







目录
前后侧展模组
前后模组共有四个电机,本节以后侧展模组两个电机为例,前侧展模组安装与线缆引出方法与后侧展模组相同
1.DIY供电线(注意正负极)
2.标定电机与参数配置
使用USB转接模块连接上位机,首先完成对电机的标定,读取参数完成对如下参数的修改:
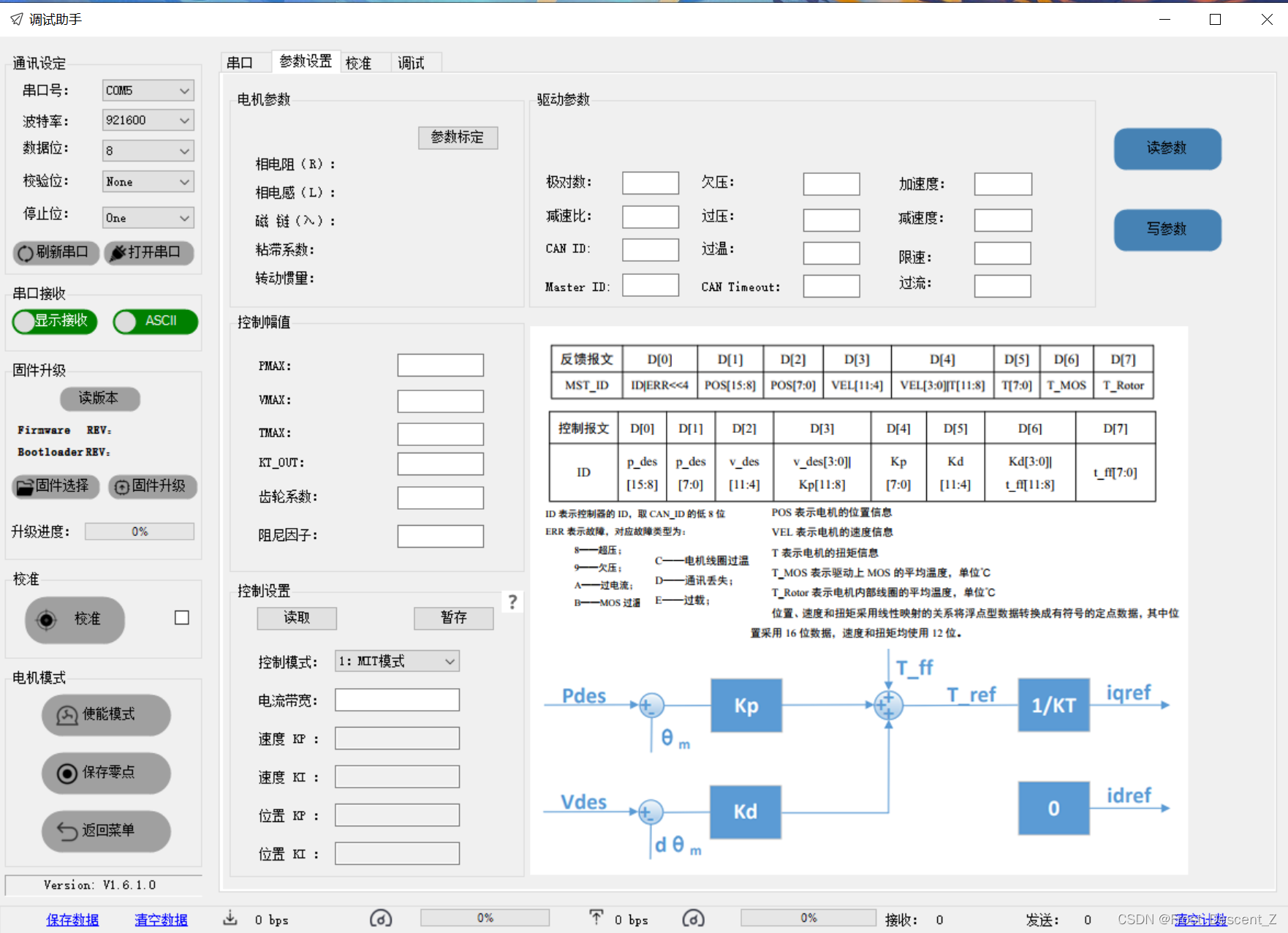
修改如下参数然后写入:加速度+10,减速度-10,电机的CAN ID配置均为3,CAN TIMEOUT 2000,过流0.8,电流环带宽为2000,其余不修改。
注:达妙电机采用达妙提供的上位机完成相应版本固件的更新,固件更新详情可咨询达妙淘宝客服。
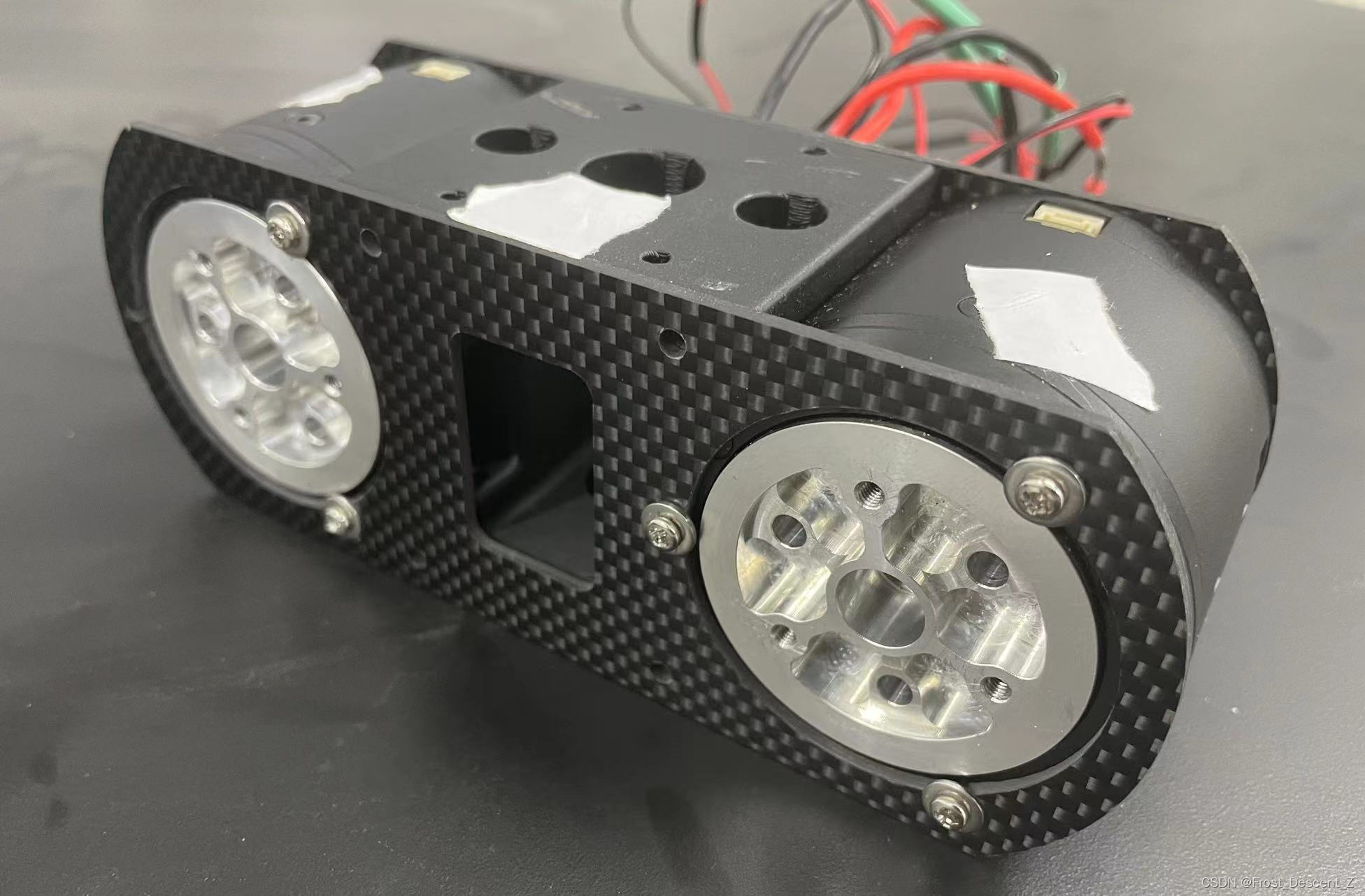
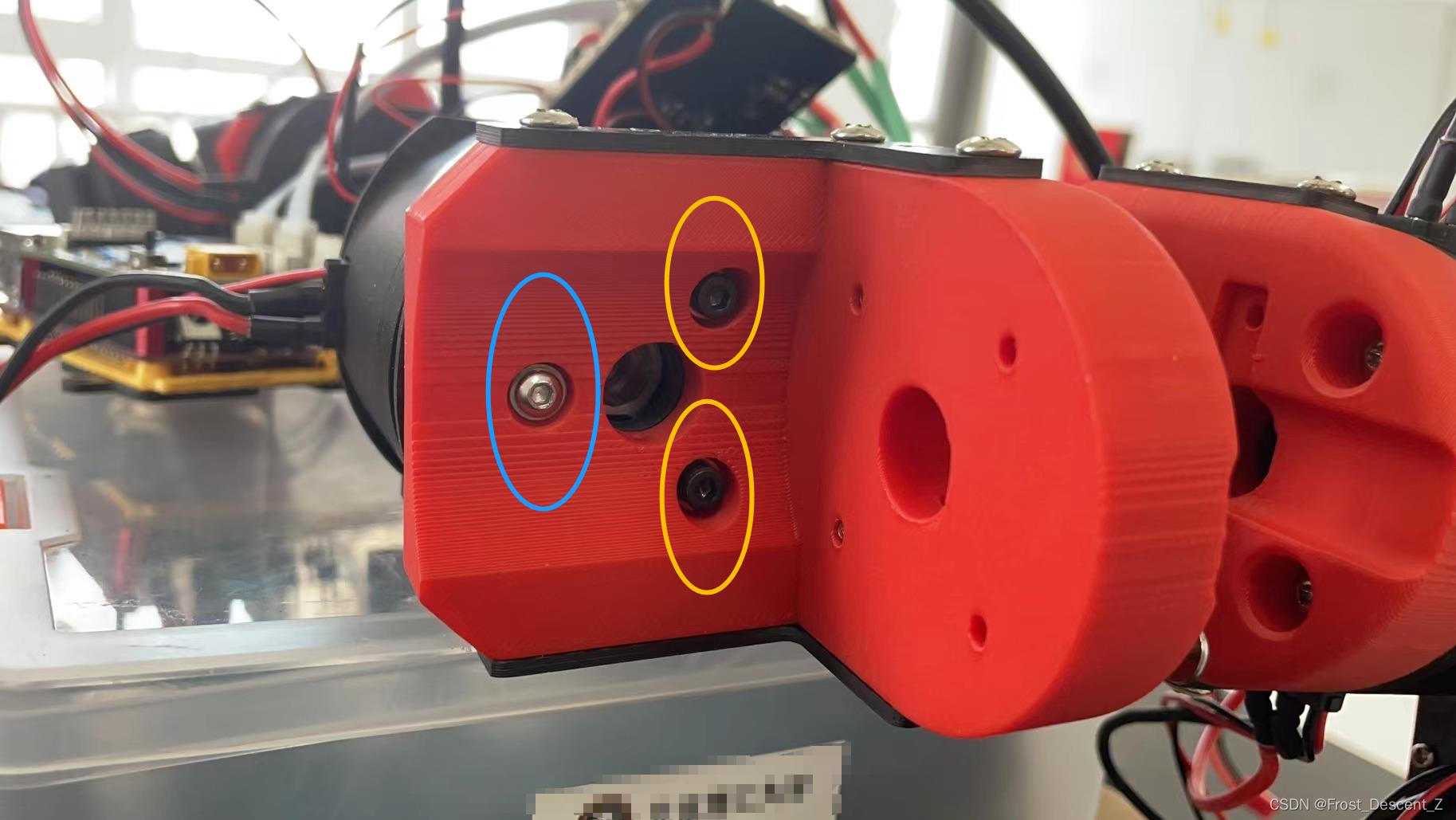
3.电机与后板的安装
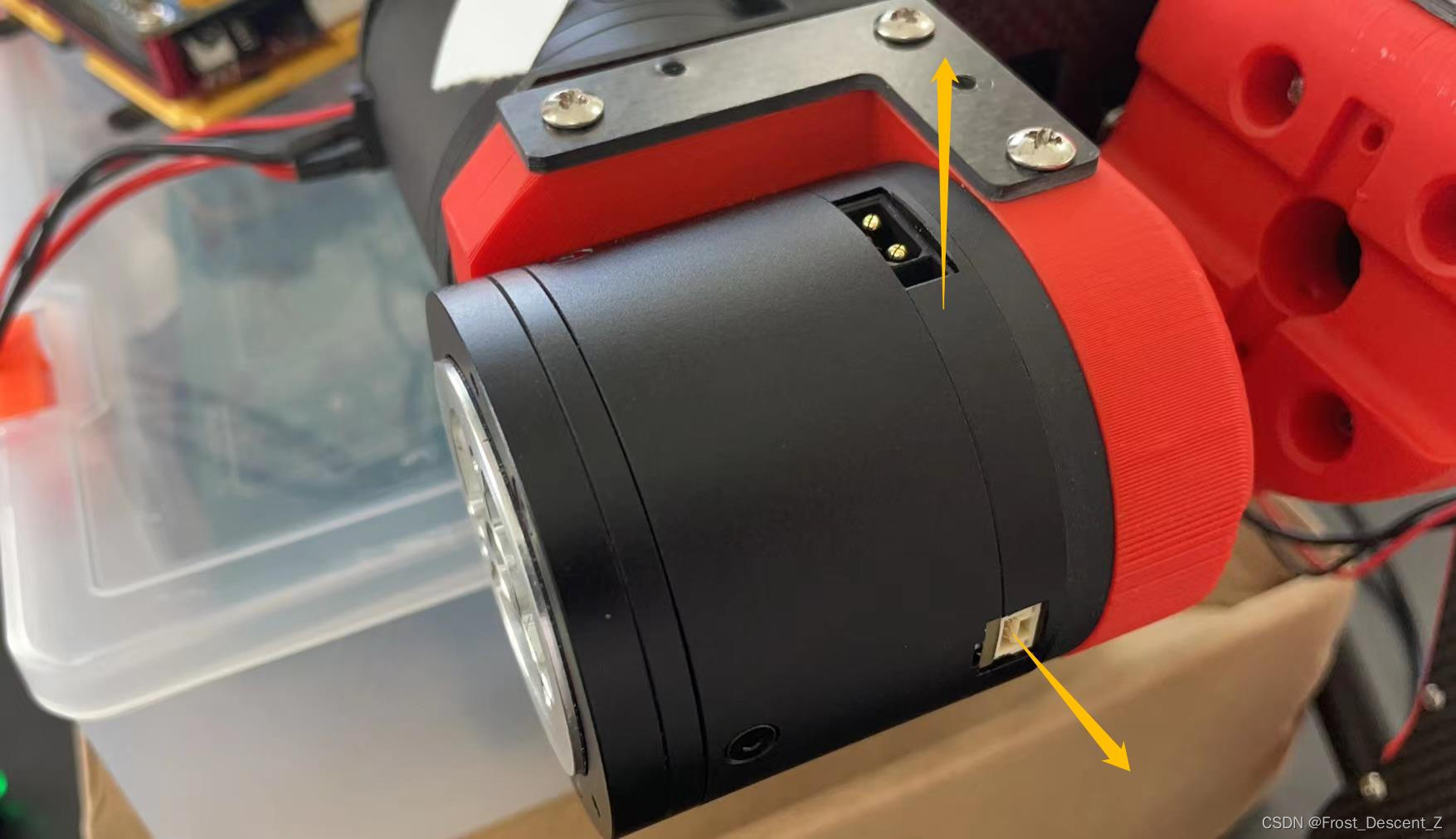
先将配套的供电插头与电机完成连接。

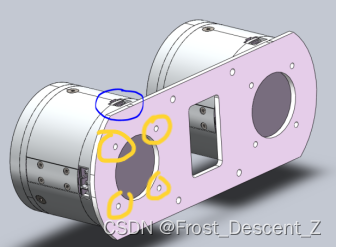
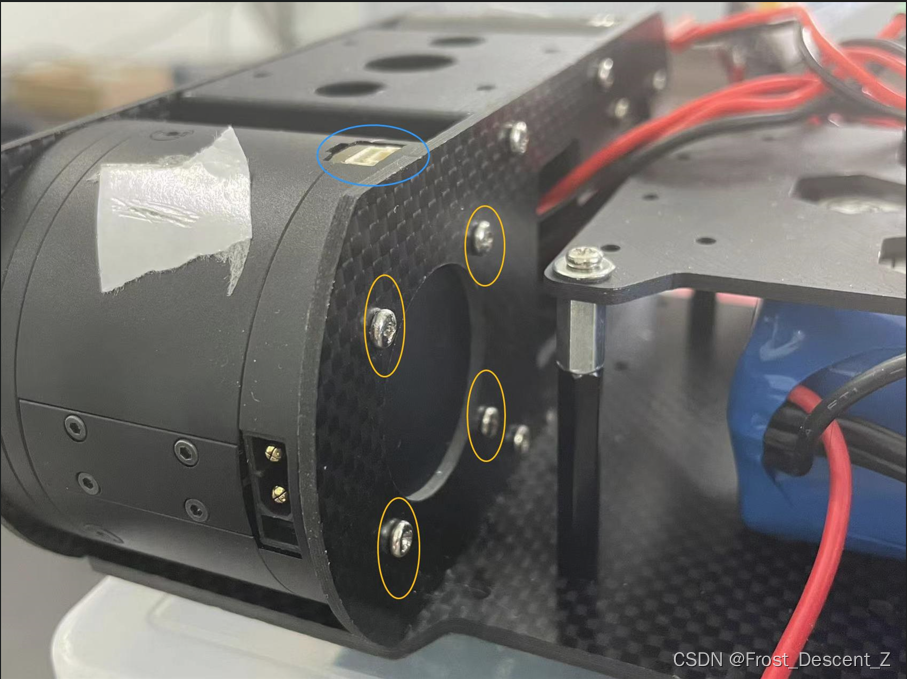
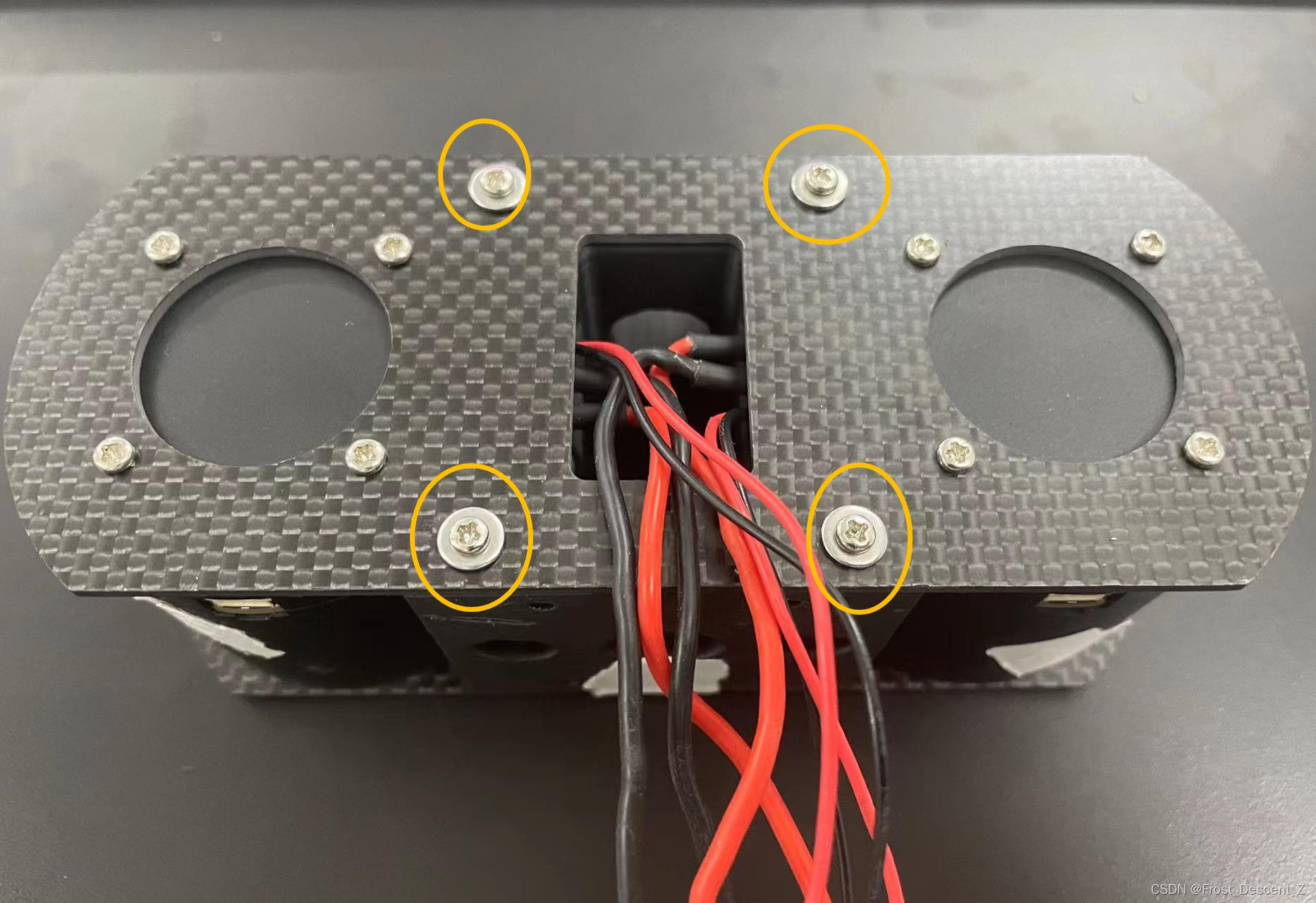
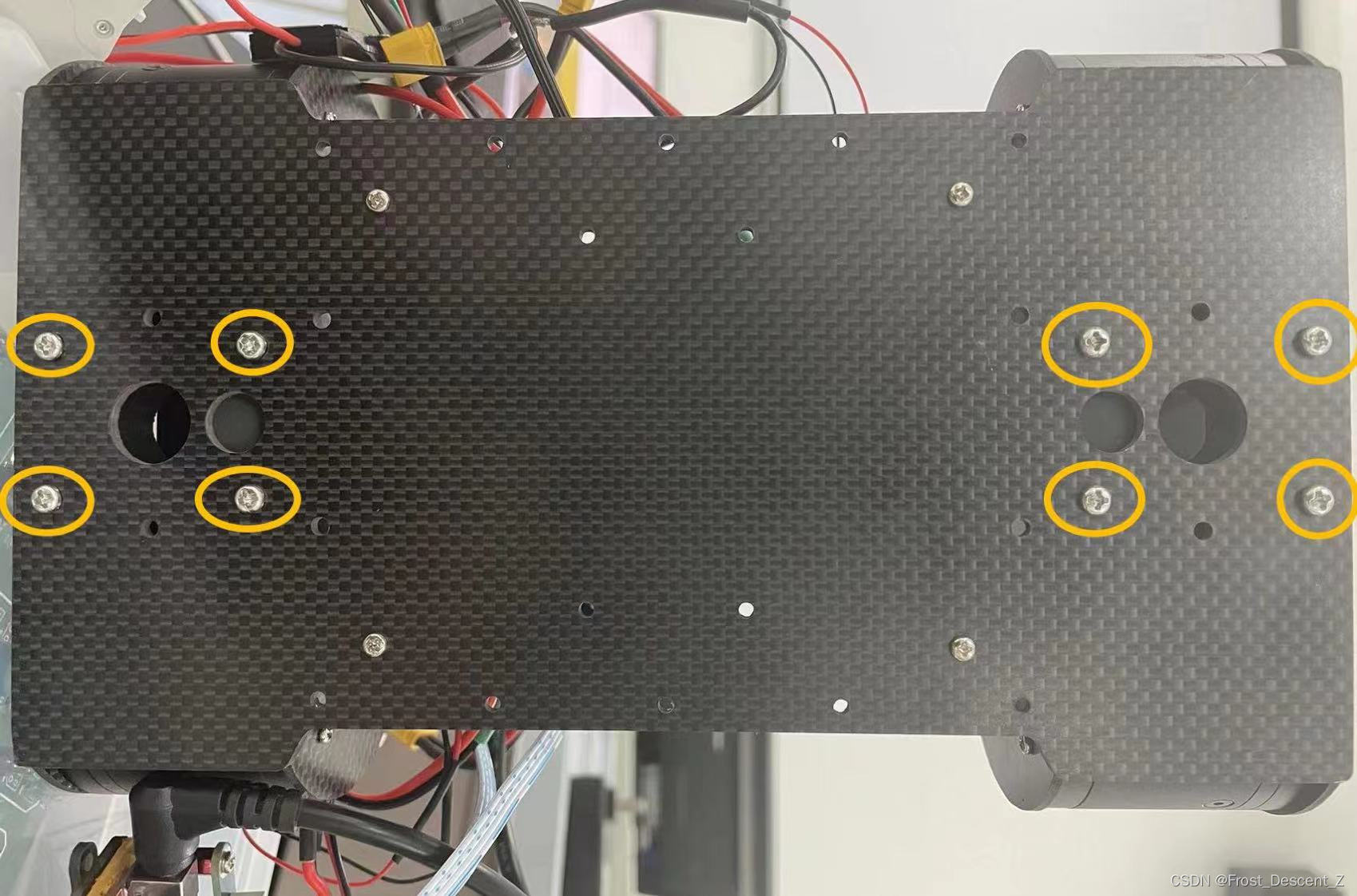
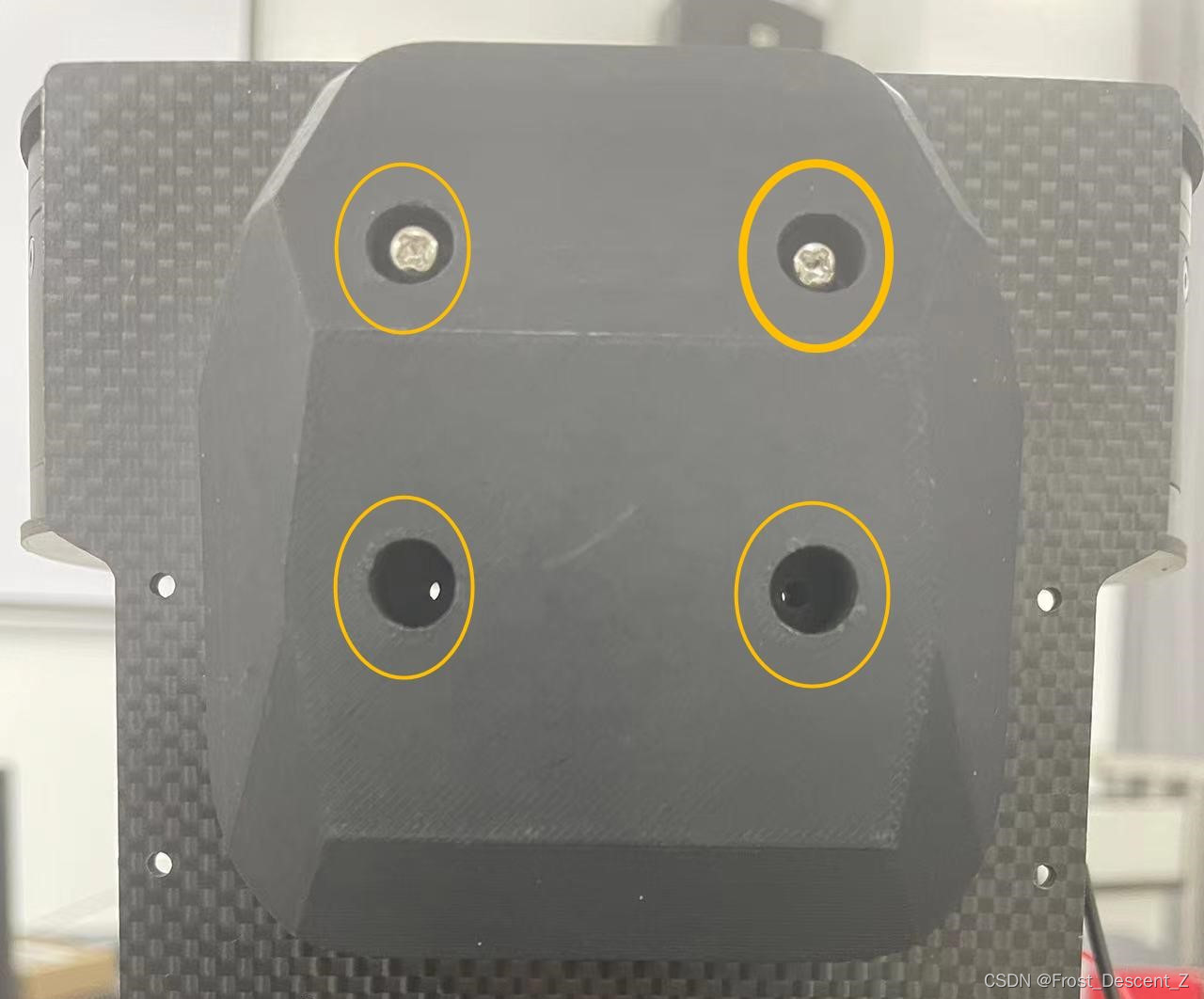
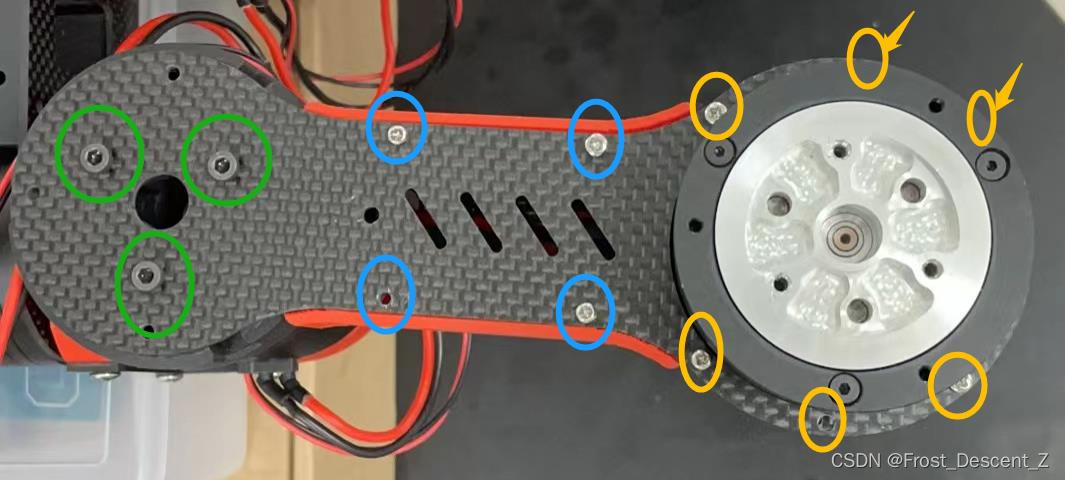
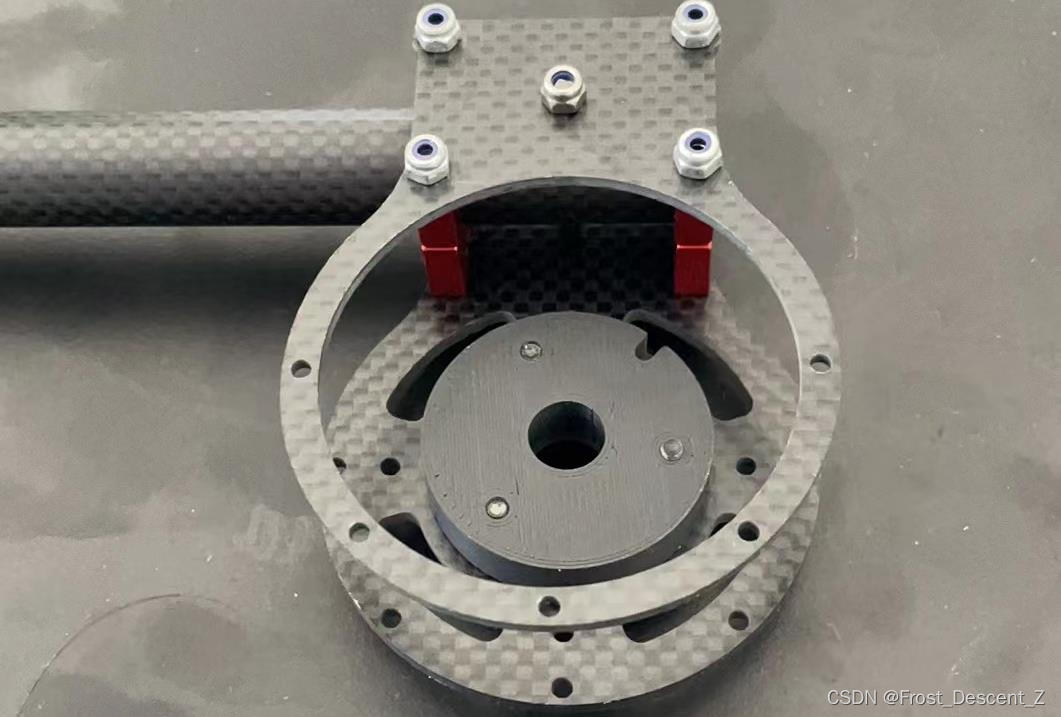
随后安装两个电机与后板,从后板的中间孔洞引出线路,采用M2.5*5螺丝进行固定,图中黄色圈标注的为螺丝孔位,图中蓝色圈标注的为电机调试口,在侧展模组与机架底座安装时电机调试口需要向上。
随后,采用M3*5螺丝,安装中间支撑3D打印件和前部支撑碳板,拧入电机的安装螺丝需要采用M2.5*D7垫片
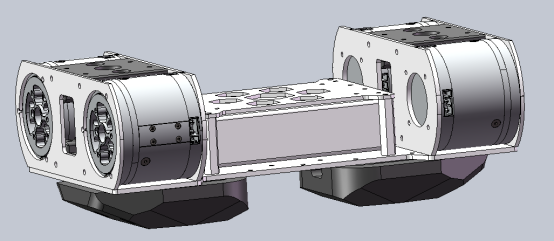
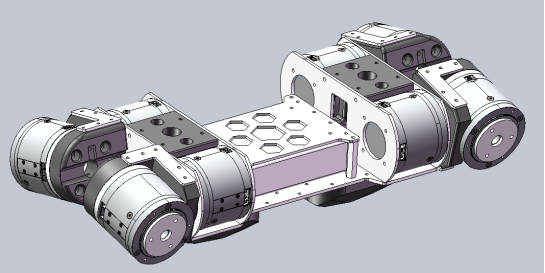
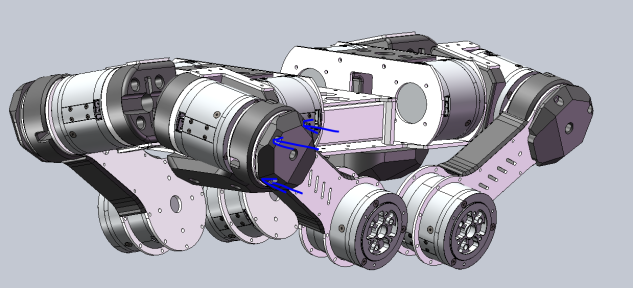
4.阶段成品图
机架底座
机架底座安装涉及到的部件有前后侧展模组,动力电池以及底板
1.侧展模组与底座的安装
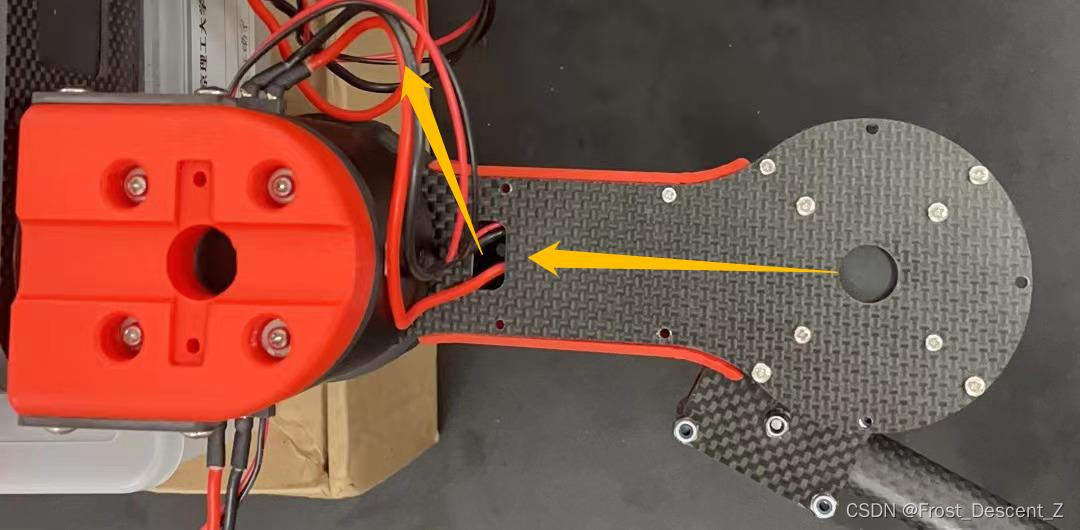
先走线将电池的DC充电头通过后板引出到机体下方,再采用M3*16螺丝将前后两个模组安固定到底板前后对应位置,为便于后续对上机位的调试与维修安装时电机的调试口最好朝上。
2.底部模块与底座的安装
共有两个底板装饰模块,本节以一侧底板模块为例,两侧模块安装与线缆引出方法相同。
先将充电头从底部装饰模块的缺口中引出。

随后采用M3*16螺丝固定底部装饰模块(由于打印件尺寸问题,可能装不上)
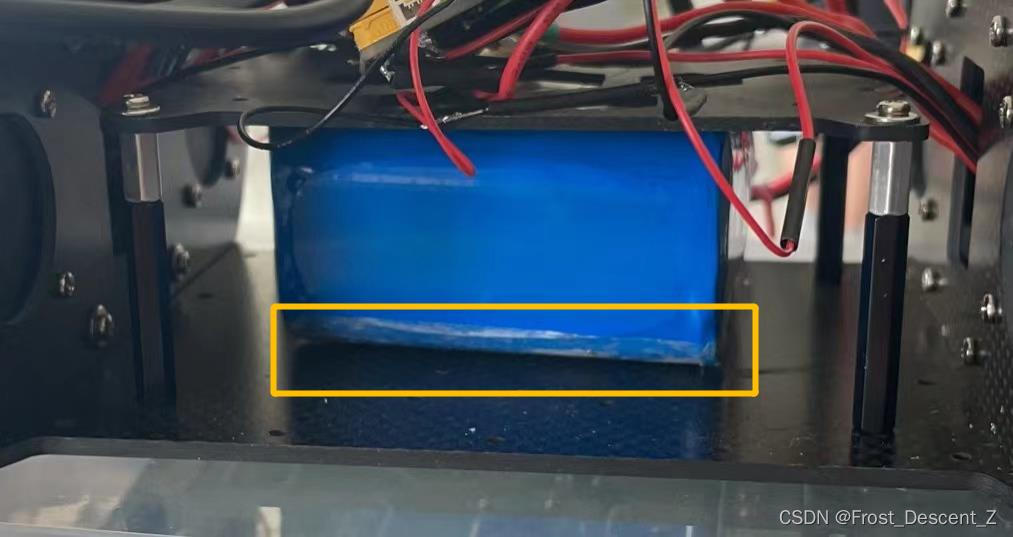
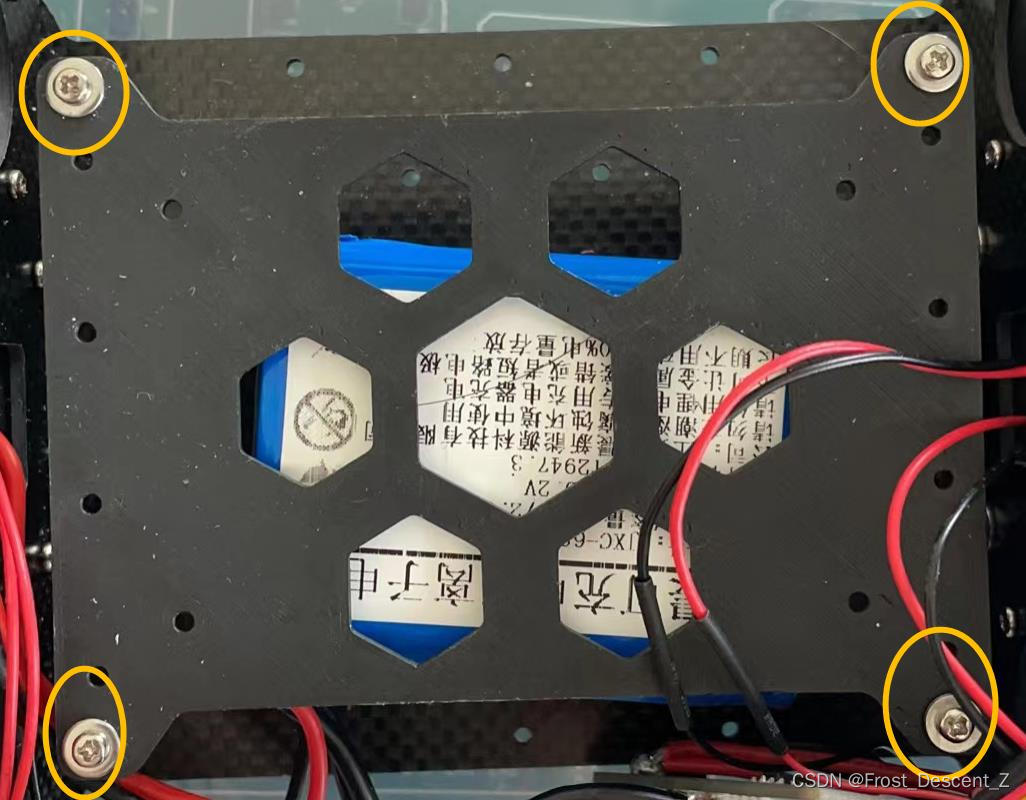
3.电池模块与底座的安装
电池置于底座中央位置,电池上板通过四个M2.5*30的铝柱和底座连接,安装4个铝柱

用双面胶将电池粘粘到底板中间部分
之后采用M2.5*5螺丝安装电池上板:
4.阶段成品图
大腿电机模组
此步骤共需要4个电机,完成4个大腿模组的组装。
1.DIY供电线(注意正负极)
2.标定电机与参数配置
使用USB转接模块连接上位机,首先完成对电机的标定,读取参数完成对如下参数的修改:
修改如下参数然后写入:加速度+10,减速度-10,电机的CAN ID配置均为1,CAN TIMEOUT 2000,过流0.8,电流环带宽为2000,其余不修改。
注:达妙电机采用达妙提供的上位机完成相应版本固件的更新,固件更新详情可咨询达妙淘宝客服。
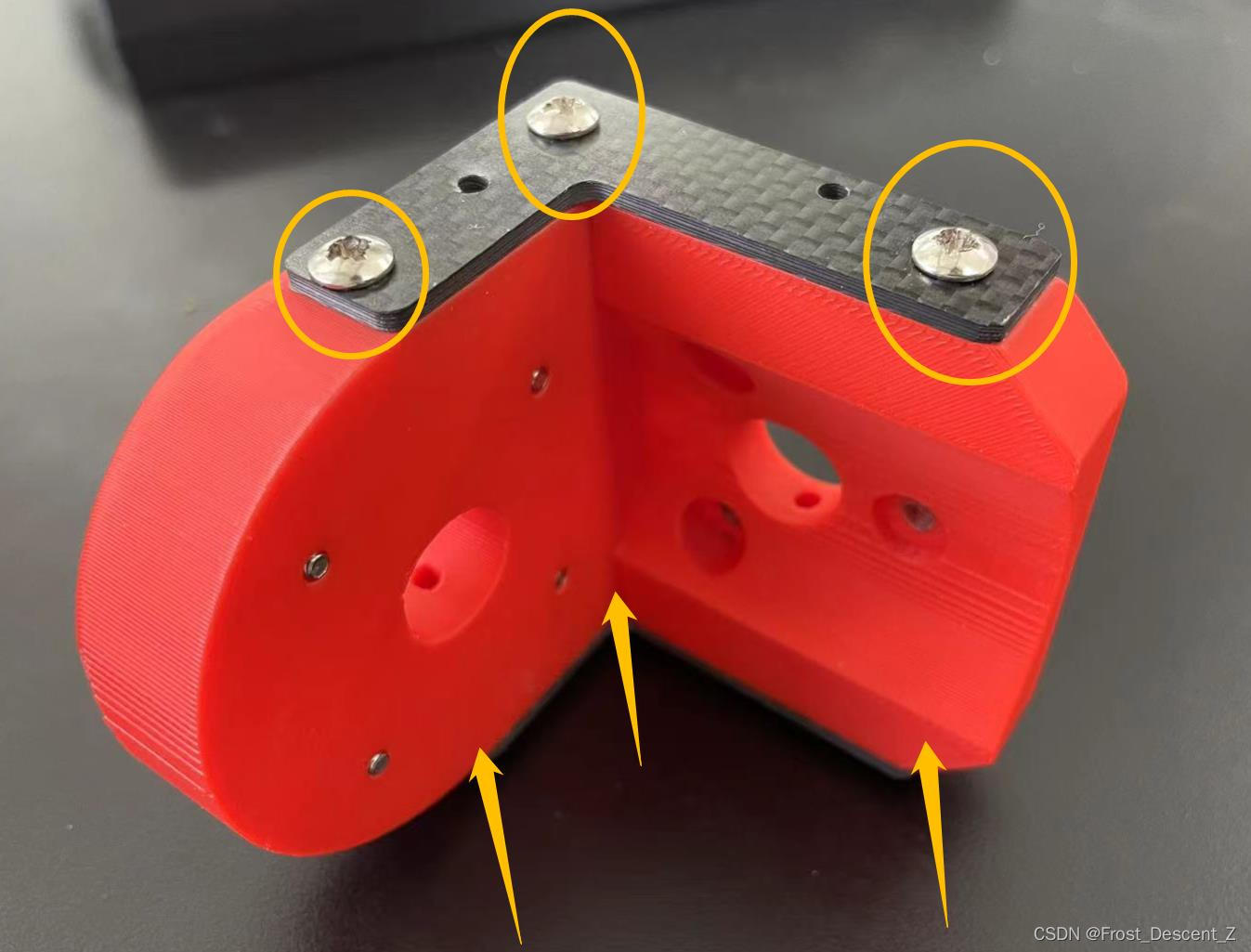
3.3D打印件和加固碳板的安装
首先3D打印件安装加固碳板,采用M3*8自攻螺丝固定:
4.大腿模组与侧展模组的安装
大腿模组与侧展模组安装时先在底座和侧展电机间加装5mm厚度的碳板垫片

再采用M3*15 平头螺丝(这里实际操作后自主更改了一处螺丝,推测由于打印件孔位误差导致)

采用所选螺丝加上M3*D7垫片固定,完成一体化安装
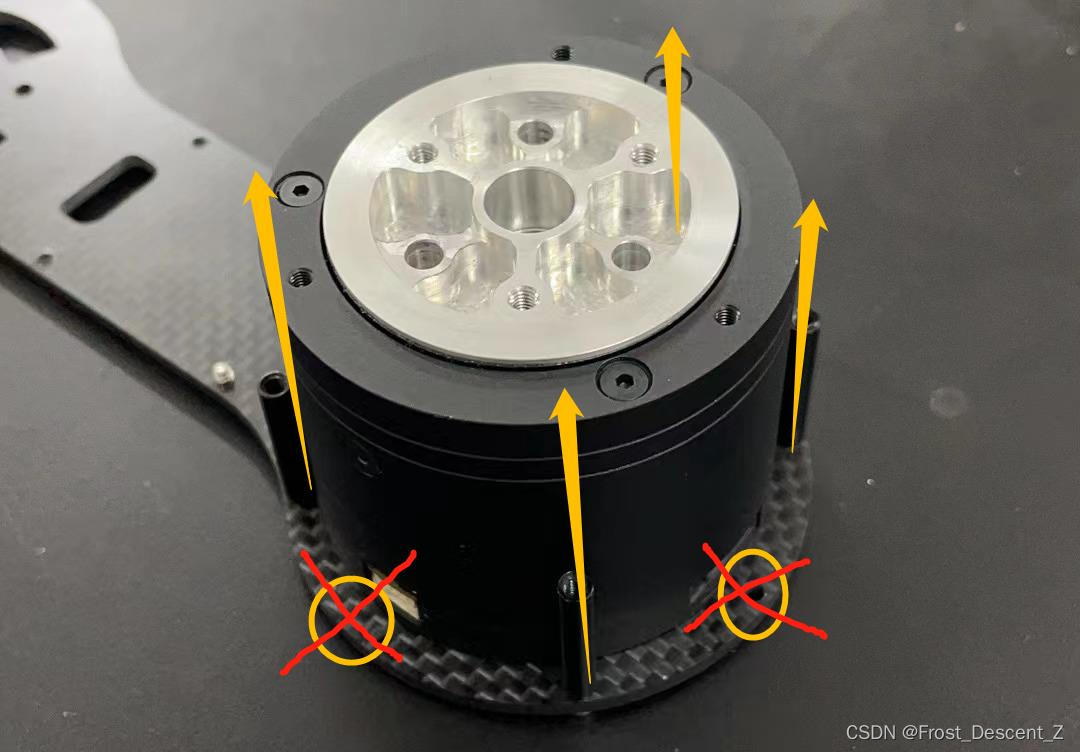
5.大腿电机与大腿模组的安装
大腿电机与大腿模组的安装先加装5mm厚的碳板垫片,

再采用M2.5*20螺丝加上M2.5*D7垫片固定。由于机器人版本和使用需求的不同,大腿电机供电口朝向有多种选择,这里采用供电口朝上的方式。
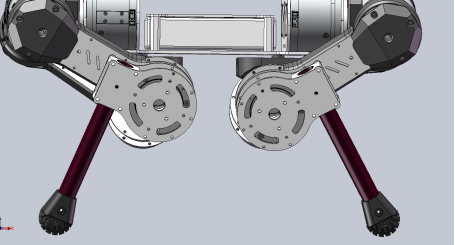
6.阶段成品图
机器大腿
此步骤共需要4个电机,完成4条大腿的组装。
1.DIY供电线(注意正负极)
2.标定电机与参数配置
使用USB转接模块连接上位机,首先完成对电机的标定,读取参数完成对如下参数的修改:
修改如下参数然后写入:加速度+10,减速度-10,电机的CAN ID配置均为2,CAN TIMEOUT 2000,过流0.8,电流环带宽为2000,其余不修改。
注:达妙电机采用达妙提供的上位机完成相应版本固件的更新,固件更新详情可咨询达妙淘宝客服。
3.膝关节电机的固定
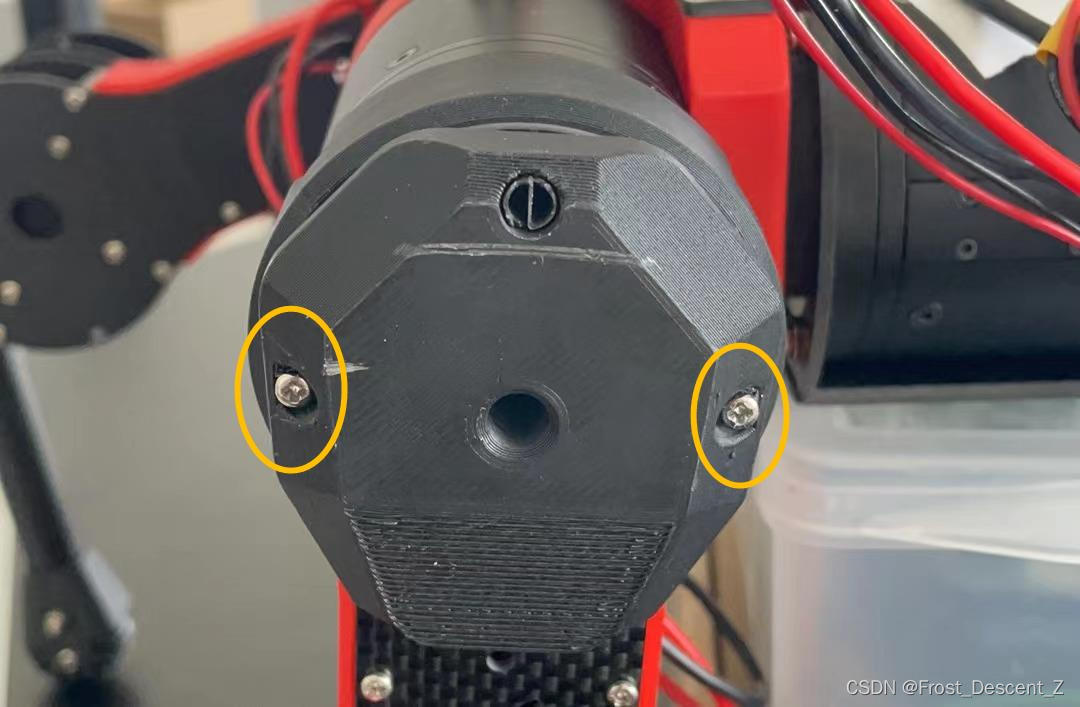
提前完成电机插头的连接以方便后续走线,将电机供电口朝向调整为机械臂内侧.完成膝关节电机的安装。

随后采用M2.5*5螺丝完成膝关节电机的固定

4.侧面装饰部件的安装
采用M2.3*5螺丝从背部固定侧面装饰3D打印件

5.支撑铝柱安装
安装支撑小铝柱,避开调试口
6.电机引线与上板的安装
先简单固定大腿轴处的圆形打印件,将延长的电机走线依据腿的方向从上引出
安装上板,采用M2.5*5螺丝(图中黄色圈标注)固定电机周围的铝柱,采用M2.3*5螺丝(图中蓝色圈标注)固定上板与侧面装饰打印件,采用M3*35螺丝(图中绿色圈标注)固定圆形打印件。
9.大腿臂与主机架的安装
依据同样的方法完成4个大腿臂的安装,最终配合主机架完成大腿的连接,注意需要增加对应的2.5mm厚度碳板垫片。
如遇孔位不符情况,请勿强行固定,尝试选取合适的螺丝即可,逐步拧紧各大腿链接螺丝使得大腿臂与电机平行紧密接触。

10.大腿装饰部件的安装
安装大腿装饰打印件,使用M3*16螺丝固定
11.阶段成品图
机械小腿
Tinymal-B采用内轴异形对称腿设计
1.小腿部件的安装
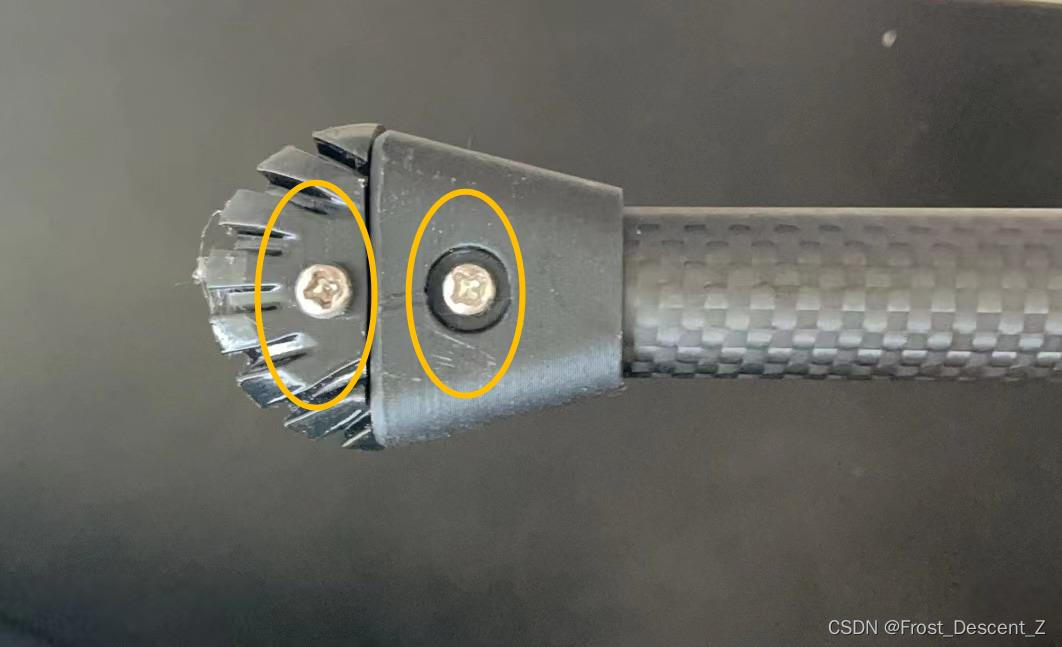
小腿部件的安装相对简单,每条小腿需要采用2个铝管夹,固定好相应的碳管,增加碳板垫片,安装两板支撑M2.5*22铝柱,采用M2.5*5螺丝固定。

2.足端部件的安装
给足端部件打上胶枪,插入橡胶固定零件,随后安装足端部件并采用M3*25螺丝固定。
3.机械小腿与电机的连接
连接机械小腿与电机,采用M3*16螺丝固定。

4.阶段成品图


















 1596
1596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











