







NVIDIA® Jetson AGX OrinTM series (资料来源:nvidia-jetson-agx-orin-technical-brief.pdf)
1 整体介绍
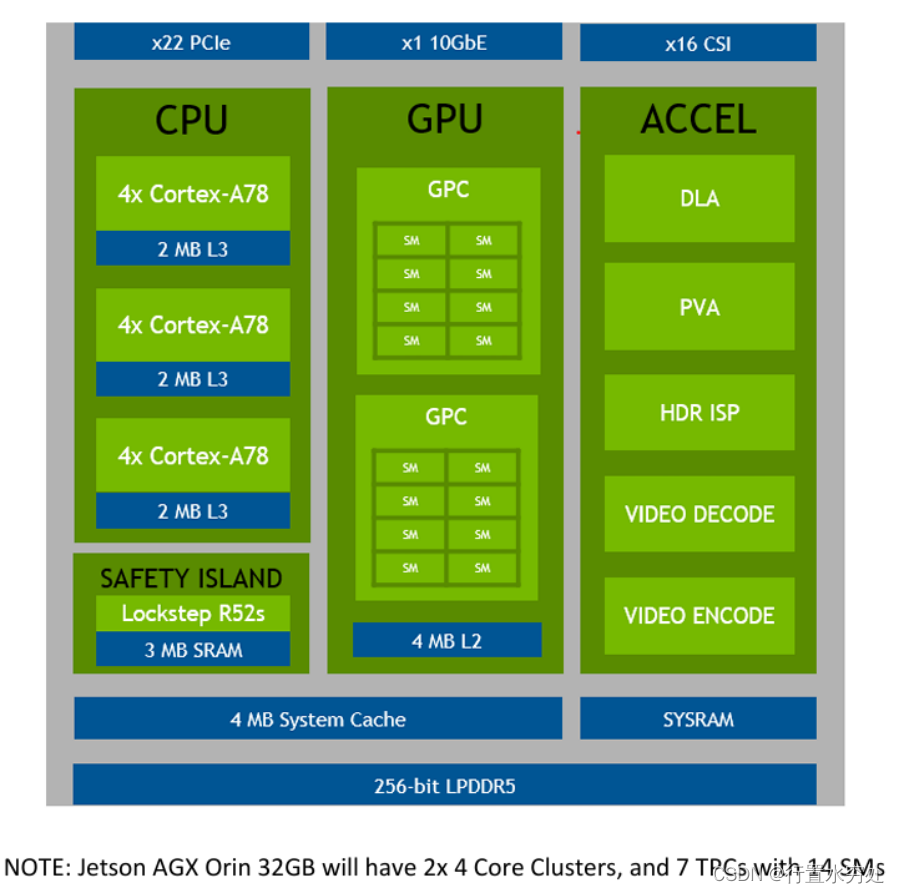
1) Orin SoC结构
Orin SoC,如下图所示,由一个NVIDIA Ampere architecture GPU, Arm® Cortex®-A78AE CPU, 下一代深度学习核视觉处理加速器, 视频编码器和视频解码器组成。
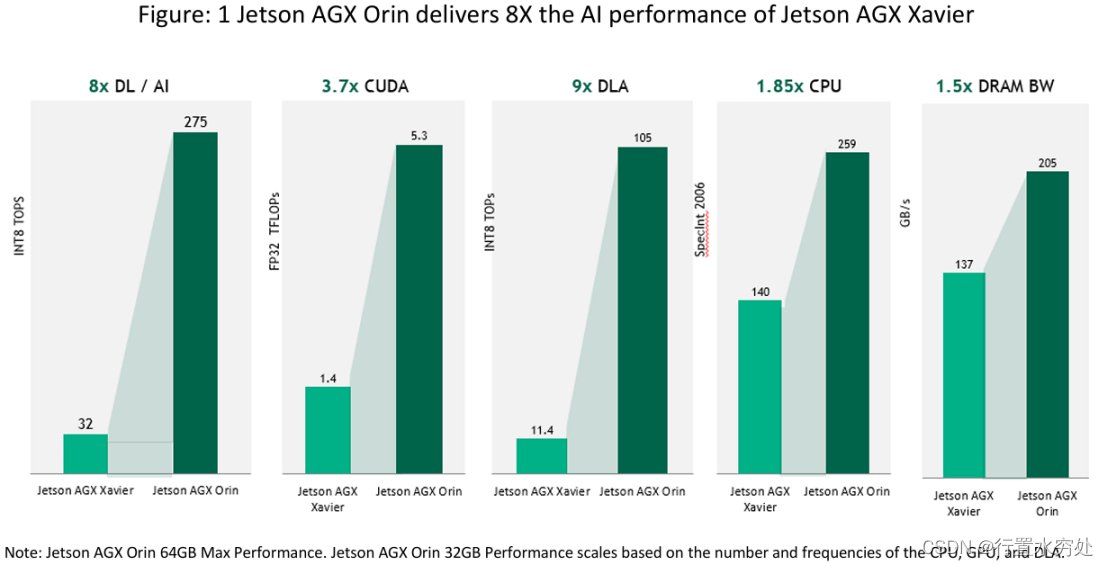
2) Orin和Xavier配置对比
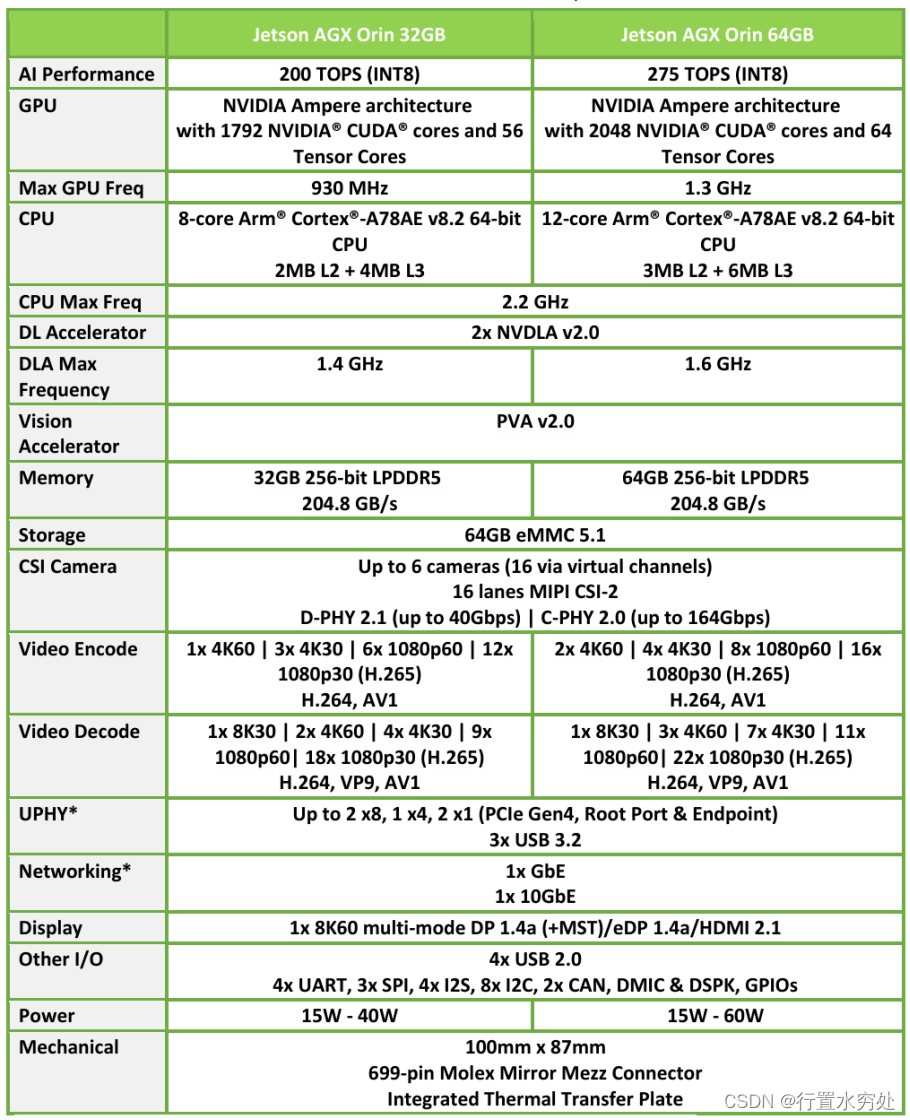
3) AGX ORIN分为32GB、64GB两种模块
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









