







本文为转载,原博客地址:http://blog.csdn.net/raym0ndkwan/article/details/50031729
算法笔记-卡尔曼滤波器简单解释
动态时间规整/规划(Kalman Filter, 又称linear quadratic estimation)也是一个比较老的算法,大概在1960年左右被提出来,算法的名字来自算法早期的一个提出者Rudolf E. Kálmán。卡尔曼滤波器至今还是十分常用的一种滤波算法,并且在此基础上发展出了很多种延伸的算法。卡尔曼滤波器算法的核心可由几道简洁的公式表示,但对于刚刚接触的人来说可能比较难以彻底理解这些公式,这篇笔记尝从一个实际的运动场景出发,具体解释卡尔曼滤波器的核心算法。
1.简介
卡尔曼滤波器在监控、导航和控制系统上有大量的运用。在这些系统里面,系统的观测量和这些被观测量的真实值往往是有细微差异的,基于我们对这些系统的认识(例如已有的描述系统的模型)和观测值,我们能够更好地推测系统的真实状态。这也是卡尔曼滤波器的核心思路,下面会先从公式出发,然后到一个简单的例子,进一步介绍这个思想是如何体现的。
2.公式
首先,假设一个系统在t时刻的状态是跟t-1时刻的状态是有关的:
其中各项的意义如下:
xt
是一个代表系统在t时刻的真实状态向量,该向量可以包含着例如位置,速度等信息;
Ft
是t时刻的状态转换矩阵,代表着系统状态在t-1时刻对系统t时刻的影响,例如t-1时没有速度和加速度,那么在t时位置应该不变;
ut
是t时刻的控制输入向量,例如是否有踩油门和转方向盘等;
Bt
是t时刻的输入转换矩阵,即量化了输入对状态的影响;
wt
是t时刻的过程噪声,我们假设该噪声服从均值为0的多变量正态分布,其协方差矩阵我们标记为
Qt
。
然后,我们要留意到,我们观察或测量的值往往不能直接反应我们关心的状态值,而且测量也存在测量误差,我们用下面这一式子反应这些:
其中各项的意义如下:
zt
代表系统在t时刻的观察值向量,该向量包含着系统测量的结果;
Ht
是t时刻的测量转换矩阵,这个矩阵表示状态向量和观察值向量之间的关系,当观察值就是状态时,该矩阵为单位矩阵;
vt
是t时刻的测量误差,类似过程噪声,我们假设该误差服从均值为0的多变量正态分布,其协方差矩阵我们标记为
Rt
。
卡尔曼滤波器要解决的问题,或者说将式子(1)和(2)简单概括一下,就是已知
Ft
,
ut
,
Bt
,
zt
,
Ht
,
xt−1
并且
wt
与
vt
服从已知的正态分布1,求解
xt
。
我们首先假设所求状态服从一个多变量的正太分布,即
x∼N(μ,Σ)
。然后卡尔曼滤波器是通过一个迭代的过程解决这个问题的,每一次迭代包含两步,分别是预测和观测两步。
第一步预测:
此处出现的几个新的项:
首先是带帽的状态量
x^
,主要用于与真实值区分开,这个值是卡尔曼滤波器的运算结果,即我们的对状态量的估计值。从另一个角度讲,这个就是我们估测的
μ
。
而
P
是一个协方差矩阵,也就是我们估计的
Σ
。
其中
t|t−1
指的是
t
时刻的预测步的结果,而
t−1|t−1
指的是
t−1
时刻的观测步的结果。
第二步观测:
其中
Kt
是卡尔曼增益:
以上就是卡尔曼滤波器的核心公式(式子(3)至式子(7)),注意,尽管对于标量问题也适用,这里讨论的变量大多是向量或者矩阵,而非标量。简单说来就是,每一次迭代分两步,在预测步状态(可用一个正态分布描述)的均值和协方差根据系统的模型更新,在观察步状态的均值和协方差根据观察值更新。
3.例子
光看公式可能会比较难以理解,我们现在考虑一个具体的例子。
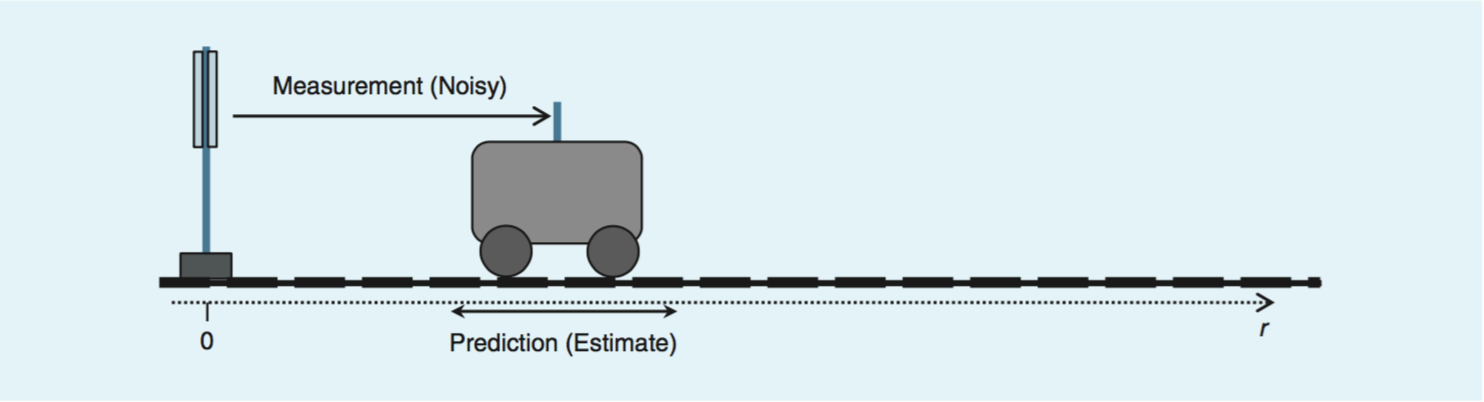
假设一辆列车在一维的铁轨上运动,如上图。假设我们关心的是列车相对于0点的位置和其速度,那么
xt
可以表示为:
其中 xt 为位置, x˙t w为速度。
假设 t 时刻,我们已知火车的推进力为 ft 且火车的质量为 m ,那么控制输入向量为:
同时,用 Δt 表示 t 时刻与 t−1 时刻间的时间差,由经典力学(对于这个系统的模型)我们可以知道:
以上只是简单的标量物理运算,我们可以整理为矩阵的形式:
将上式与式子(3)比较,可以看到:
式子(3)实际上就表达了以上过程,所以式子(3)并没有什么神奇,只是基于系统模型的状态的均值的更新。但是,跟式子(1)相比,我们忽略了过程噪声项,因为这个会在式子(4)里面有所体现。式子(4)更新了协方差,协方差代表着我们对我们当前的预测的信心。
按照定义,协方差是:
上式中E代表求均值运算。对比式子(3)和式子(1),我们有:
将上式代入协方差的定义中:
并化简,得:
这里面有四项均值,由于过程噪声和状态预估误差不相关,所以其中两项为0:
又因为 E[wtwTt] 实际上是过程误差的协方差的定义,所以上式可以被进一步化简为:
上式即是式子(4)。
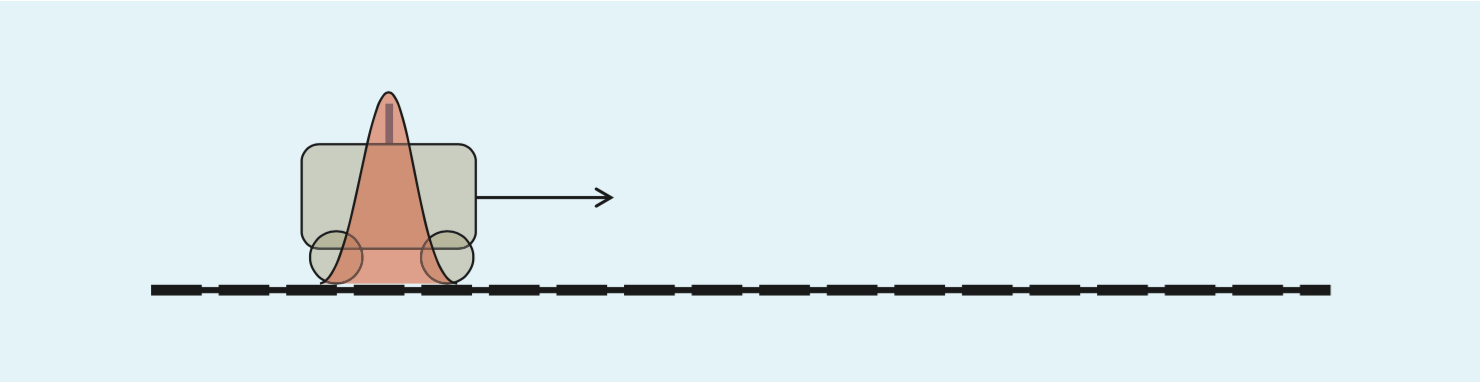
如果只有这一步,而没有第二步(即没有实时测量数据),那么我们对状态预估的信息也会下降(因为有过程噪声)。如下两图所示,其中红色的分布代表着我们预测的位置的分布,在火车运行一段时间后,我们对其位置估测会更加分散扁平在均值的周围。

要使用卡尔曼滤波器,必须得有观测输入,例如下图:
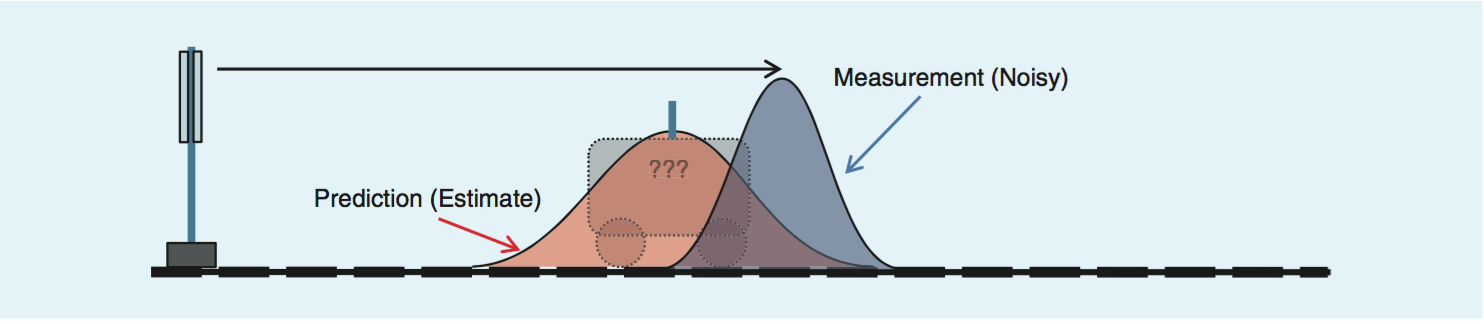
假设给定两个序列,样本序列 X=(x1,...,xN) 和测试序列 Y=(y1,...,yN) ,同时给定一个序列中点到点的距离函数 d(i,j)=f(xi,yj)≥0 (一般为欧氏距离,实际上也可以是别的函数)。蓝色的分布表示着我们用激光测距仪测出的列车的位置,同时它的扁平程度也代表了我们对测量结果的信心。
卡尔曼滤波器的测量步实际上把上图的两个分布结合起来,换句话说,将观测值和预测值结合起来才是一个更好的结果。由于预测和测量都服从正态分布,卡尔曼滤波器可以进一步利用这一点。下面用位置状态作为例子来解释算法的观测步的式子(5)(6)(7)。
如果我们只考虑位置而不考虑速度,将预测和测量正太分布的相乘,仍然会得到正太分布。例如 xp 代表着图中红色的预测, xm 代表着图中蓝色的观测,那么我们有:
将两者融合:
将其整理一下,可以看到:
且:
又:
下图绿色部分就是融合后的位置的分布:

如果我们将融合后的分布的均值和方差与式子(5)(6)(7)对比,可以发现卡尔曼增益在这个例子里就是 σ21σ21+σ22 (此处测量的目标即为观测的状态所以测量转换矩阵为单位矩阵,可以忽略)。
至此,卡尔曼滤波器的基本推导已经完成。
4.简单讨论
这个只是一个非常简化的例子,有很多问题没有展开,例如何时卡尔曼滤波器给出的结果才是最优的和为什么是最优的。这里只讨论几个简单的问题。
卡尔曼增益的意义
在上面的例子中, σ21σ21+σ22 是卡尔曼增益,我们可以看到它其实是对预测和测量准确性的一个比重。如果我们对于预测的信心相对大,卡尔曼增益就会偏小(接近0),反之,如果我们对于观测的信心相对大,卡尔曼增益就会相对偏大(接近1)。
观察式子(5)和(6)可以发现,当卡尔曼增益偏小时,观测步的结果偏向于接近预测步的结果(观测结果被更大程度地忽略),而卡尔曼增益偏大时,观测步的结果则更多取信于观测到的距离。
简单说来,卡尔曼滤波器会选择性地考虑预测和观测的可信程度,并会体现在观测步的输出上。
协方差/方差
实际上,在很多情况下,我们并不能确定观测或者预测的协方差。例如在上面这个例子里面,如何知道蓝色分布(观测)的方差?也许可以通过信号的噪声和浮动的幅度来确定,但在很多场景里,这个不见得很容易,我们需要有一些合理的假设。
效果
整体说来,卡尔曼滤波器的效果是能够使观测的状态更加平滑,去除毛刺。
References
1.Faragher, Ramsey. “Understanding the basis of the Kalman filter via a simple and intuitive derivation.” IEEE Signal processing magazine 29.5 (2012): 128-132.
- 这个其实并不必要,但为了简化模型可以先这样假设。 ↩















 9万+
9万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









