







修改日志:
2021-10-16 增加了VS2019联和Vrep仿真代码
实现效果如图:
1.四舵轮模型
先介绍舵轮几个概念
v1 v2 v3 v4四个舵轮轮速
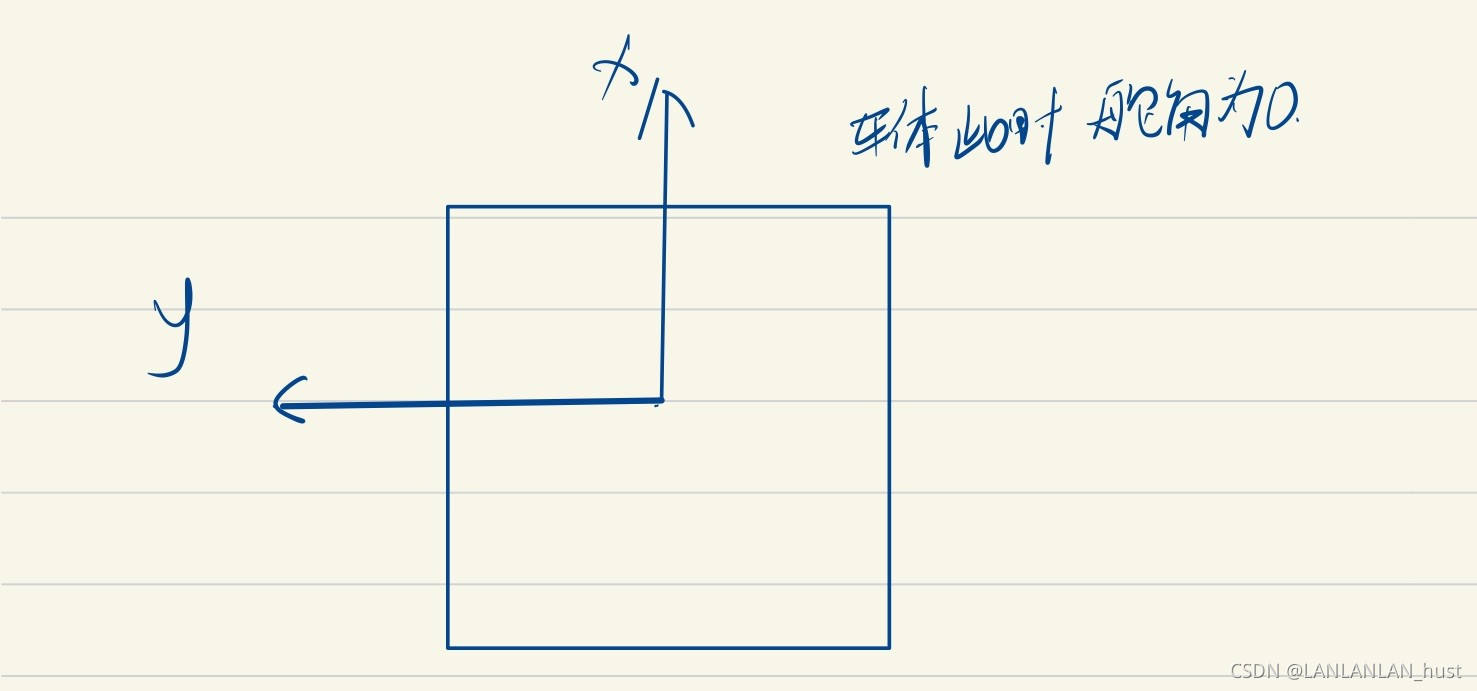
O1 O2 O3 O4四个舵轮舵角,规定舵角为与车体正方向为x正半轴建立坐标系中,与x正半轴的夹角,大小为-180到180
V Vw V是用户输入车体的平移方向,V是是矢量(假如输入Vx与Vy那么可以自己算V) 与自旋速度值。我们要做的就是分解三个速度为八个电机的值
平移
平移应该很容易相通就是四个舵角朝向一致,轮速为V
自旋
自旋也很容易,逆时针为正向的话,此时就是轮子摆成与车体正中心垂直的角度,轮速方向逆时针转一圈,速度可正可负,则为了让电机转角最小,如下
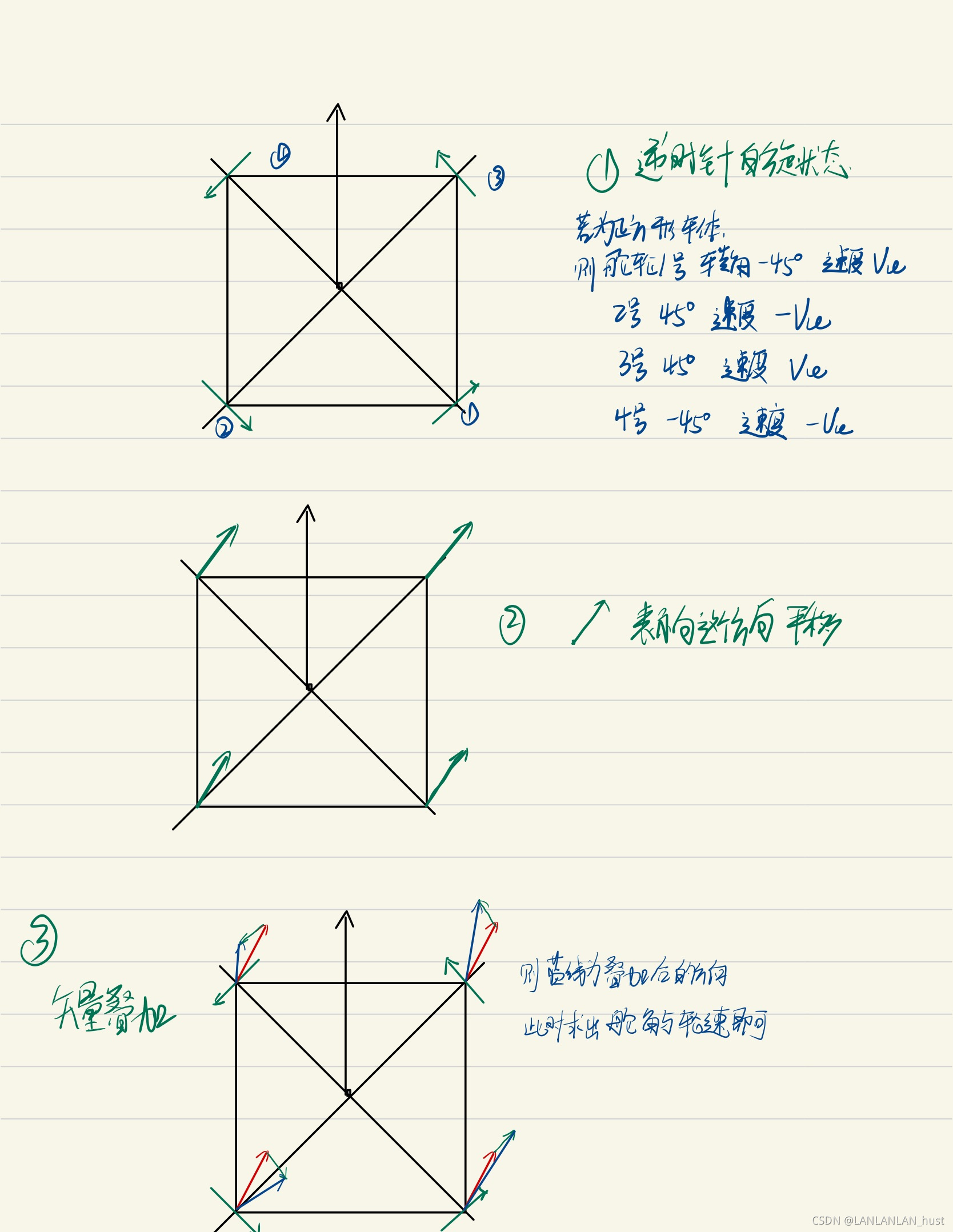
融合,矢量叠加
如上图最后一个所示
那么实际也是如此吗?看下图例子
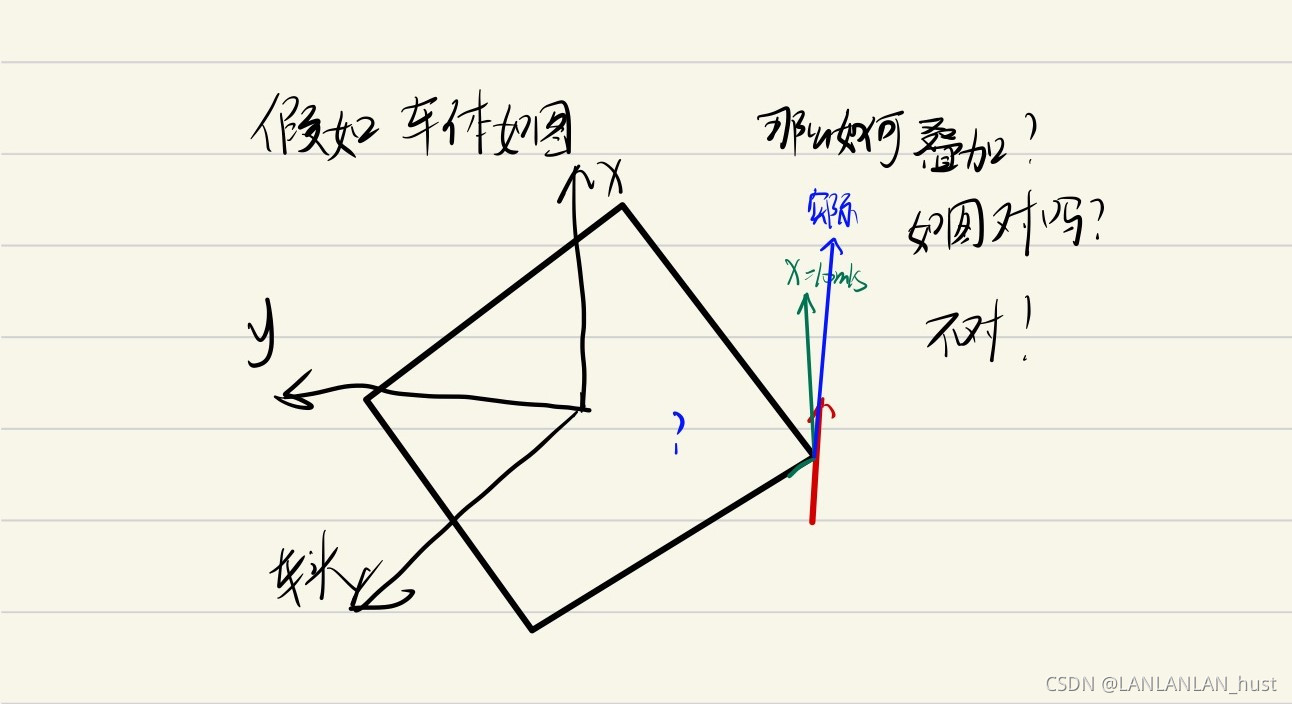
大家思考一下对不对,最好自己画一下
哈哈哈是对的!因为这是画的图,但也不对,因为没有具体写代码来分解运动,代码过程中要考虑自旋矢量的方向是时时刻刻改变的,并且叠加完的速度再传递给电机时候需要从xy坐标系转换到电机的转角坐标系,电机的转角的多少是相对于车头方向的!
我的当时笔记如下,虽然字有些丑咳咳
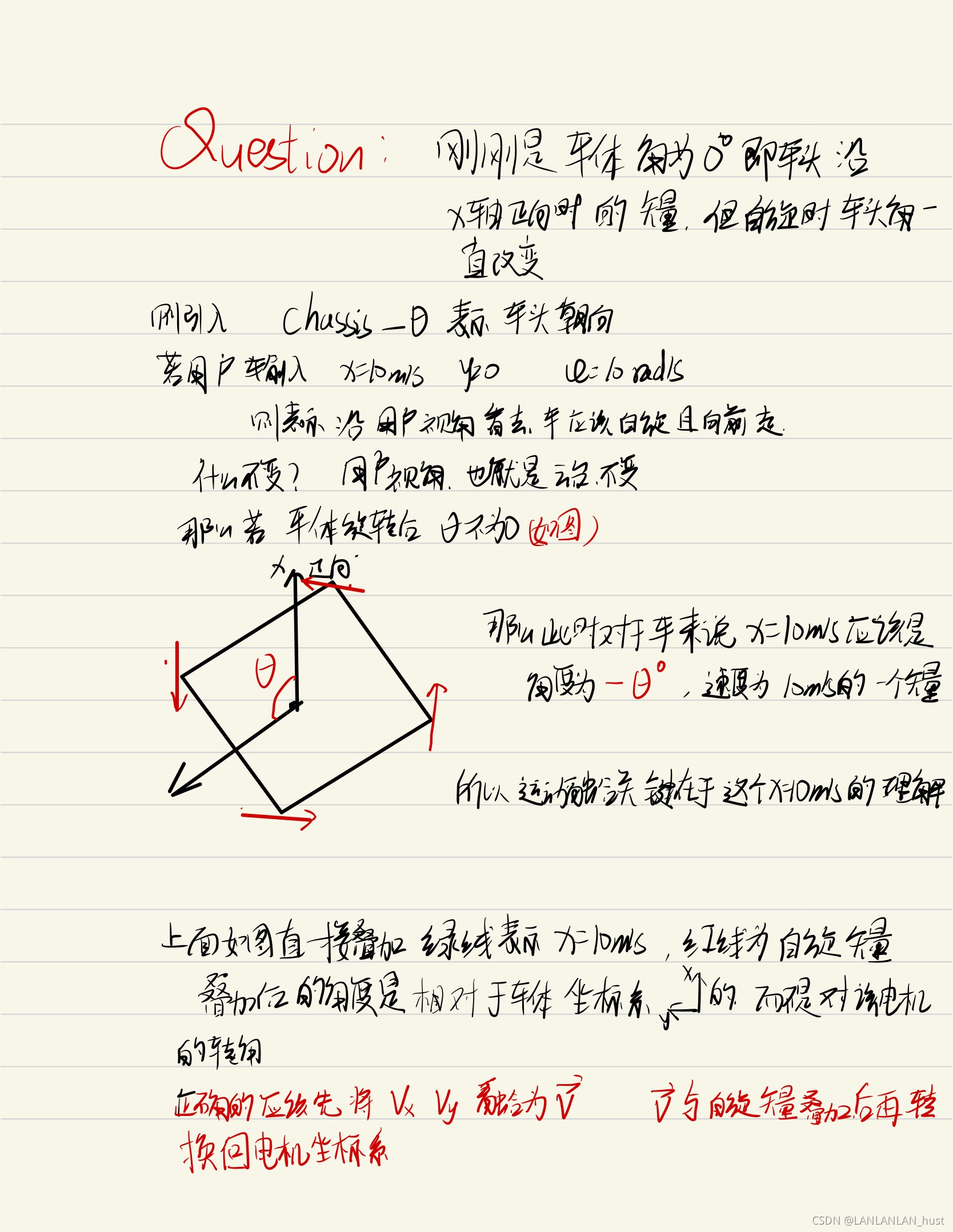
那么解决方法就是引入角,表示车体朝向
下面是个例子,如何计算某一时刻的自旋矢量
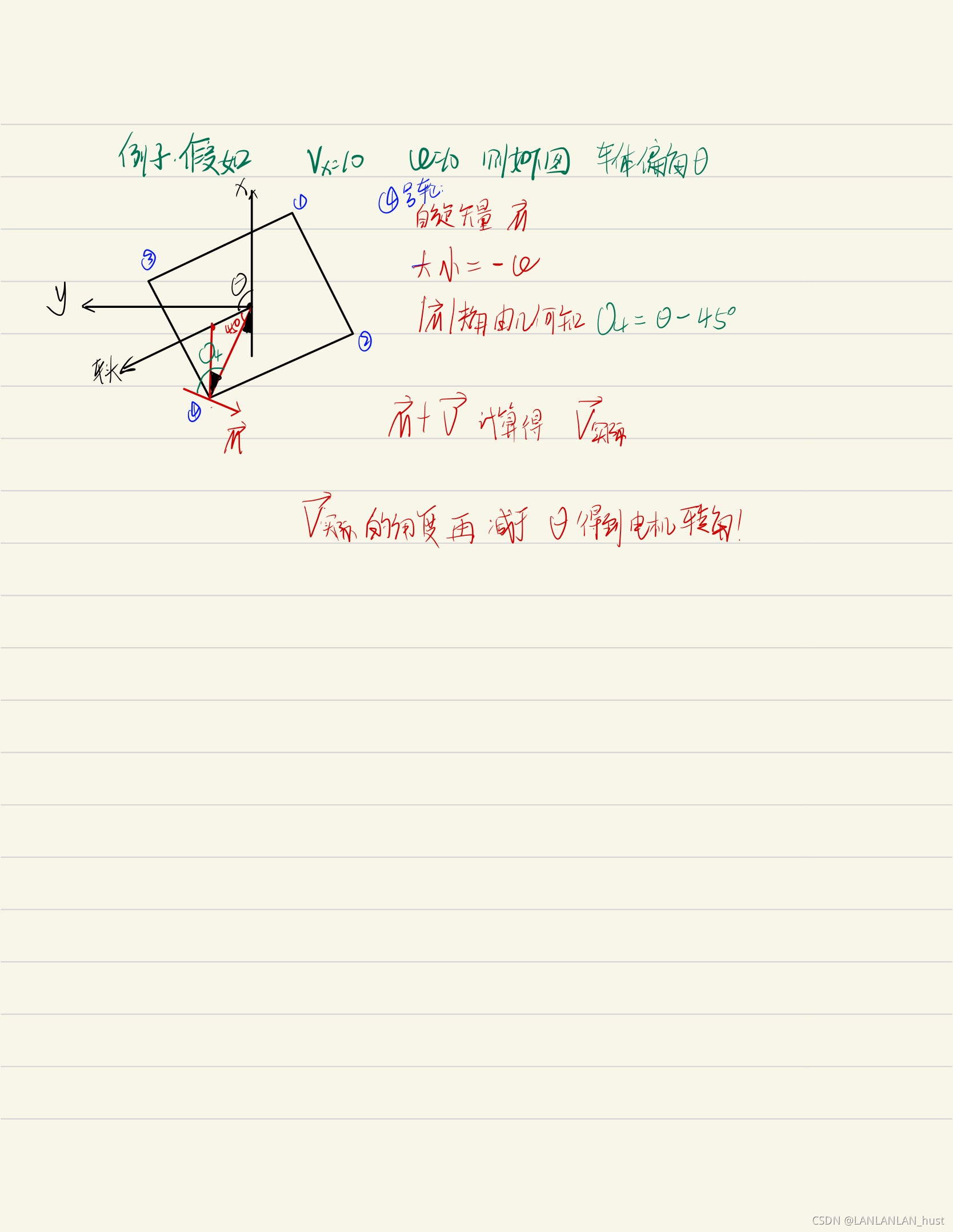
至于为什么速度是负数,不换成角度-180°后,速度为正?
因为自旋过程中我们要减少电机变向力度,你可以从车头为0°一点一点画一圈,你会发现1号和4号轮子负速度是最节省的。
代码具体自己谢谢看咯,哪里不清楚可以评论
补充:
使用vs2019配合官方给的remoteAPI写的一个运动结算函数,截取关键步骤,建议读懂后自己写一下,有些细节处理可能只看代码一下子是看不懂的,需要自己谢谢根据实际情况调试才能懂。
main部分
#define UP VK_UP
#define DOWN VK_DOWN
#define LEFT VK_LEFT
#define RIGHT VK_RIGHT
#define W_control 0x4A // J 设置自选速度W 转转转
#define K_Gimbal 0x4B // K 模拟云台选择10°,相对于自选时候的基准方向旋转了10°
#define switch_ 0x4C // L 切换运动模式,直线底盘跟随云台,或者自选运动模式
void main()
{
if (clientID != -1)
{
cout << "V-rep connected.";
simxStartSimulation(clientID,simx_opmode_oneshot);
}
else
{
cout << "V-rep can't be connected.";
}
Chassis Robot1(clientID);
while (1) {
Key_control();
Robot1.Control(x, y, z, Gimbal);
Robot1.Chassis_run();
Sleep(10);
}
//cin.get();
simxStopSimulation(clientID, simx_opmode_oneshot);
simxFinish(clientID);
return;
}
Key_contol_type key1 = {0,0,0,0};
//键盘控制
void Key_control() {
x = 0;
y = 0;
z = 0;
if (GetAsyncKeyState(UP) & 0x8000) //下
{
x = 40;
}
if (GetAsyncKeyState(DOWN) & 0x8000) //下
{
x = -40;
}
if (GetAsyncKeyState(LEFT) & 0x8000) //下
{
y = 40;
}
if (GetAsyncKeyState(RIGHT) & 0x8000) //下
{
y = -40;
}
if (GetAsyncKeyState(W_control) & 0x8000) //下
{
/*W_Flag++;*/
z = 50;
}
if (GetAsyncKeyState(K_Gimbal) & 0x8000) {
Gimbal += 10;
if (Gimbal == 180) {
Gimbal = -180;
}
}
if (GetAsyncKeyState(switch_) & 0x8000) {
move_flag ++;
}
}chassis.h
定义了一些数据结构,重要的有Velocity_vector_type 是个速度向量,因为上面的速度分解都是根据向量来算的,思路比较方便,到时候向量的角度赋给舵向转角即可
#define V_speed_limit 15//m/s
#define W_speed_limit 0.9//rad/s
#define CAR_LENGTH 0.5//m 电机0到2之间长度
#define CAR_WIDTH 0.4//m 电机0到1之间长度
typedef struct {
float v;//m/s
float yaw;//rad
}Velocity_vector_type;
typedef struct {
simxInt motor_pitch, motor_yaw;//电机控制handle
Velocity_vector_type Velocity_vector;//速度向量
Velocity_vector_type Velocity_vector_last;//上一次速度;
}Wheel_control_type;
Velocity_vector_type Subtraction(Velocity_vector_type *a, Velocity_vector_type *b);//实现向量a-b
Velocity_vector_type add(Velocity_vector_type *a, Velocity_vector_type *b);//实现向量a+b
class Chassis {
public:
Chassis(int clientID);
private:
Wheel_control_type Wheel[4];//用于控制四个轮子运动
Velocity_vector_type Wheel_Info[4];
float Circle_rad;//正方形就是45°的弧度制
float yaw_diff;
float Chassis_yaw;
float Gimbal_;
simxInt Car_Handle;
private:
int clientID;
public:
void Chassis_run();
void Chassis_GetOrientation(void);
void Control(float x_speed, float y_speed, float w_speed,float Gimbal);//外部接口输出速度分解,gimbal是云台偏离正方向的角度
float Control_direct(float x_speed, float y_speed, float w_speed);//直接输入三项速度,返回得到云台与底盘夹角作为setpoint
void Circle_Control(float w_speed);
};
#endif // CHASSIS_Hchassis.c
主要解算函数,现在Contol函数内计算完八个电机的参数,Run函数内给电机传参数
计算的函数理论就是基于上面分析,有几个函数是Vrep的remoteAPI函数,用来控制仿真的车,作用看函数名即可,都是用来获取yaw数据,转速等等,实际车上对应就是陀螺仪与编码器反馈,重要的是理解,不懂仿真也没事,可以看的懂
#include "Chassis.h"
//获取底盘位姿
float AngleFloats[3];
float PointFloats[3];
char StrTemp[20] = { 0 };
extern int move_flag;
Velocity_vector_type Wheel_Init[4] = { 0 };
Pid_Typedef move_Gimbal_speed = { 0 };
//初始化
Chassis::Chassis(int ID){
clientID = ID;
Gimbal_ = 0;
Chassis_yaw = 0;
yaw_diff = 0;
for (int i = 0; i < 4; i++) Wheel[i].Velocity_vector.v = 0, Wheel[i].Velocity_vector.yaw = 0;
simxGetObjectHandle(clientID, "motor_yaw_0", &Wheel[0].motor_yaw, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_pitch_0", &Wheel[0].motor_pitch, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_yaw_1", &Wheel[1].motor_yaw, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_pitch_1", &Wheel[1].motor_pitch, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_yaw_2", &Wheel[2].motor_yaw, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_pitch_2", &Wheel[2].motor_pitch, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_yaw_3", &Wheel[3].motor_yaw, simx_opmode_blocking);
simxGetObjectHandle(clientID, "motor_pitch_3", &Wheel[3].motor_pitch, simx_opmode_blocking);
simxGetObjectHandle(clientID, "HEAD", &Car_Handle , simx_opmode_blocking);
//pid init
move_Gimbal_speed.P = 5;
move_Gimbal_speed.I = 0;
move_Gimbal_speed.D = 0;
move_Gimbal_speed.ErrorMax = 1000.0f;
move_Gimbal_speed.IMax = 200;
move_Gimbal_speed.SetPoint = 0.0f;
move_Gimbal_speed.OutMax = 30; //最大占空比
//逆时针为正方向
Circle_rad = atan(CAR_LENGTH / CAR_WIDTH);
printf("atan:%.4f\t", Circle_rad);
Wheel_Init[0].v = 0; Wheel_Init[0].yaw = - Circle_rad;
Wheel_Init[1].v = 0; Wheel_Init[1].yaw = Circle_rad;
Wheel_Init[2].v = 0; Wheel_Init[2].yaw = Circle_rad;
Wheel_Init[3].v = 0; Wheel_Init[3].yaw = - Circle_rad;
}
//外部接口输出速度分解
float car_V;//车体总体朝向与速度
float car_R;
float car_yaw;
void Chassis::Control(float x_speed, float y_speed, float w_speed, float Gimbal) {
for (int i = 0; i < 4; i++) {//记录上次速度
Wheel[i].Velocity_vector_last = Wheel[i].Velocity_vector;
}
Gimbal_ = DEG2R(Gimbal);
Chassis_GetOrientation();//获取底盘与云台的夹角
car_V = sqrt(x_speed * x_speed + y_speed * y_speed);
if (car_V > V_speed_limit) car_V = V_speed_limit;
car_yaw = R2DEG(atan2(y_speed, x_speed));
//角度处理
if (ABS(car_yaw > 90)) car_yaw = car_yaw - 180 , car_V = -car_V;
if (ABS(car_yaw < -90)) car_yaw = car_yaw + 180 , car_V = -car_V;
car_yaw = DEG2R(car_yaw);
Wheel[0].Velocity_vector.yaw = car_yaw + DEG2R(8); Wheel[0].Velocity_vector.v = car_V;
Wheel[1].Velocity_vector.yaw = car_yaw + DEG2R(13); Wheel[1].Velocity_vector.v = car_V;
Wheel[2].Velocity_vector.yaw = car_yaw + DEG2R(13); Wheel[2].Velocity_vector.v = car_V;
Wheel[3].Velocity_vector.yaw = car_yaw + DEG2R(13); Wheel[3].Velocity_vector.v = car_V;
switch (move_flag%2) {
case 0:
//在世界坐标系中云台跟随,当前云台朝向设置为setpoint,当前值为车头
move_Gimbal_speed.SetPoint = Gimbal_;
w_speed = PID_Calc(&move_Gimbal_speed, Chassis_yaw);
if (ABS(R2DEG(Gimbal_ - Chassis_yaw)) < 3) {
w_speed = 0;
}
if (w_speed != 0) {
/**************************circle self part************************************/
//速度赋值Gimbal_
Wheel_Init[0].v = w_speed;
Wheel_Init[1].v = -w_speed;
Wheel_Init[2].v = w_speed;
Wheel_Init[3].v = -w_speed;
//计算轮子垂直向量坐标的角度朝向,在需要控制的云台坐标系中,use for circle self
Wheel_Init[0].yaw = Gimbal_ - Circle_rad;
Wheel_Init[1].yaw = Gimbal_ + Circle_rad;
Wheel_Init[2].yaw = Gimbal_ + Circle_rad;
Wheel_Init[3].yaw = Gimbal_ - Circle_rad;
/*********************************end**************************************/
//this time ,car's move position is gimbal's positon
for (int i = 0; i < 4; i++) {
Wheel[i].Velocity_vector.yaw += Gimbal_;
}
//分别在云台坐标系中直线与垂直向量相加得到和矢量,然后换算回电机坐标系
for (int i = 0; i < 4; i++) {
Wheel[i].Velocity_vector = add(&(Wheel[i].Velocity_vector), &(Wheel_Init[i]));
Wheel[i].Velocity_vector.yaw = Wheel[i].Velocity_vector.yaw - Gimbal_;//切换回电机yaw的坐标系
}
//printf("结果:%.8f, 叠加后的速度:%.5f\n\n", R2DEG(Wheel[3].Velocity_vector.yaw), Wheel[3].Velocity_vector.v);
}
printf("zhixian:%.5f\n\n", R2DEG(Gimbal_));
break;
case 1:
if (w_speed != 0) {
//速度赋值
Wheel_Init[0].v = w_speed;
Wheel_Init[1].v = -w_speed;
Wheel_Init[2].v = w_speed;
Wheel_Init[3].v = -w_speed;
//计算轮子垂直向量坐标的角度朝向,在云台坐标系中
Wheel_Init[0].yaw = yaw_diff - Circle_rad;
Wheel_Init[1].yaw = yaw_diff + Circle_rad;
Wheel_Init[2].yaw = yaw_diff + Circle_rad;
Wheel_Init[3].yaw = yaw_diff - Circle_rad;
//分别在云台坐标系中直线与垂直向量相加得到和矢量,然后换算回电机坐标系
for (int i = 0; i < 4; i++) {
Wheel[i].Velocity_vector = add(&(Wheel[i].Velocity_vector), &(Wheel_Init[i]));
Wheel[i].Velocity_vector.yaw = Wheel[i].Velocity_vector.yaw - yaw_diff;//切换回电机yaw的坐标系
}
//printf("结果:%.8f, 叠加后的速度:%.5f\n\n", R2DEG(Wheel[3].Velocity_vector.yaw), Wheel[3].Velocity_vector.v);
}
break;
}
//printf("正方向:%.8f\n", car_yaw);
//printf("V_x:%.5f V_y:%.5f V:%.5f \tYAW:%.2f\n", x_speed, y_speed, car_V, Wheel[0].yaw);
}
//底盘运行函数
void Chassis::Chassis_run(void) {
//最小转角
for (int i = 0; i < 4; i++) {
if (ABS(Wheel[i].Velocity_vector.yaw - Wheel[i].Velocity_vector_last.yaw) > DEG2R(90) )//如果变换角度大于90°
{
if (Wheel[i].Velocity_vector.yaw < Wheel[i].Velocity_vector_last.yaw) {
Wheel[i].Velocity_vector.yaw += DEG2R(180);
}
else {
Wheel[i].Velocity_vector.yaw -= DEG2R(180);
}
Wheel[i].Velocity_vector.v = -Wheel[i].Velocity_vector.v;
}
simxSetJointTargetVelocity(clientID, Wheel[i].motor_pitch, Wheel[i].Velocity_vector.v, simx_opmode_oneshot);
simxSetJointTargetPosition(clientID, Wheel[i].motor_yaw, Wheel[i].Velocity_vector.yaw, simx_opmode_oneshot);
}
}
//获取底盘目前朝向相对于云台夹角,取-90到90
static short First_Flag = 0;
void Chassis::Chassis_GetOrientation(void) {
simxGetObjectOrientation(clientID, Car_Handle, -1, &AngleFloats[0], simx_opmode_blocking);
sprintf_s(StrTemp, 20, "%.8f", AngleFloats[2]);
Chassis_yaw = (float)(atof(StrTemp));//车头朝向
yaw_diff = (float)(atof(StrTemp))+DEG2R(68) - Gimbal_;//自旋参数,得到底盘与云台的差值,后面减的值是云台偏离正方向的角度,模拟云台
printf("云台正方向:%.8f\n", R2DEG(Gimbal_));
}
Velocity_vector_type Subtraction(Velocity_vector_type *a, Velocity_vector_type *b) //实现向量a-b
{
Velocity_vector_type temp = { 0 };
return temp;
}
Velocity_vector_type add(Velocity_vector_type *a, Velocity_vector_type *b)//实现向量a+b
{
Velocity_vector_type temp;
float x = a->v * cos(a->yaw) + b->v * cos(b->yaw);
float y = a->v * sin(a->yaw) + b->v * sin(b->yaw);
temp.v = sqrt(x * x + y * y);
temp.yaw = atan2(y, x);
//printf("x:%.5f,y:%.5f,yaw = :%.5f\n", x,y,R2DEG(temp.yaw));
return temp;
}


















 5368
5368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











