







主页传送门:📀 传送
概述
在现代交通系统中,借道绕行是一种常见的交通管理策略,用于解决交通拥堵、优化路网结构等问题。为了确保借道绕行策略的有效性和安全性,需要对其进行场景仿真调试。
目的:
- 了解全局配置参数对车辆规划的影响
- 熟悉Apollo软件系统工作流程,掌握系统调试工具的Cyber_monitor使用
- 掌握通过仿真对Apollo软件代码的仿真调试方法
- 熟悉Planing模块参数配置及调试方法
仿真目标与需求
在进行借道绕行场景仿真调试之前,首先需要明确仿真的目标和需求。
-
仿真目标:例如,评估借道绕行策略对交通流量、通行能力、拥堵程度等的影响;验证借道绕行策略的安全性和可行性等。
-
仿真需求:例如,需要考虑的交通参与者类型(如轿车、卡车、公交车等);需要考虑的道路类型(如城市道路、高速公路等);需要考虑的交通控制设备(如信号灯、可变信息牌等)等。
模型构建与数据准备
根据仿真目标和需求,选择合适的交通仿真软件(如VISSIM、SUMO等),并构建相应的交通模型。
-
路网模型:根据实际道路网络,构建相应的路网模型,包括道路段、交叉口、车道等元素。
-
交通参与者模型:根据实际交通参与者的类型和特性,构建相应的交通参与者模型,包括速度、加速度、换道行为等参数。
-
交通控制设备模型:根据实际交通控制设备的类型和功能,构建相应的交通控制设备模型,包括信号灯时序、可变信息牌显示内容等参数。
-
借道绕行策略模型:根据实际借道绕行策略的规则和条件,构建相应的借道绕行策略模型,包括允许借道的区域、时间窗口、优先级等参数。
在模型构建完成后,需要准备相应的仿真数据,包括:
-
交通流量数据:包括各路段的车流量、车型比例等信息。
-
道路几何数据:包括各路段的长度、宽度、曲率等信息。
-
交通控制设备设置数据:包括信号灯时序、可变信息牌显示内容等信息。
-
借道绕行策略参数:包括允许借道的区域、时间窗口、优先级等信息。
仿真实验与结果分析
根据准备好的模型和数据,进行借道绕行场景仿真实验。在实验过程中,可以观察以下方面的指标:
-
交通流量:评估借道绕行策略对各路段交通流量的影响。
-
通行能力:评估借道绕行策略对各路段通行能力的影响。
-
拥堵程度:评估借道绕行策略对各路段拥堵程度的影响。
-
安全性:评估借道绕行策略对交通事故发生率的影响。
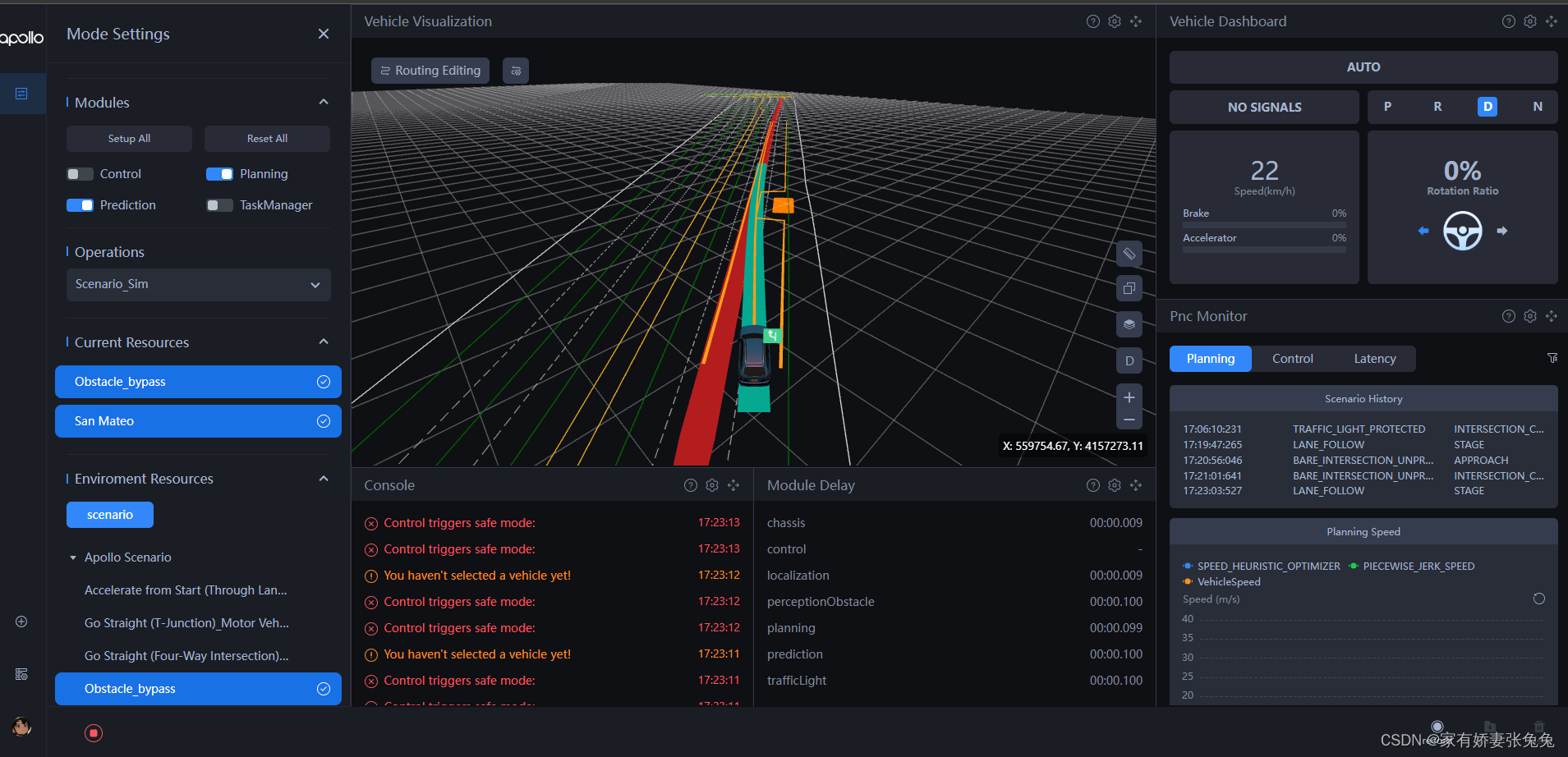
启动仿真环境
aem bootstrap start --plus
运行成功如下图所示:
- 单击上方 Dreamview 按钮进入 Dreamview 界面:
-
DreamView 运行成功界面
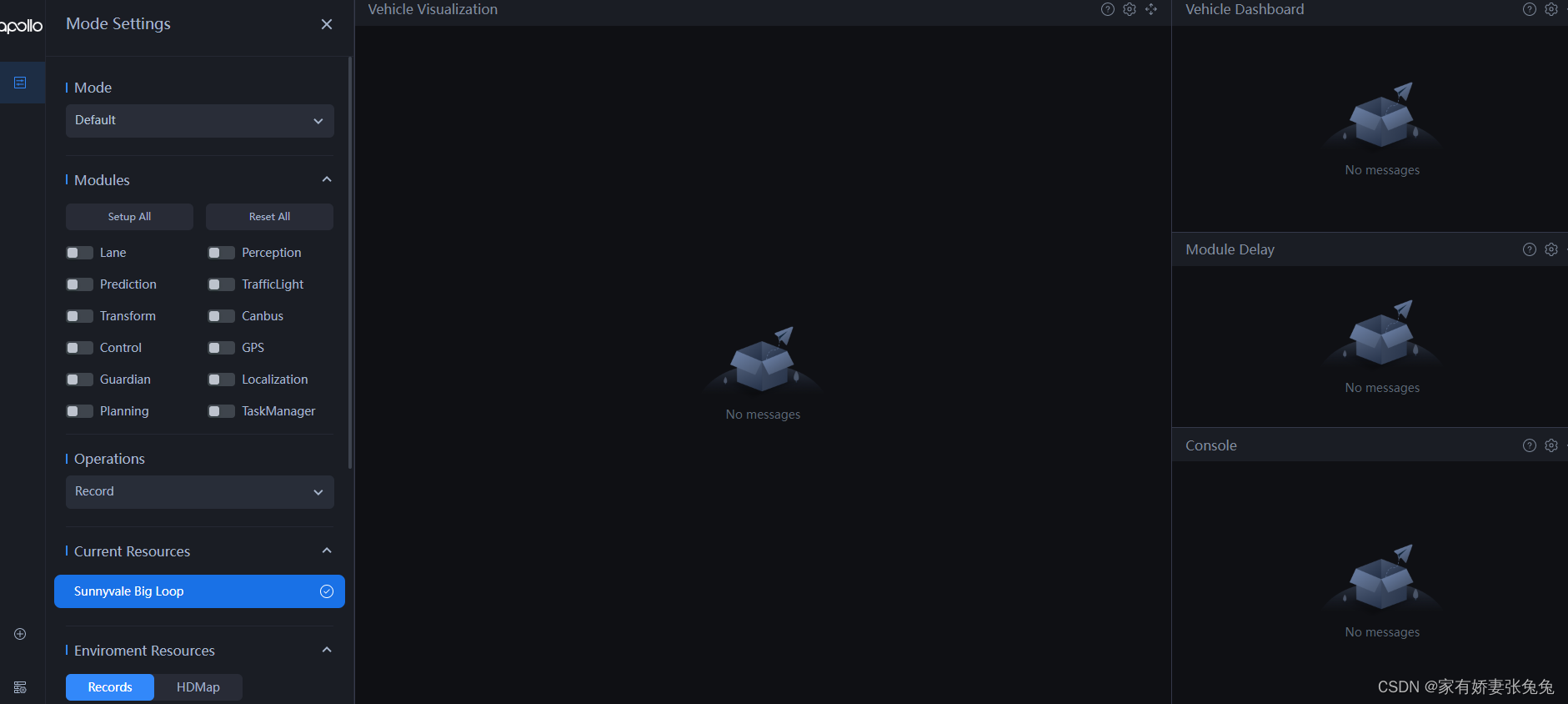
-
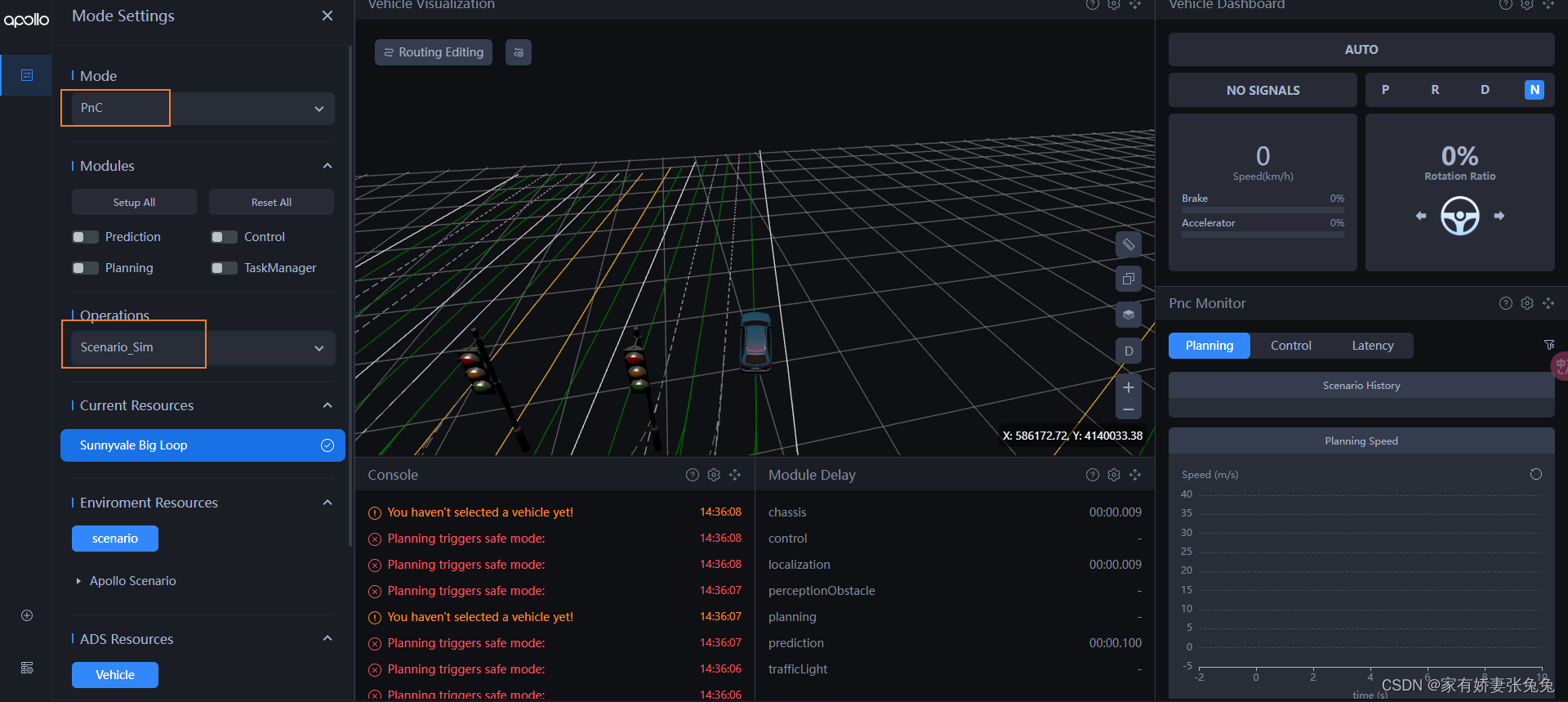
左侧导航栏打开
Mode Setting面板,模式选择PnC Mode,操作选择Scenario_Sim,进入场景仿真。
-
从左侧Modules模块种启动
Planning,Prediction
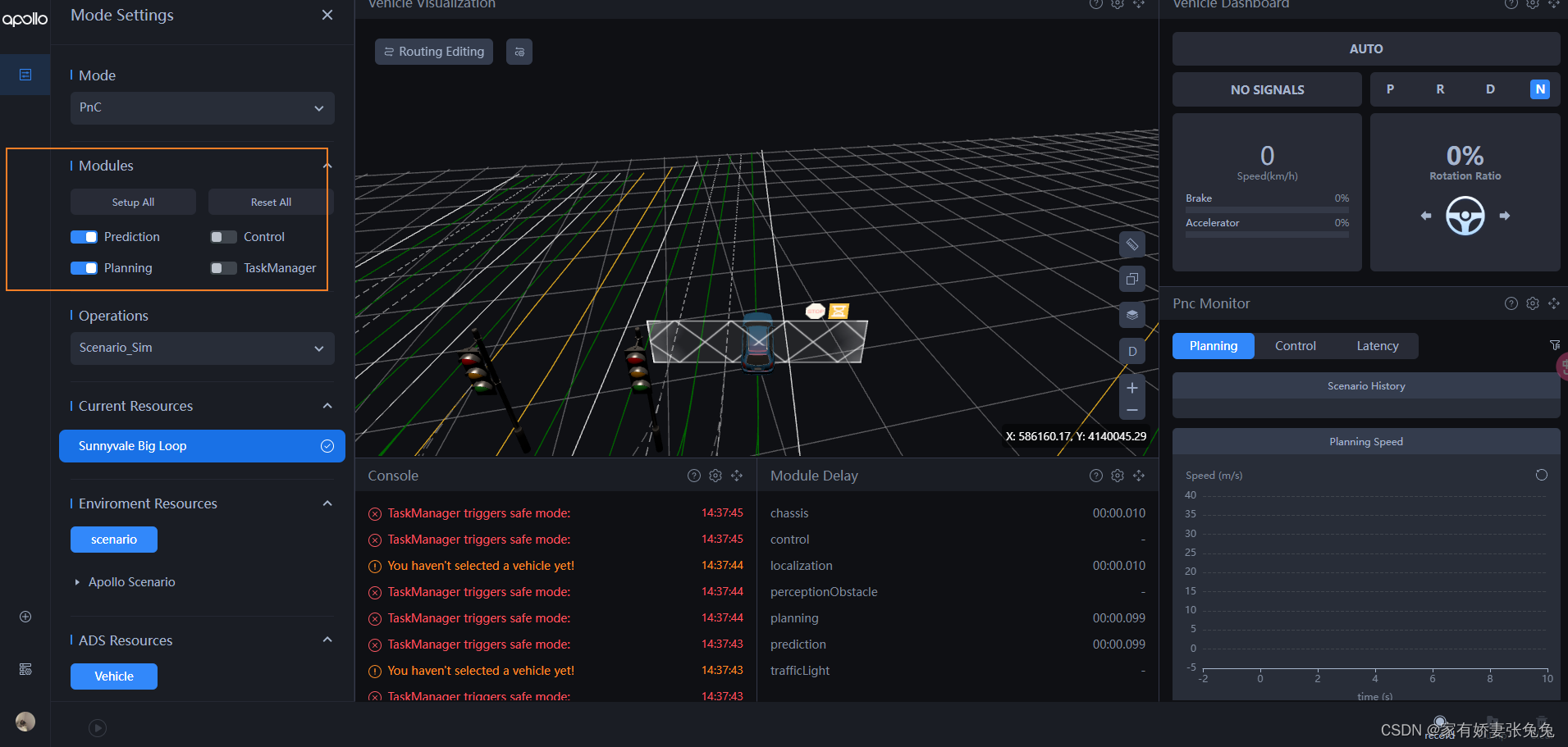
-
打开Rescource Manager,找到借道场景集,下载,关闭Resource Manager(如已下载可跳过此步骤)
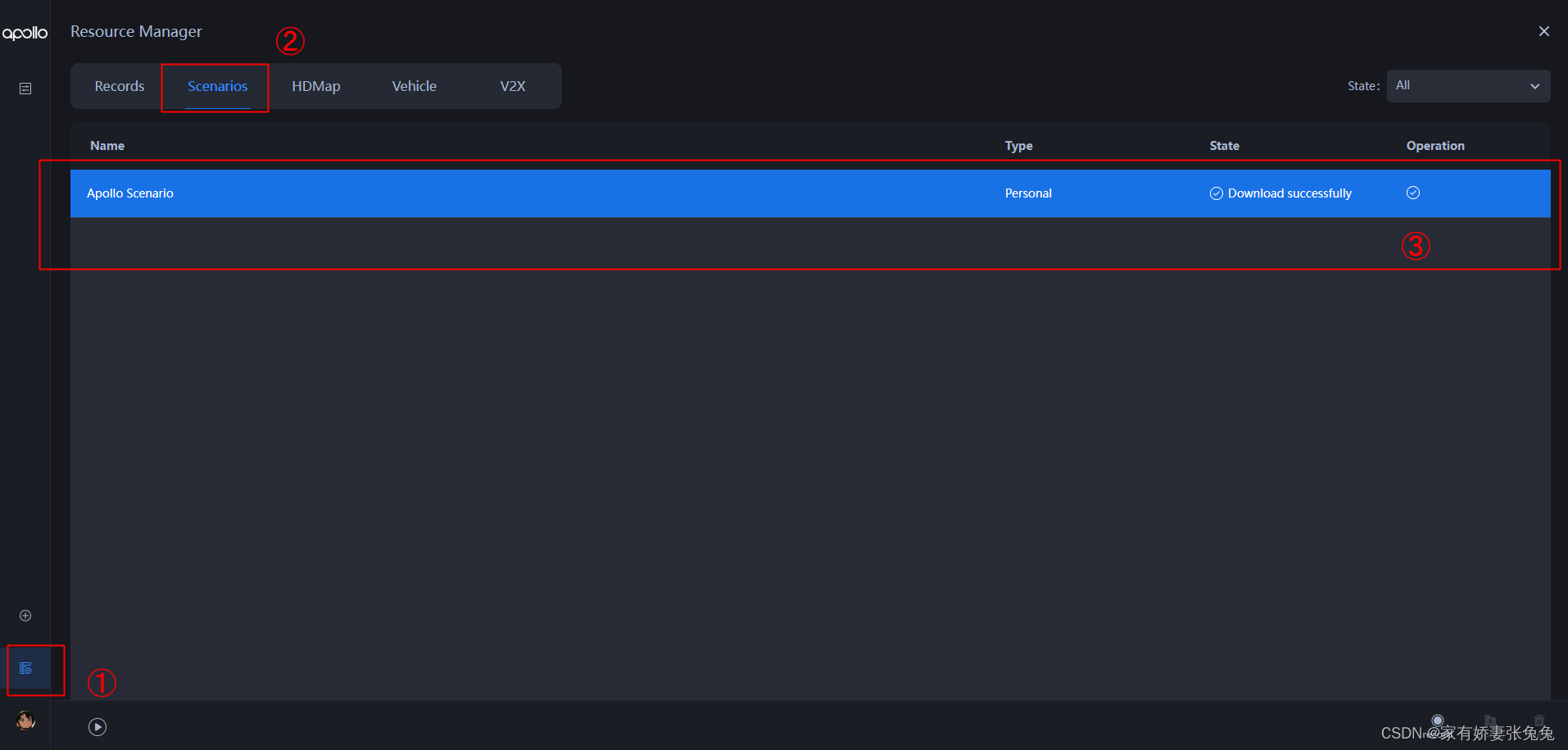
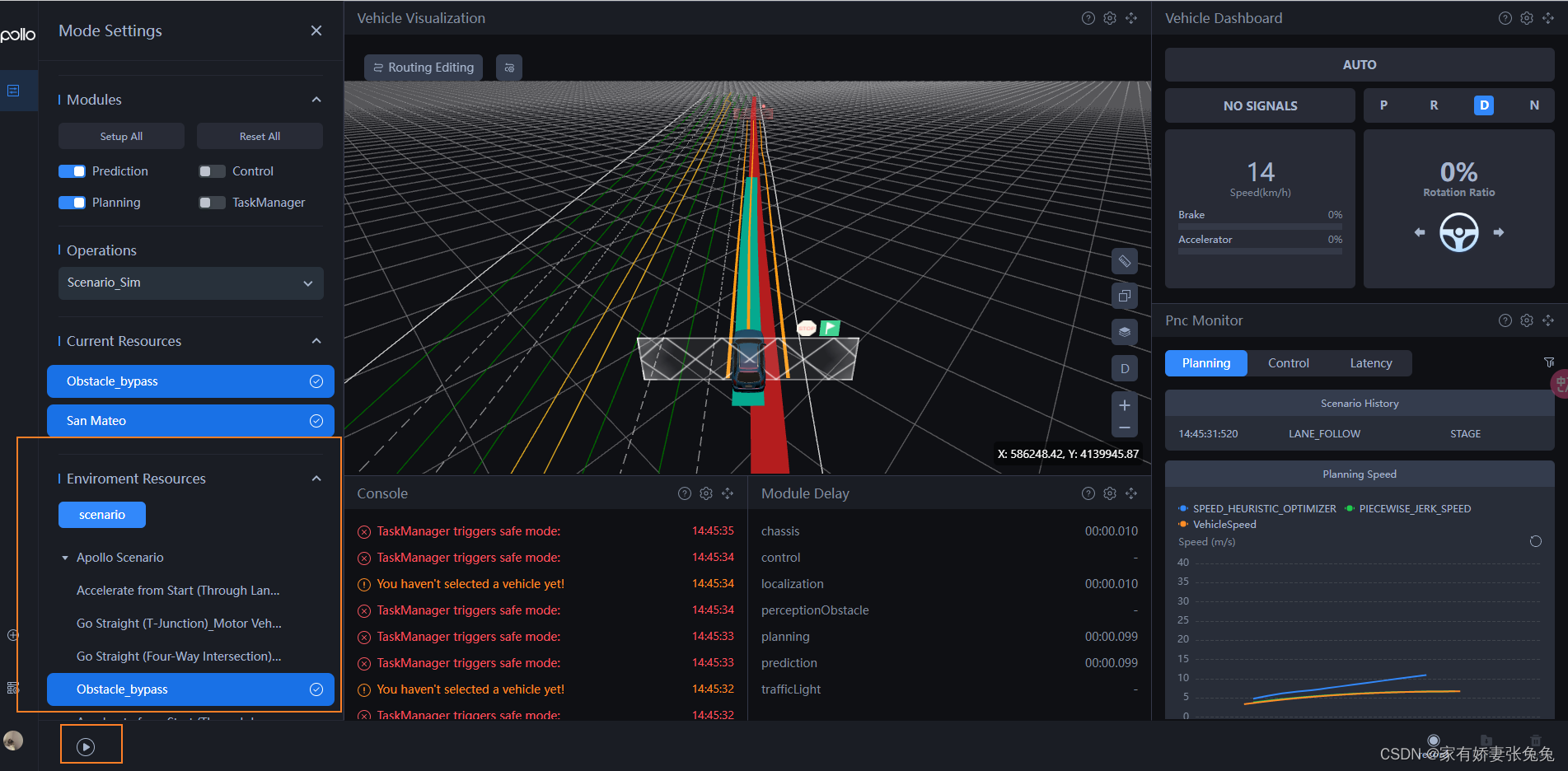
在Enviroment Resource 目录下点击场景Obstacle_bypass,实现场景切换,点击底部栏运行按钮,查看运行结果
实现任务功能
- 打开新的终端窗口,输入配置参数同步指令,系统将自动将planning模块的配置参数复制到profile的default目录中
buildtool profile config init --package planning --profile=default
- 使能default目录为参数生效目录
aem profile use default
- 查看profile插件目录结构:
tree profiles/default/modules/planning/planning_base/
- 目录结构:
1. profiles/default/modules/planning/planning_base
2. |-- conf
3. | |-- discrete_points_smoother_config.pb.txt
4. | |-- planner_open_space_config.pb.txt
5. | |-- planning.conf
6. | |-- planning_config.pb.txt
7. | |-- planning_config_navi.pb.txt
8. | |-- planning_navi.conf
9. | |-- planning_semantic_map_config.pb.txt
10.| |-- qp_spline_smoother_config.pb.txt
11.| |-- spiral_smoother_config.pb.txt
12.| `-- traffic_rule_config.pb.txt
13.|-- dag
14.|-- launch
15.`-- testdata
修改全局配置参数
-
在工作apollo_workspace工作目录找到profiles/default/modules/planning/planning_base/conf/planning.conf配置文件,调整绕行横向缓冲配置参数,达到我们期望路径规划效果
-
使用在线编辑器或者vim编辑器打开profiles/default/modules/planning/planning_base/conf/planning.conf配置文件,将obstacle_lat_buffer 参数为1.0(单位为米)。
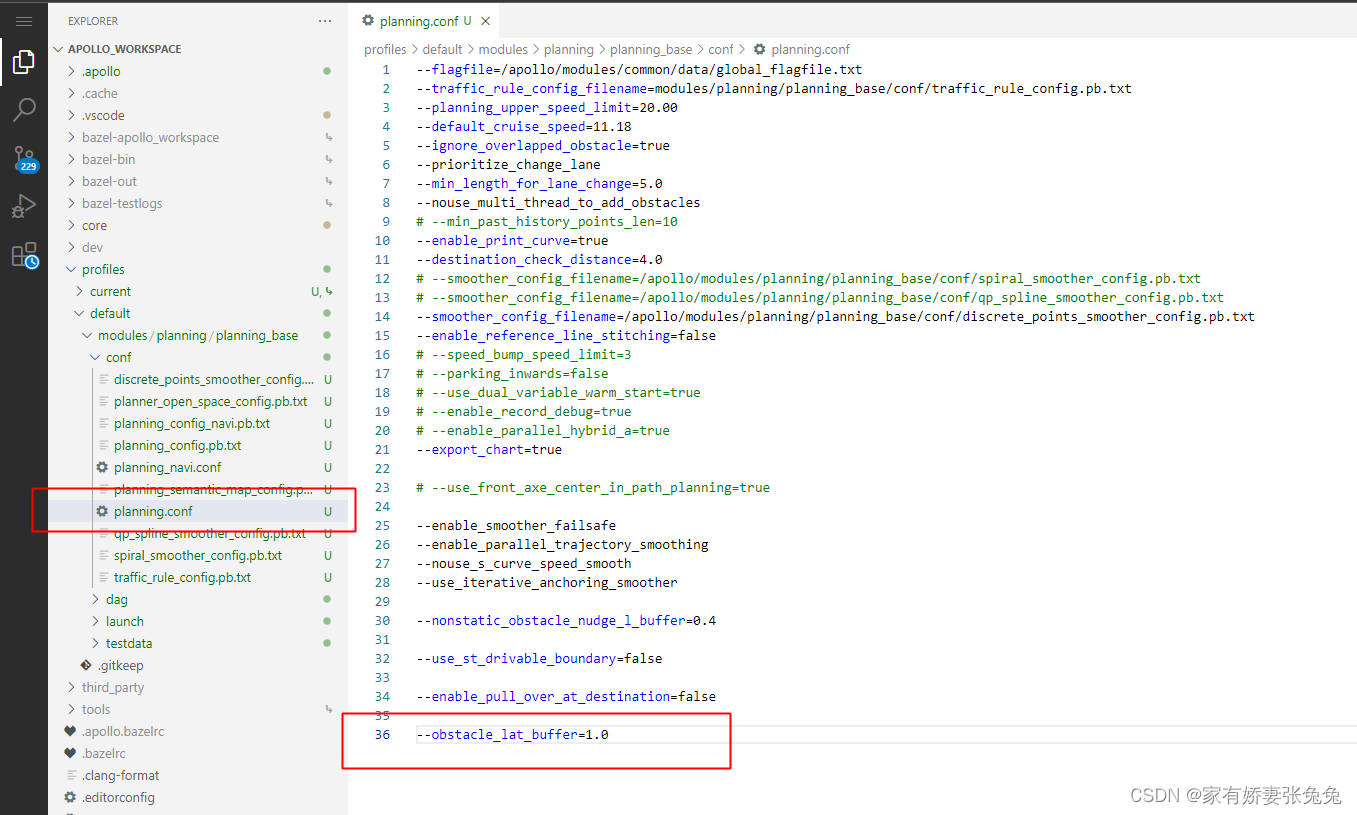
-
修改好代码参数后,保存这个文件,在Modules中重启Planning模块(让系统重新加载Planing参数),重新选择借到绕行场景,观察主车和障碍物距离的调整前后变化。
福利活动
加入课程

Apollo开发者社区 观看课程学习apollo
课程进度可以拖动 几秒就能完成。
学完填表选心仪的奖品领奖就行
表单填写
另有公开课:
















 550
550











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











