







 超级会员免费看
超级会员免费看
 本文详细介绍了四舵轮底盘的运动学模型,其中底盘遵循右手坐标系,四轮分别为左前1号轮、右前2号轮、左后3号轮和右后4号轮。转向时,逆时针旋转角速度为正,顺时针为负。舵轮的转向范围限制在x轴正半轴,角度范围为 -M_PI/2 到 M_PI/2。文章探讨了正解(速度向量合成)和逆解(速度向量拆分)方法。
本文详细介绍了四舵轮底盘的运动学模型,其中底盘遵循右手坐标系,四轮分别为左前1号轮、右前2号轮、左后3号轮和右后4号轮。转向时,逆时针旋转角速度为正,顺时针为负。舵轮的转向范围限制在x轴正半轴,角度范围为 -M_PI/2 到 M_PI/2。文章探讨了正解(速度向量合成)和逆解(速度向量拆分)方法。
四舵轮底盘运动学模型(四轮四独立转向)一
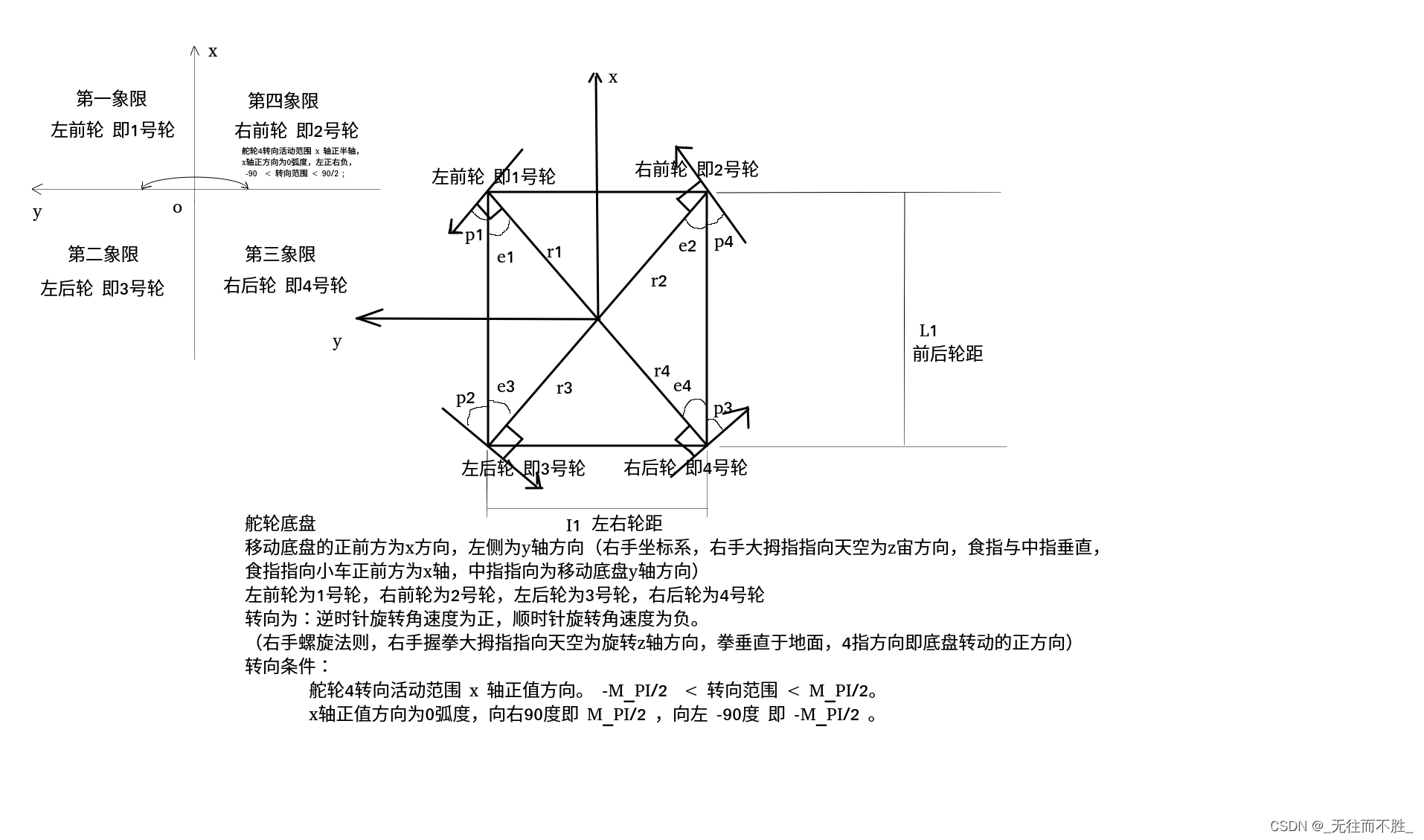
舵轮底盘(四轮四独立转向):
移动底盘的正前方为x方向,左侧为y轴方向(遵循右手坐标系,右手大拇指指向天空为z轴方向,食指与中指垂直,食指指向小车正前方为x轴,中指指向为移动底盘y轴方向)
左前轮为1号轮,右前轮为2号轮,左后轮为3号轮,右后轮为4号轮
转向:逆时针旋转角速度w为正,顺时针旋转角速度w为负。(遵循右手螺旋法则,右手握拳大拇指指向天空为旋转z轴方向,拳垂直于地面,4指方向即底盘转动的正方向)
转向条件:
舵轮4转向活动范围 x 轴正半轴,x轴正方向为0弧度,左正右负, -M_PI/2 < 转向范围 < M_PI/2; 向右90度即 M_PI/2 ,向左 -90度 即 -M_PI/2 。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 4137
4137

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











