









OnBoard API
MATRICE 100 被设计为可以使用遥控器、机载备和 移动 设备进行控制。如果遥控器让飞切换到 API控制模式,设备通过 Onboard API , Mobile API可以请求获得控制权。
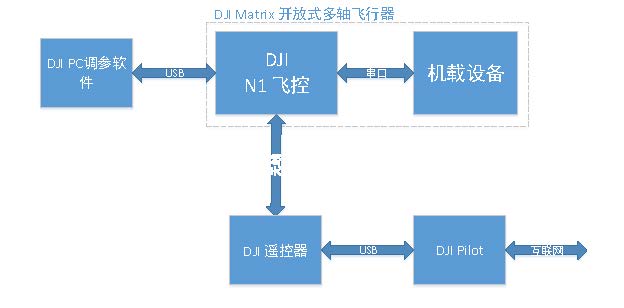
启用 API控制 之后 ,将遥控器模式开关置为中位 (F档)。
启动示例代码 启动示例代码 .
1. 编译 ROS package Onboard-SDK-ROS中的所用
2. 启动 roscore, 然后启动 然后启动rosbridge_server
<include file="$(find dji_sdk)/launch/sdk_manifold.launch" />- 通过代码中的launch 文件启动dji_sdk_node。
- 编辑 “sdk_keyboard_demo.html”, 把 url中的地址改成 Linux 系统 的主机名 或者 localhost (127.0.0.1)。
- 在浏览器 中打开 中打开 “sdk_keyboard_demo.html” rosbridge_server会显示有新的 client连接 上,否则请检查步骤 4中的设置 。此时 。此时 可以 在页面中读取到 飞行平台 的状态信 息。
User Manual
- 使用遥控器。
- 使用DJI GO App

















 867
867

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









