







聚类
Clustering
原型聚类
Prototype-based Clustering
k均值
k-means
-
Key Idea
-
随机选择 k k k个样本作为簇中心(簇均值向量),分别计算其余样本与 k k k个簇中心的距离进而确定样本的簇标记,接着重新根据当前划分结果计算新的簇中心,迭代直至收敛
-
聚簇中心不一定为数据样本点
-
-
k-means目标:最小化平方误差
E = ∑ i = 1 k ∑ x ∈ C i ∥ x − μ i ∥ 2 2 E=\sum_{i=1}^{k} \sum_{\boldsymbol{x} \in C_{i}}\left\|\boldsymbol{x}-\boldsymbol{\mu}_{i}\right\|_{2}^{2} E=i=1∑kx∈Ci∑∥x−μi∥22

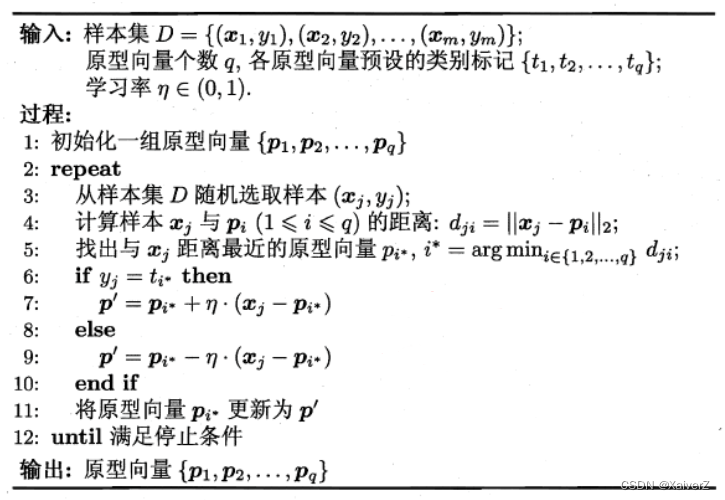
学习向量量化
Learning Vector Quantization,LVQ
-
LVQ假设数据样本带有类别标记,学习过程利用样本的这些监督信息来辅助聚类
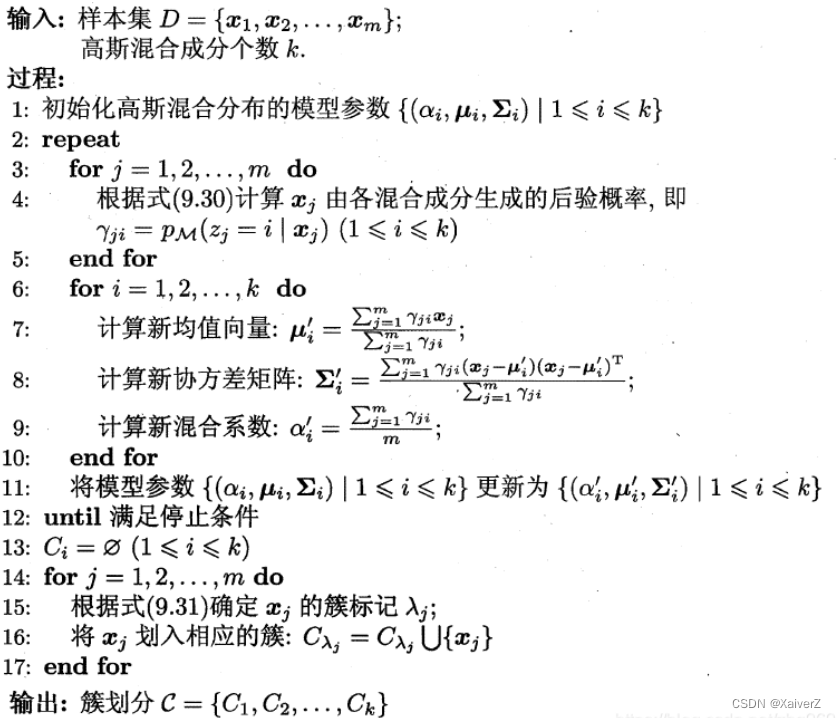
高斯混合聚类
Mixture-of-Gaussian
密度聚类
Density-based Clustering
Canopy
Canopy
-
Overview
-
Canopy属于一种粗粒度(Coarse-grained)的聚类算法,它使用一种简单、快捷的距离计算方式将数据集分为若干可重叠的子集,这种算法不需要指定 k k k值、但精度较低,可以结合K-means算法一起使用:先由Canopy算法进行粗聚类得到 k k k个质心,再使用K-means算法进行聚类
-
聚簇中心一定为数据样本点
-
-
算法
-
将原始数据组织成列表 L = [ x 1 , x 2 , x 3 , . . . , x n ] L=[x_1, x_2, x_3, ..., x_n] L=[x1,x2,x3,...,xn],设定超参数 T 1 T_1 T1和 T 2 T_2 T2且 T 1 > T 2 T_1 > T_2 T1>T2
-
从列表 L L L中随机选取一个样本作为第一个Canopy的质心,并将其从列表 L L L中删除
-
从列表 L L L中随机选取一个样本 Q Q Q,计算其到所有质心的距离,考察其中的最小距离 D D D(重复执行该步)
-
若 T 2 < D < = T 1 T_2<D<=T_1 T2<D<=T1,则给 Q Q Q一个弱标记,表示 Q Q Q属于该Canopy,并将 Q Q Q加入其中(不从 L L L中删除 Q Q Q)
-
若 D < = T 2 D<=T_2 D<=T2,则给 Q Q Q一个强标记,表示 Q Q Q属于该Canopy,且和质心非常接近,所以将该Canopy的质心设为所有强标记样本的中心位置,并将 Q Q Q从列表 L L L中删除
-
若 D > T 1 D>T_1 D>T1,则 Q Q Q形成一个新的聚簇,并将 Q Q Q从列表 L L L中删除
-
-
DBSCAN
Density-Based Spatial Clustering of Applications with Noise
-
Overview
-
相对于K-means类算法来说,DBSCAN无需预先指定簇个数
-
最终聚类簇个数不确定
-
聚簇中心一定为数据样本点
-
-
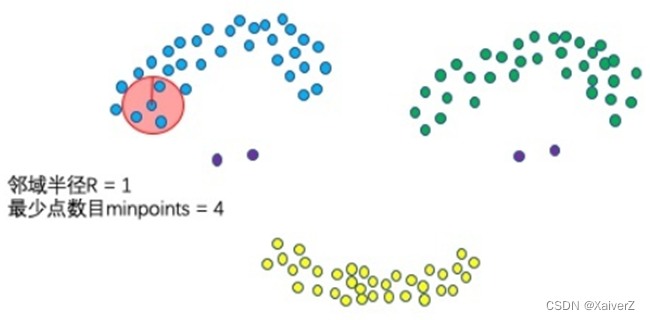
两个超参数
-
邻域半径:Eps
-
最少点数目:MinPts
-
-
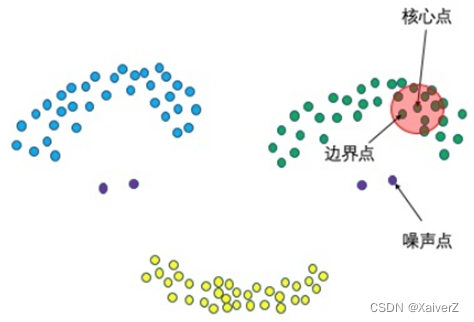
三种点类别
-
核心点:邻域范围内点数量大于最少点数目(Minpoints)
-
边界点:不属于核心点但在某个核心点的邻域内
-
噪声点:其余点
-
-
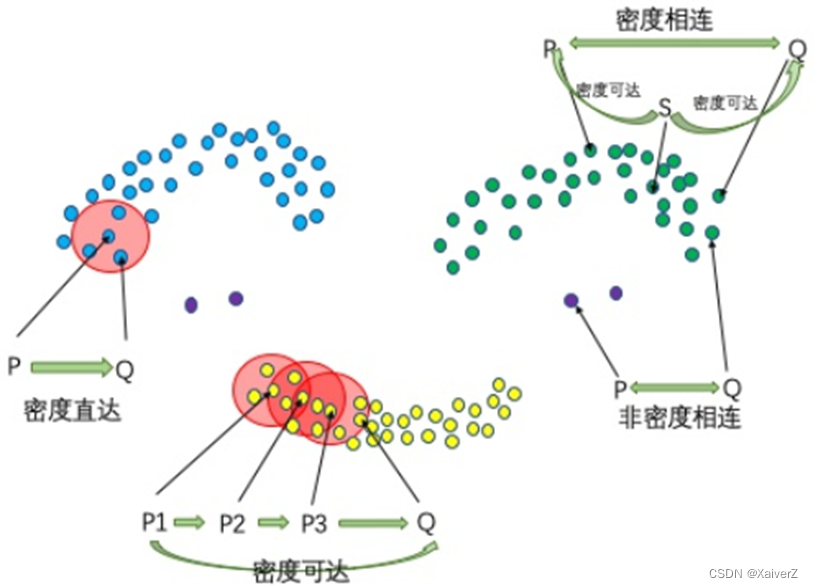
四种点关系
-
密度直达:核心点到其邻域范围内的任意点是密度直达的
- 不对称( P P P密度直达 Q Q Q,但 Q Q Q不一定密度直达 P P P,因为密度直达要求密度直达发起者必须为核心点,到达点为其邻域内一点,而 Q Q Q不一定为核心点)
-
密度可达:由多个链式密度直达定义( P 1 P_1 P1密度直达 P 2 P_2 P2, P 2 P_2 P2密度直达 P 3 P_3 P3, P 3 P_3 P3密度直达 Q Q Q,则 P 1 P_1 P1密度可达 Q Q Q)
- 不对称
-
密度相连:若存在一个核心点 S S S,使 S S S到 P P P和 Q Q Q都密度可达,则 P P P与 Q Q Q密度相连
- 对称
-
非密度相连:除了上述三种关系之外
-
-
算法
-
从数据集中任意选取一个数据对象点 p p p
-
如果对于参数Eps和MinPts,所选取的数据对象点 p p p为核心点,则找出所有从 p p p密度可达的数据对象点,形成一个簇
-
如果选取的数据对象点 p p p不是核心点,则选取另一个数据对象,回到上一步
-
重复前两步,直到所有点都被处理
-
-
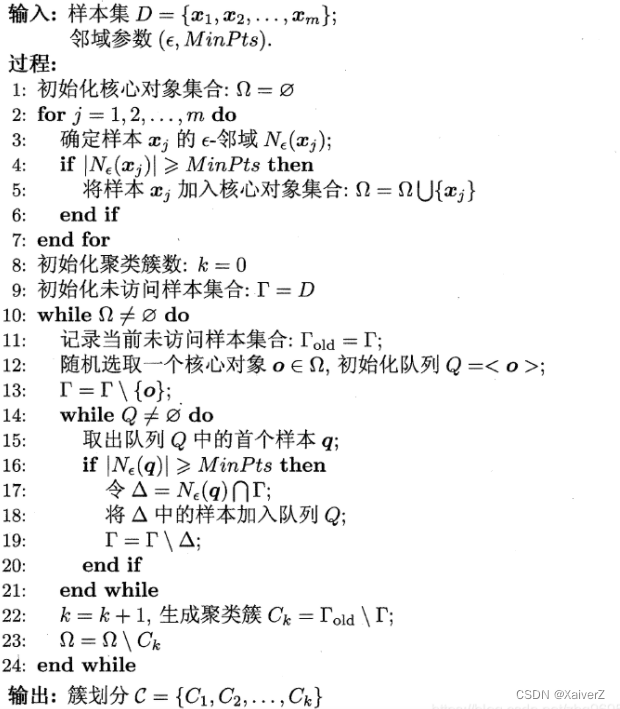
伪码
-
优势
-
无需指定聚类簇数
-
对异常点不敏感(一些扰动包可丢弃)
-
-
缺陷
- 对密度敏感。若数据密度分布不均匀效果差
OPTICS
Ordering Point To Idenfy the Cluster Structure
-
Key Insight
- 针对DBSCAN无法适应数据密度不均匀的情况进行了改进,在DBSCAN的基本概念中又扩充了一些概念
-
两个距离
-
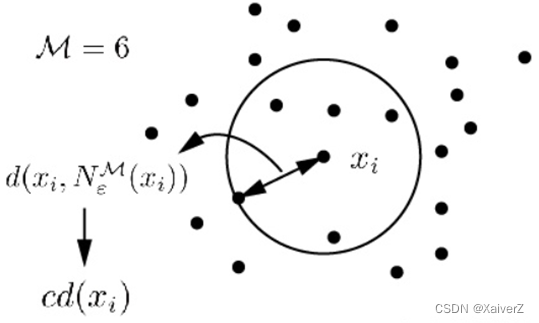
核心距离:对于给定的最少点个数,使某个数据点 x i ∈ X x_i \in X xi∈X成为核心点的最小邻域半径为 x i x_i xi的核心距离
c d ( x i ) = { UNDEFINED, if ∣ N ε ( x i ) ∣ < M d ( x i , N ε M ( x i ) ) , otherwise c d\left(x_{i}\right)= \begin{cases}\text { UNDEFINED, } & \text { if }\left|N_{\varepsilon}\left(x_{i}\right)\right|<\mathcal{M} \\ d\left(x_{i}, N_{\varepsilon}^{\mathcal{M}}\left(x_{i}\right)\right), & \text { otherwise }\end{cases} cd(xi)={ UNDEFINED, d(xi,NεM(xi)), if ∣Nε(xi)∣<M otherwise
-
可达距离
r d ( x j , x i ) = { UNDEFINED, if ∣ N e ( x i ) ∣ < M max { c d ( x i ) , d ( x i , x j ) } , otherwise r d\left(x_{j}, x_{i}\right)= \begin{cases}\text { UNDEFINED, } & \text { if }\left|N_{e}\left(x_{i}\right)\right|<\mathcal{M} \\ \max \left\{c d\left(x_{i}\right), d\left(x_{i}, x_{j}\right)\right\}, & \text { otherwise }\end{cases} rd(xj,xi)={ UNDEFINED, max{cd(xi),d(xi,xj)}, if ∣Ne(xi)∣<M otherwise
N e ( x i ) N_{e}(x_i) Ne(xi)为 x i x_i xi在邻域半径 e e e范围内的点集合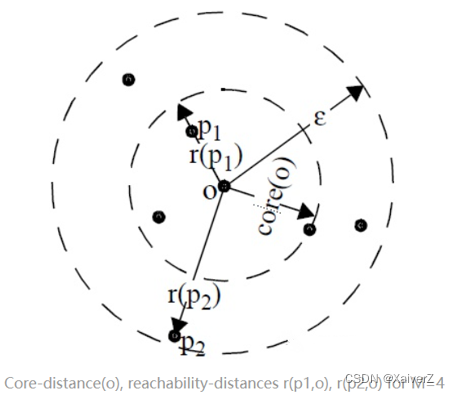
-
-
算法
已知原始数据队列 D D D,创建两个新队列:有序队列和结果队列。有序队列用来存储核心点的密度直达对象,并按其与核心点的可达距离升序排列;结果队列用来存储样本点的输出次序。可以把有序队列里面存放的数据点理解为待处理数据,而结果队列里放的是已经处理完的数据
-
若样本集 D D D中所有数据均处理完毕,则算法结束。选择一个未处理(即不在结果队列中)且为核心点的样本,找到其所有密度直达的点,如果这些密度直达的样本点不存在于结果队列中,则将其放入有序队列中,并按与核心点的可达距离排序
-
若有序队列为空,则返回上一步重新选取数据点。否则,从有序队列中取出第一个样本点(即可达距离最小的样本点)进行进一步处理,并将取出的样本点保存至结果队列中(如果它不存在于结果队列当中的话),进行下述处理
-
判断取出的点是否为核心点,若不是,返回上一步重新从有序队列中选取数据点;若为核心点,则继续找到该点的所有密度直达点,进行处理
-
若密度直达点已存在于结果队列中,则不处理;否则下一步
-
如果有序队列中已经存在该密度直达点,若此时新的可达距离小于旧的可达距离(注意此处的可达距离指的是某点相对于两个核心点的可达距离),则用新可达距离取代旧可达距离,并将有序队列重新排序(因为一个对象可能由多个核心点密度直达,因此,可达距离近的肯定是更好的选择)
-
如果有序队列中不存在该密度直达点,则插入该点,并对有序队列重新排序
-
-
-
迭代上述两步
-
算法结束,输出结果队列中的有序样本点
-
-
核心思想
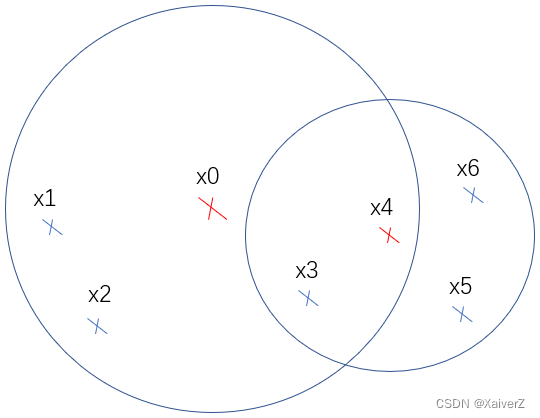
若一个点可由多个核心点密度直达,那么这个点更应该属于可达距离更近的那个核心点
-
假设算法开始,选中 x 0 x_0 x0核心点,找出其所有密度直达的点并加入有序队列排序 [ x 4 , x 1 , x 2 , x 3 ] [x_4, x_1, x_2, x_3] [x4,x1,x2,x3]
-
接下来取出有序列表第一个点 x 4 x_4 x4。由于 x 4 x_4 x4也为核心点,故找出其所有密度直达的点 x 3 , x 5 , x 6 x_3, x_5, x_6 x3,x5,x6,并对其进行处理
-
选中 x 3 x_3 x3,不存在结果队列,但已存在于有序队列中。假设 r d ( x 3 , x 0 ) > r d ( x 3 , x 4 ) rd(x_3,x_0) > rd(x_3,x_4) rd(x3,x0)>rd(x3,x4),即新的可达距离小于旧的可达距离,故使用新距离替代旧距离,重新对有序列表排序 [ x 4 , x 3 , x 1 , x 2 ] [x_4, x_3, x_1, x_2] [x4,x3,x1,x2]
-
有序列表的这种变化说明了OPTICS的核心思想,若一个样本点可由多个核心点密度直达,那么这个点更应该属于可达距离更近的那个核心点。表现在有序列表上就是 x 3 x_3 x3更靠近 x 4 x_4 x4了,在输出时两者自然更靠近,属于同一簇的概率更大
-
-
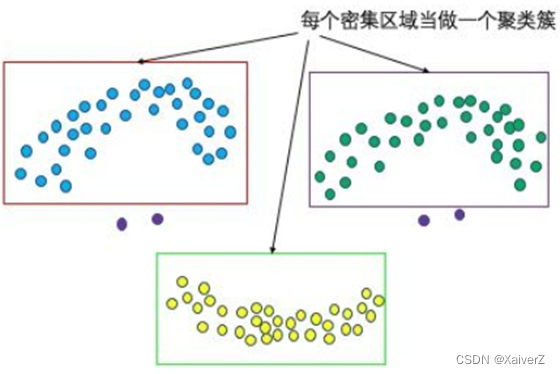
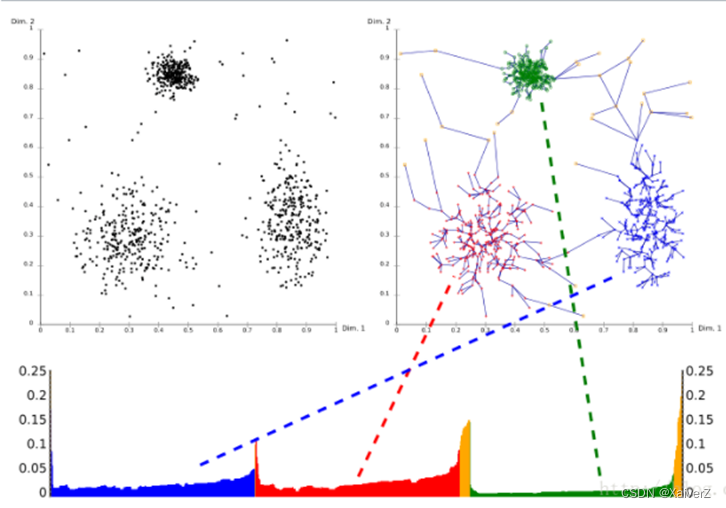
Example
横坐标为输出样本点的次序,纵坐标为可达距离
-
“凹陷”越深,说明该聚簇越紧密
-
从下图可以看出,三个聚簇的密度分布不均匀,上方聚簇的密度比下方两个聚簇的密度要大。若使用DBSCAN算法进行聚类,采用和上方聚簇密度相当的邻域半径与最小点数目设置,则在聚类是虽然对上方聚簇的效果较好,但对下方两个聚簇的效果就很差(甚至很难找到核心点,因为密度比上方聚簇小很多)
-
层次聚类
Hierarchical Clustering
- 自底向上 or 自顶向下
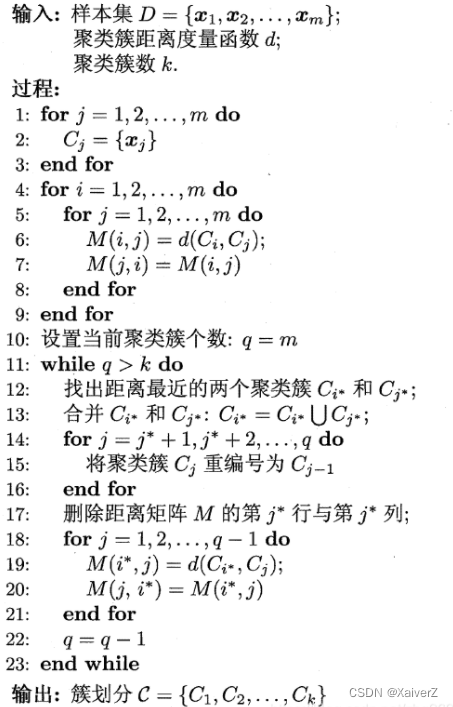
AGNES
自底向上层次聚类
-
先将数据集中的每个样本看作一个初始聚类簇,然后在算法运行的每一步中找出距离最近的两个聚类簇进行合并,该过程不断重复,直到达到预设的聚类簇个数
-
簇间度量
-
最小距离
d min ( C i , C j ) = min x ∈ C i , z ∈ C j dist ( x , z ) d_{\min }\left(C_{i}, C_{j}\right)=\min _{\boldsymbol{x} \in C_{i}, \boldsymbol{z} \in C_{j}} \operatorname{dist}(\boldsymbol{x}, \boldsymbol{z}) dmin(Ci,Cj)=x∈Ci,z∈Cjmindist(x,z)
单链接(Single-linkage) -
最大距离
d max ( C i , C j ) = max x ∈ C i , z ∈ C j dist ( x , z ) d_{\max }\left(C_{i}, C_{j}\right)=\max _{\boldsymbol{x} \in C_{i}, \boldsymbol{z} \in C_{j}} \operatorname{dist}(\boldsymbol{x}, \boldsymbol{z}) dmax(Ci,Cj)=x∈Ci,z∈Cjmaxdist(x,z)
全链接(Complete-linkage) -
平均距离
d avg ( C i , C j ) = 1 ∣ C i ∣ ∣ C j ∣ ∑ x ∈ C i ∑ z ∈ C j dist ( x , z ) d_{\operatorname{avg}}\left(C_{i}, C_{j}\right)=\frac{1}{\left|C_{i}\right|\left|C_{j}\right|} \sum_{\boldsymbol{x} \in C_{i}} \sum_{z \in C_{j}} \operatorname{dist}(\boldsymbol{x}, \boldsymbol{z}) davg(Ci,Cj)=∣Ci∣∣Cj∣1x∈Ci∑z∈Cj∑dist(x,z)
均链接(Average-linkage)
-














 2635
2635











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









