







一、将YOLOV3直接部署到TX2上
1、运行在CPU模式下
(1)下载和编译YOLOV3源码
git clone https://github.com/pjreddie/darknet yolo3
cd yolo3
sudo make -j4
(2)下载预训练模型权重文件
wget https://pjreddie.com/media/files/yolov3.weights #可能会出下下载很慢的情况
可以直接将网址粘贴至windows下的浏览器,可直接下载,然后再将该文件放到TX2的工程目录下。
(3)识别示例文件
代码格式: ./darknet detect .cfg 预训练权重 预测权重
代码运行后首先加载网络,然后对/dog.jpg进行就识别检测,结果如下,此时单张处理图片的速度大概为40s,检测精度也很高。
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
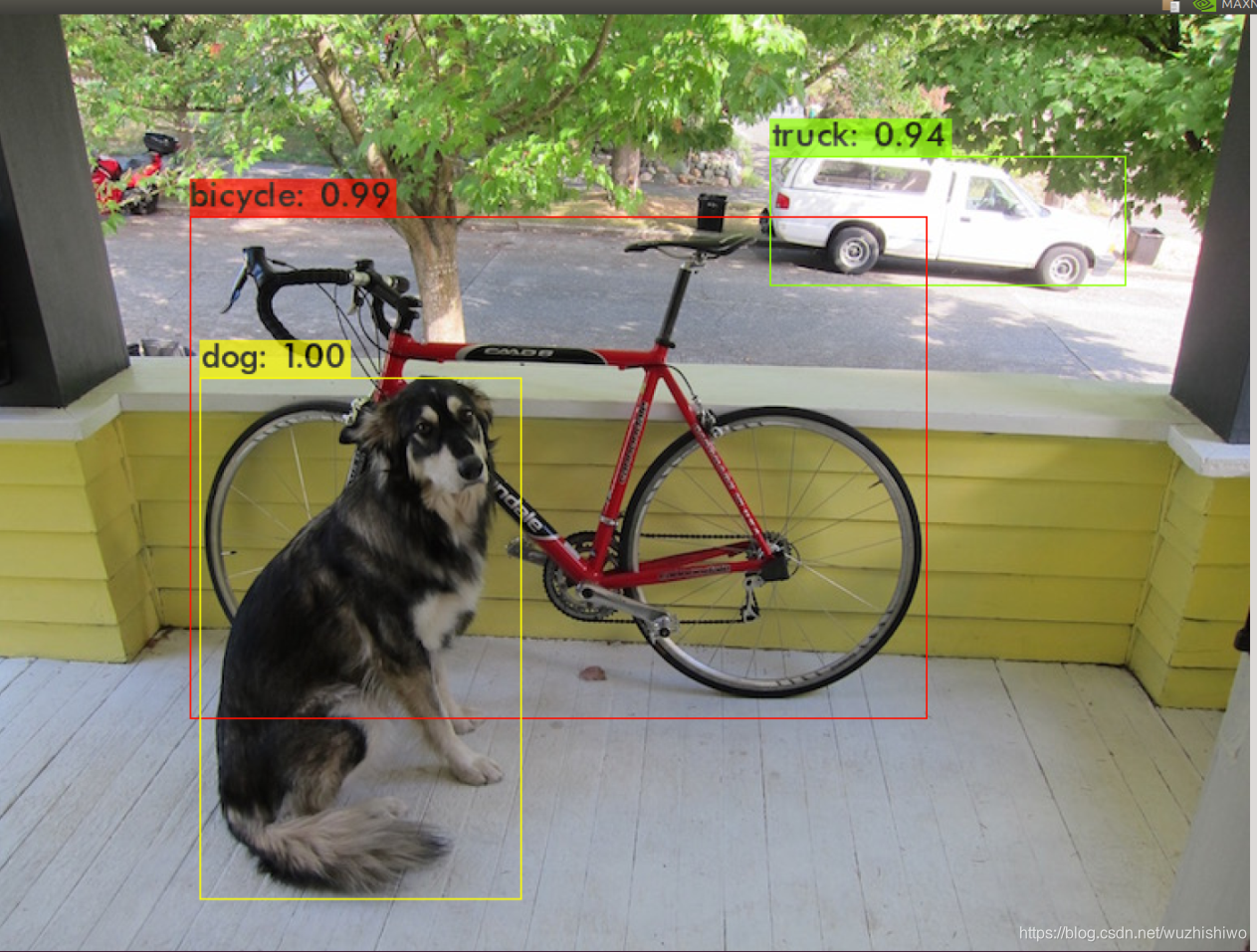
该示例图片如下:

测试效果如下:
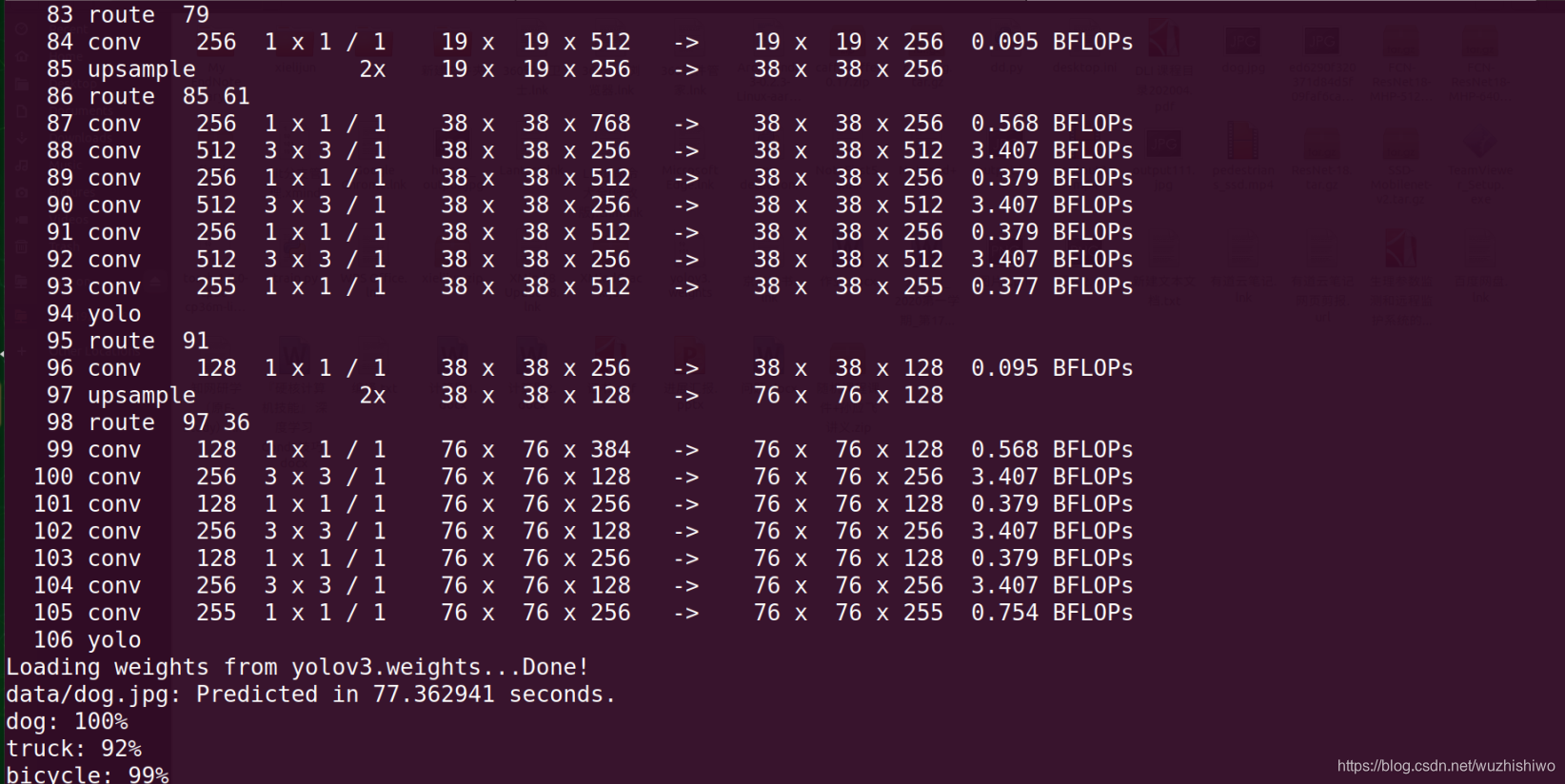
该测试的精度还是比较高的,但是显然处理的时间就很长了,下面我们将TX2开启到最高功耗模式,也就是性能最高的状态。
查看当前的工作模式:
sudo nvpmodel -q verbose
开启最高功耗的模式,即Max-N:
sudo nvpmodel -m 0

结果显示,这里仍旧也要74点多秒来处理,所以仍旧是非常慢的,下面我们让GPU工作起来
2、GPU工作下
我们打开工程目录下的Makefile文件,显然可以看到GPU是没有工作的,所以下面我们修改一下这个文件。
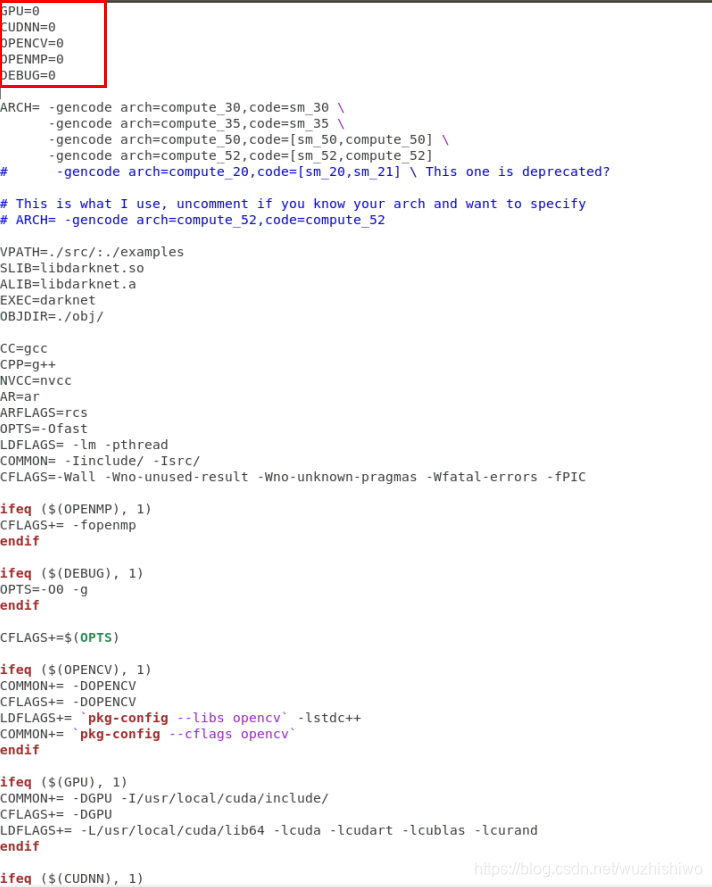
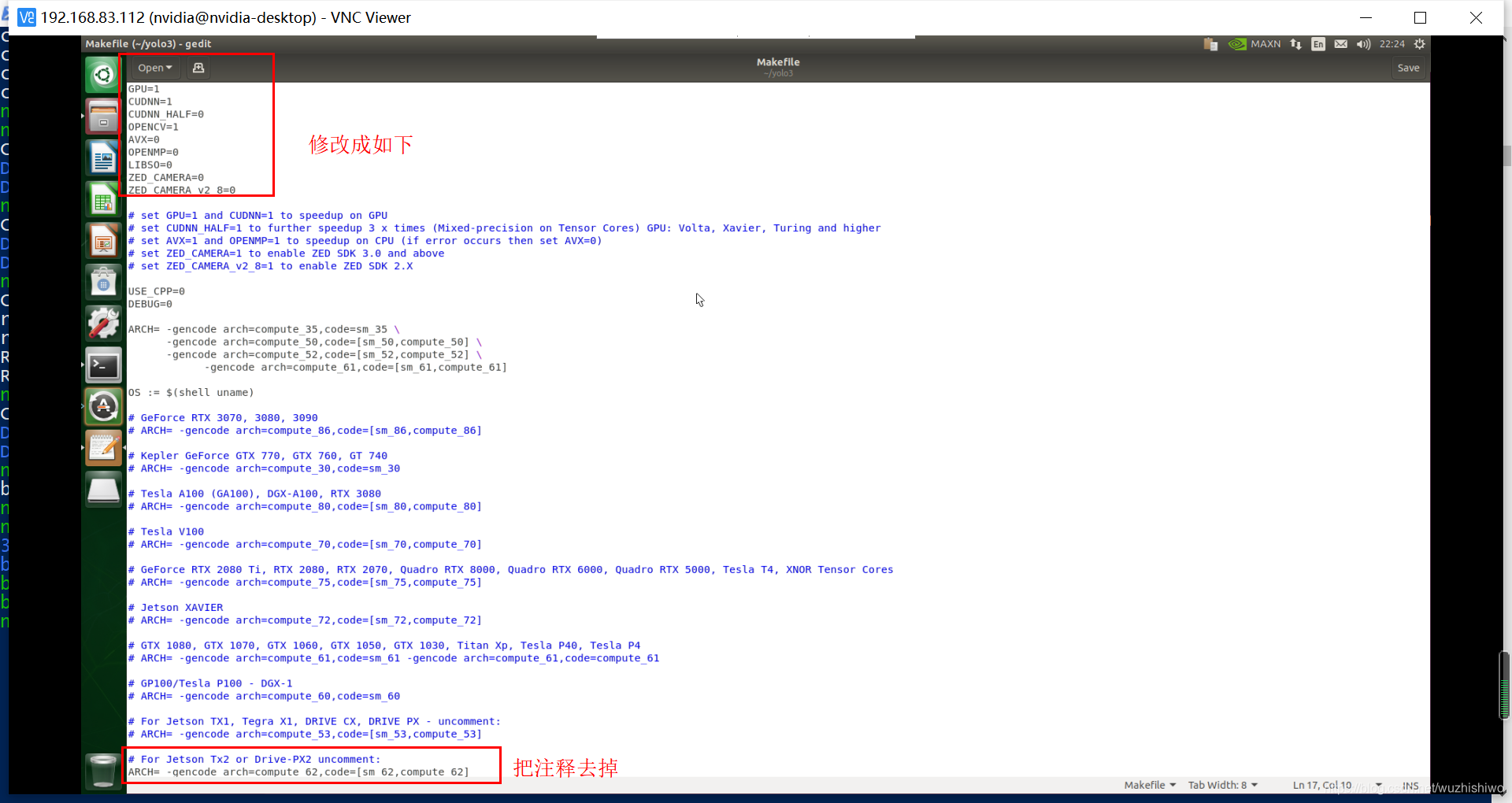
修改如下:
GPU=1
CUDNN=1
OPENCV=1
OPENMP=0
DEBUG=0
然后重新编译一下:
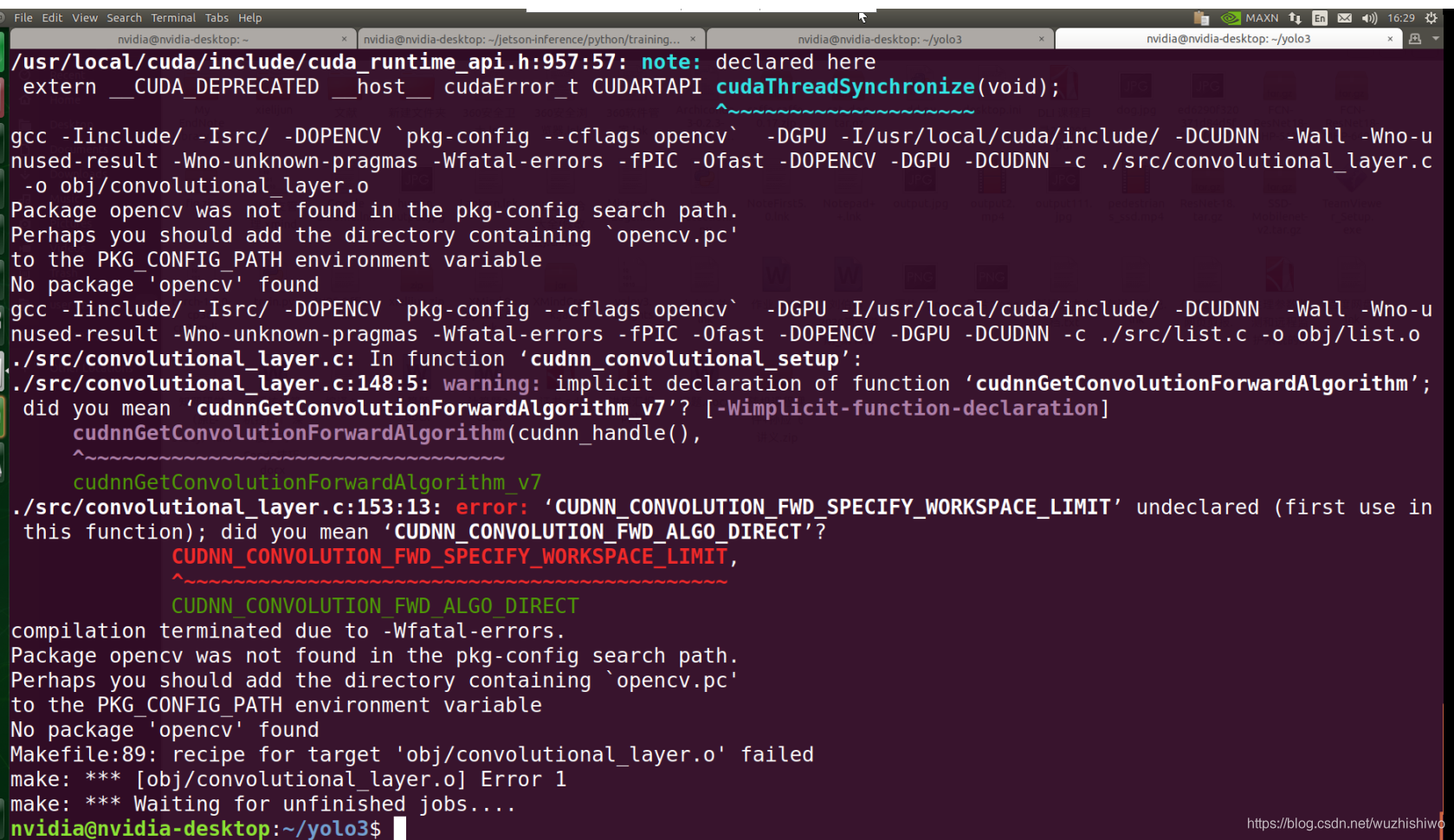
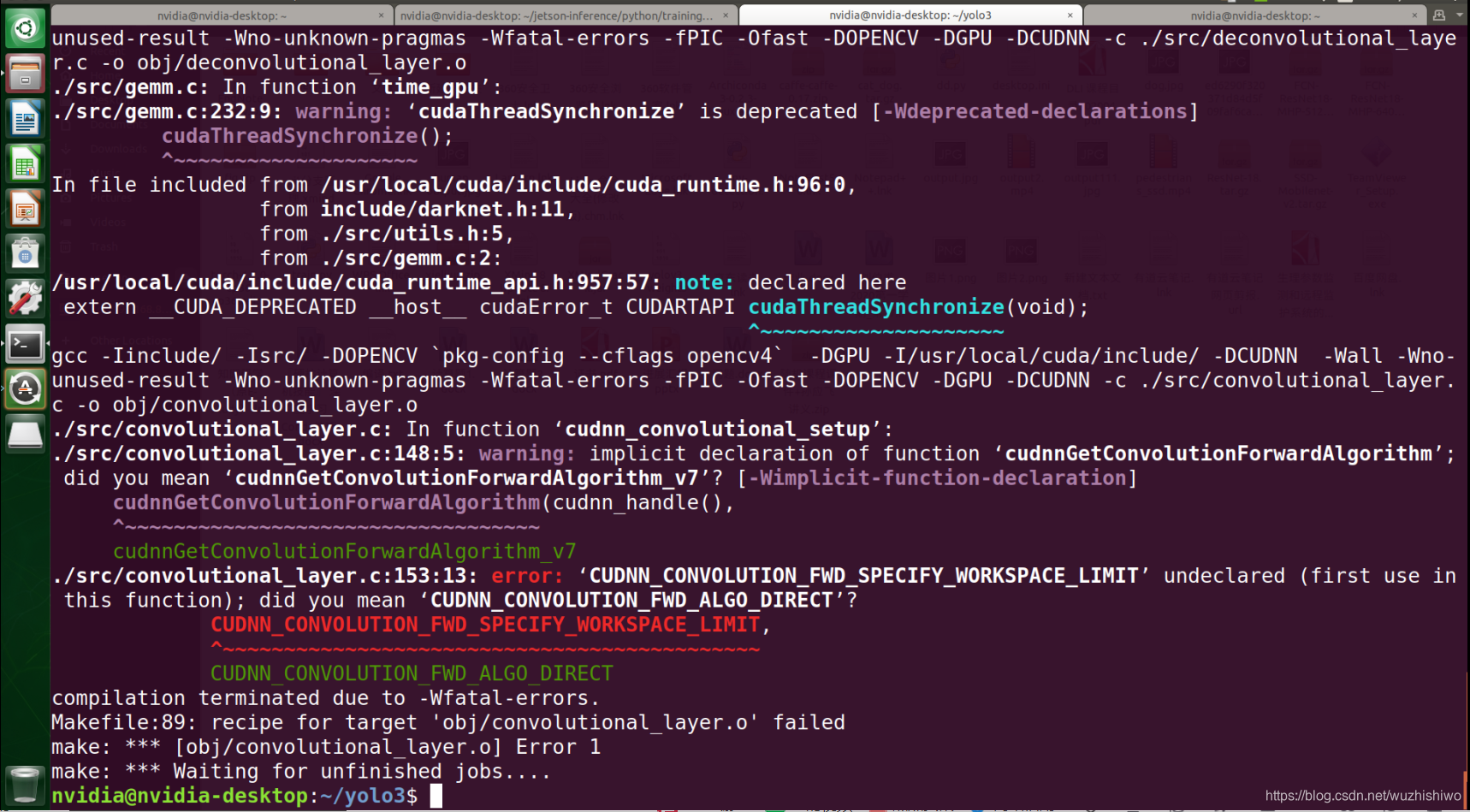
sudo make -j4
然后出现了下面的错误。
然后我们输入下面的命令看下opencv是不是存在。
python -c "import cv2; print(cv2.__version__)"

显然,是有装opencv的,那么为什么还会报错呢,有可能是环境变量的问题。我们查找下它的安装路径:
sudo find / -iname "*opencv*"
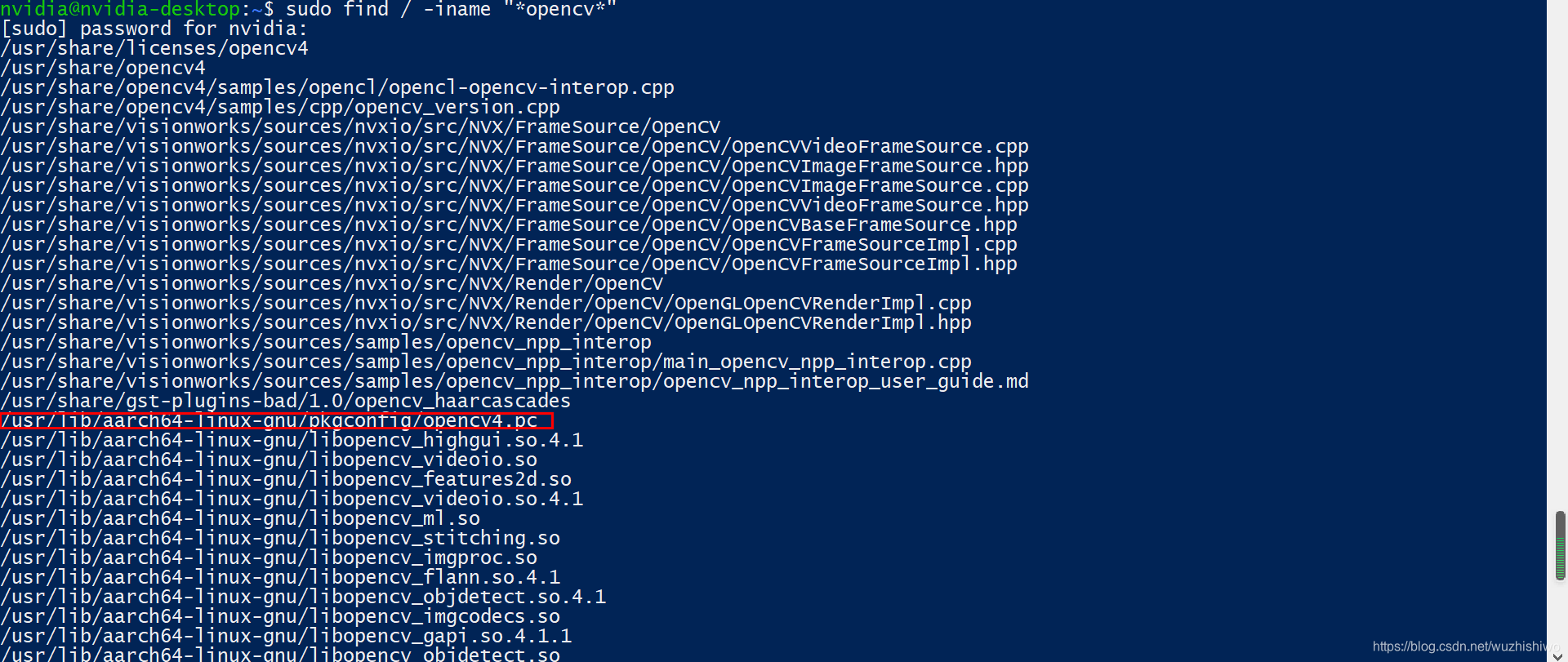

然后我们将该文件复制到该目录中,用如下命令:
sudo cp -f /usr/lib/aarch64-linux-gnu/pkgconfig/opencv4.pc /usr/lib/pkgconfig/

然后再修改下环境变量:
sudo gedit .bashrc
#其中/test/是你的路径,对应的你要找到opencv4.pc的路径,然后将/test/替换掉
export PKG_CONFIG_PATH=/test/:$PKG_CONFIG_PATH
source .bashrc
然后打开Makefile,将opencv修改为opencv4,然后又出现了新的错误
然后博主就怀疑是这个git源有问题,所以就在其他地方找了另外一个源,所以我们删除掉原来的工程项目(要在root权限下删除),重新克隆下。
git clone https://github.com/AlexeyAB/darknet yolo3
然后我们再把预训练模型的权重放到该目录下(按照之前的步骤,可以通过ftp传输和远程实现)。
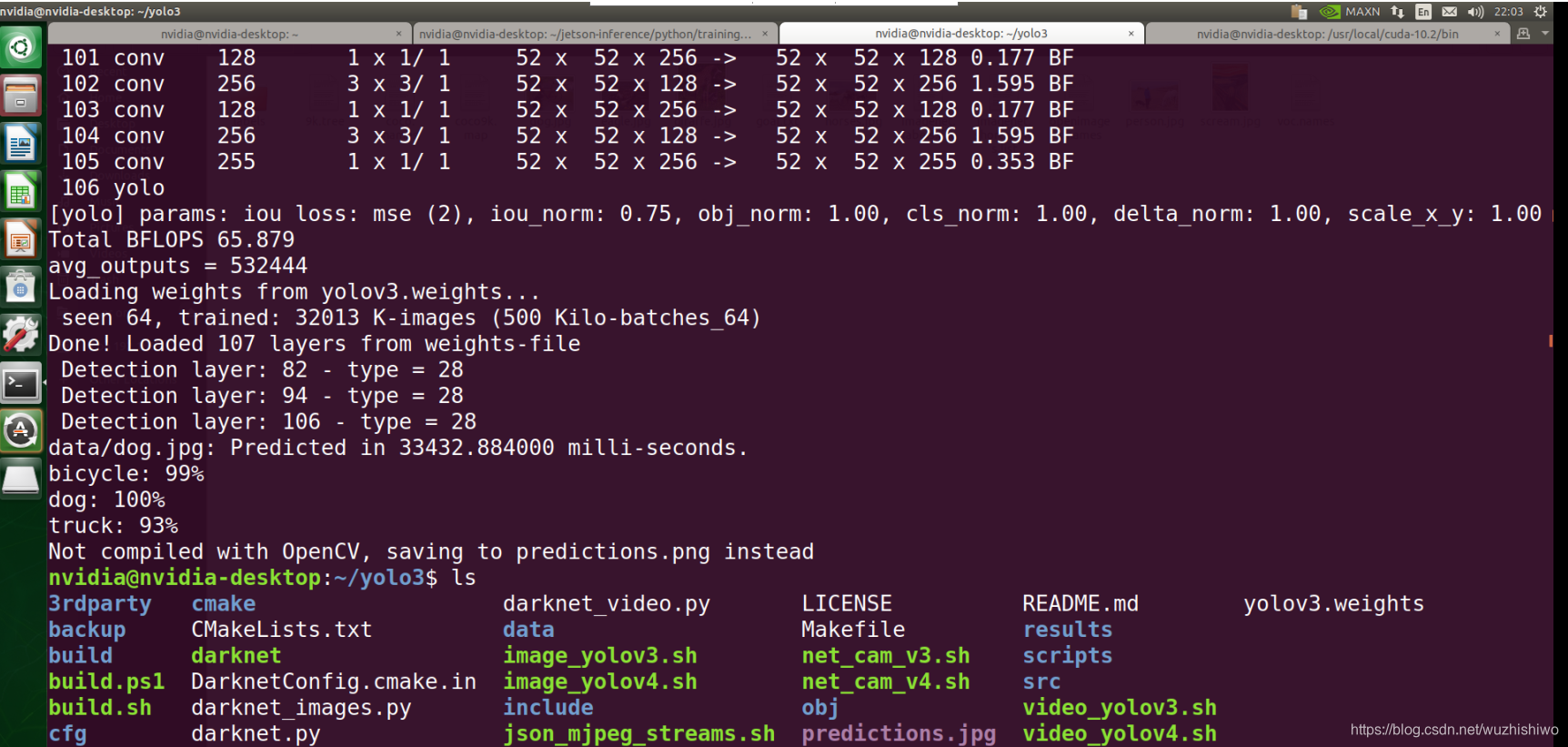
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
结果如下:
然后我们再开启GPU和opencv,我们打开并修改Makefile文件。
sudo gedit Makefile
然后重新编译一下。
sudo make -j4
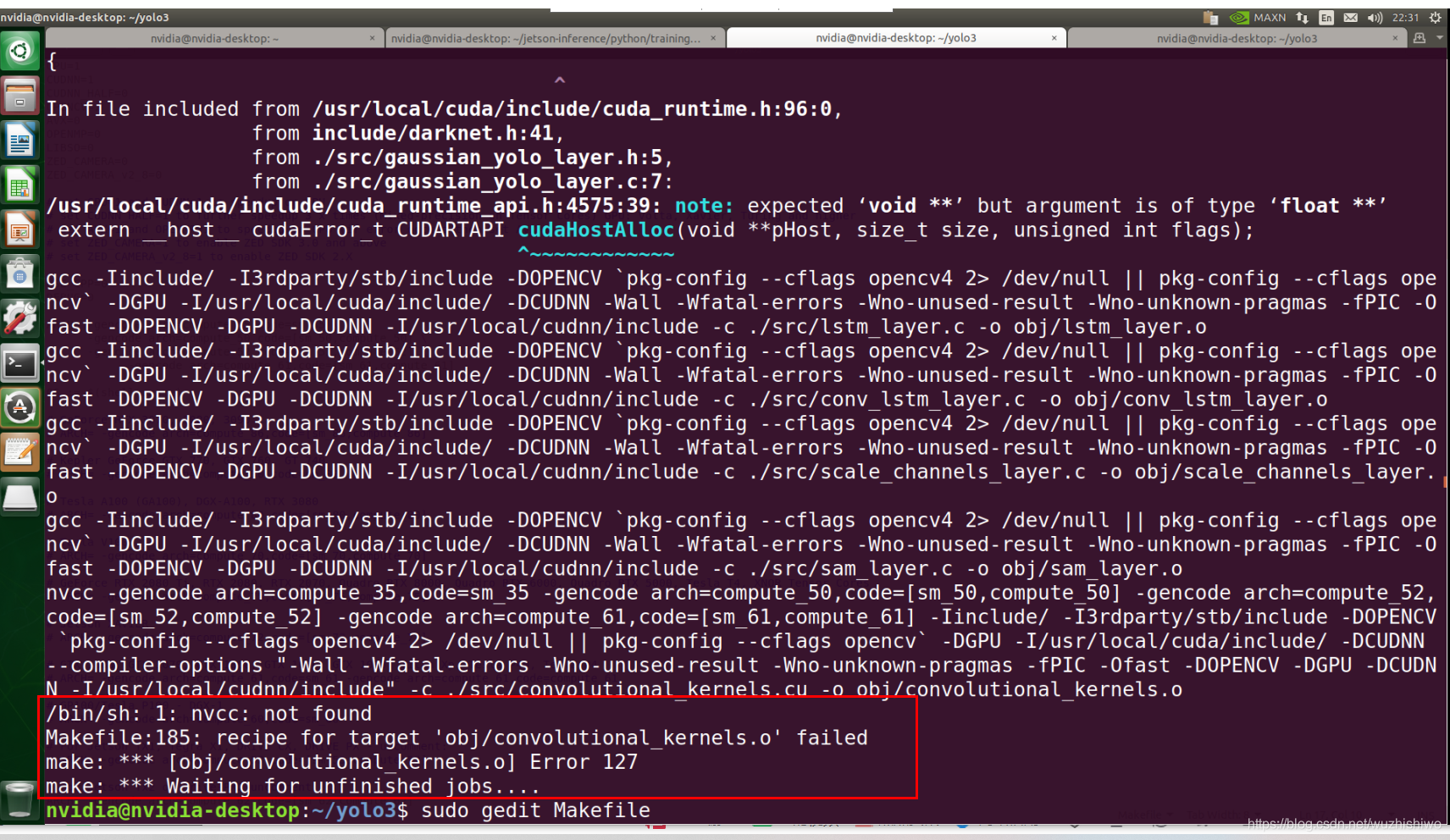
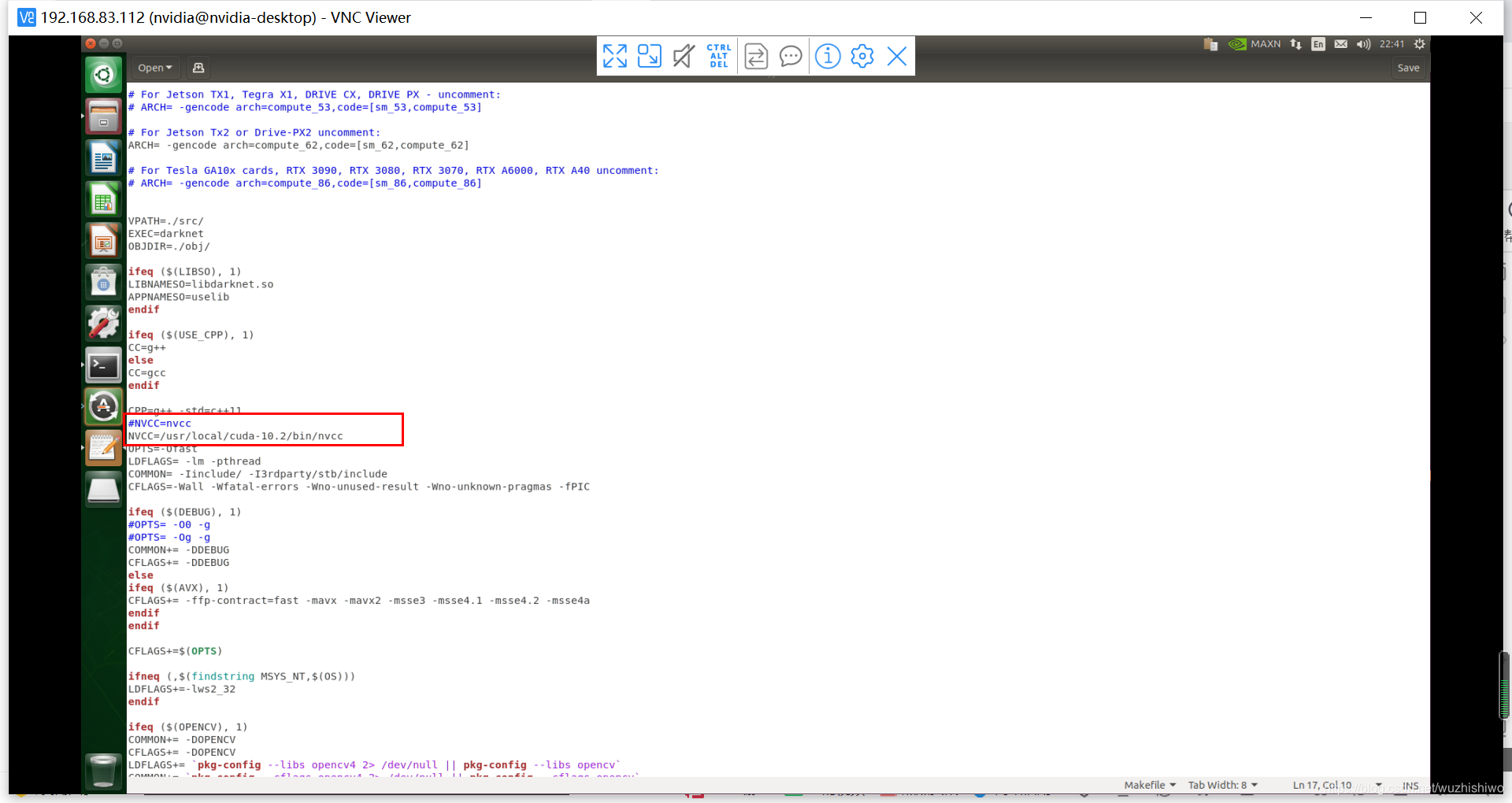
然后根据该提示再修改Makefile文件,再修改之前,我们需要找到nvcc的路径,显然这在cuda目录下。

将原来的NVCC=nvcc注释掉
然后修改成如下:
NVCC=/usr/local/cuda-10.2/bin/nvcc
也就是添加刚刚所查的路径
最后再重新编译一下,就可以通过了。
3、修改模型超参数
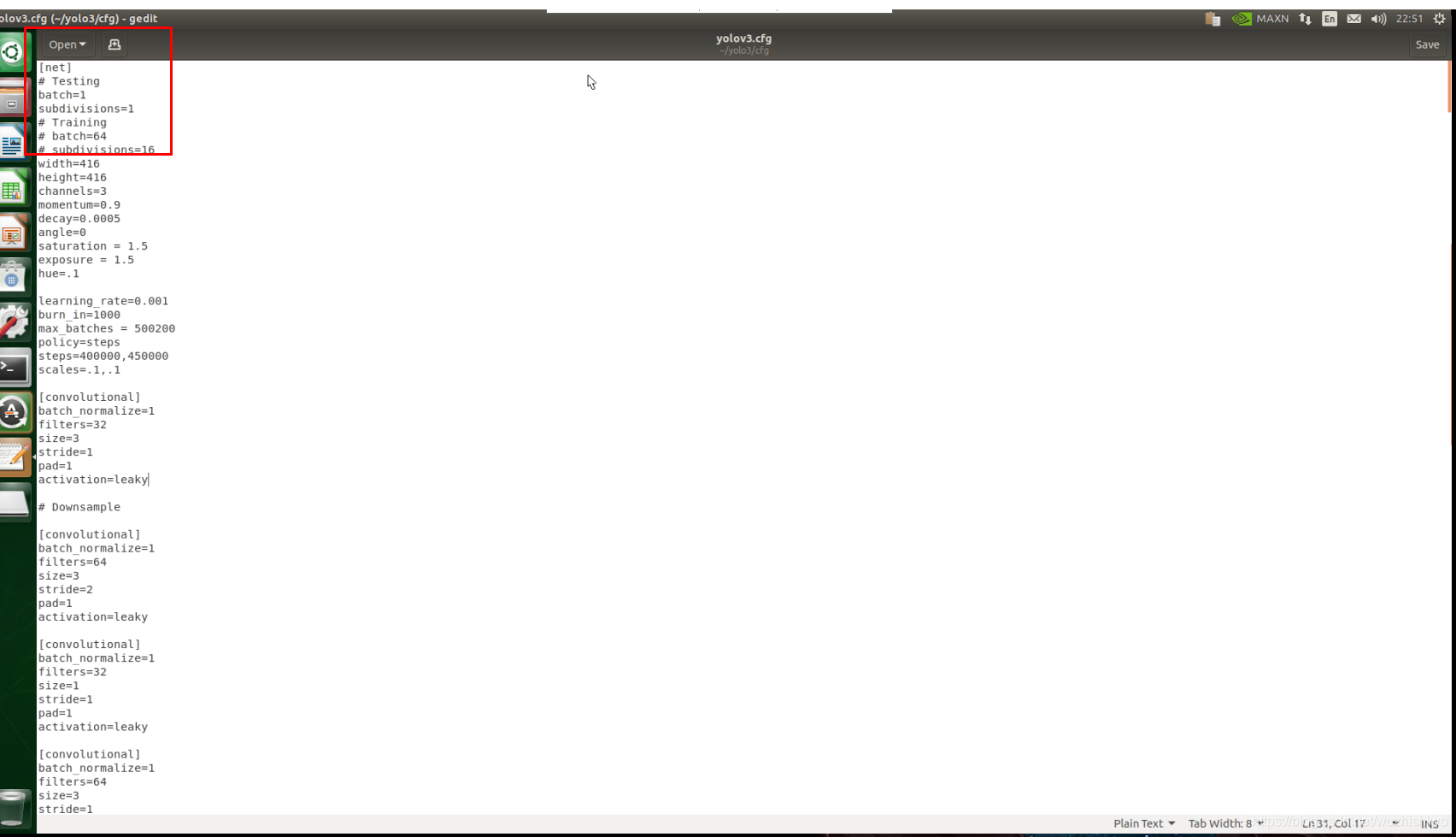
改为GPU模式后还需要对模型的batch size等超参数进行修改,否则TX2的内存将很快被耗尽,造成系统卡顿的现象。因此修改yolov3/cfg/yolov3.cfg文件,将Training注释掉,改Testing的batch为1,修改后文件的前几行如下所示:
然后运行下代码,检测下示例图片。
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
结果如下:
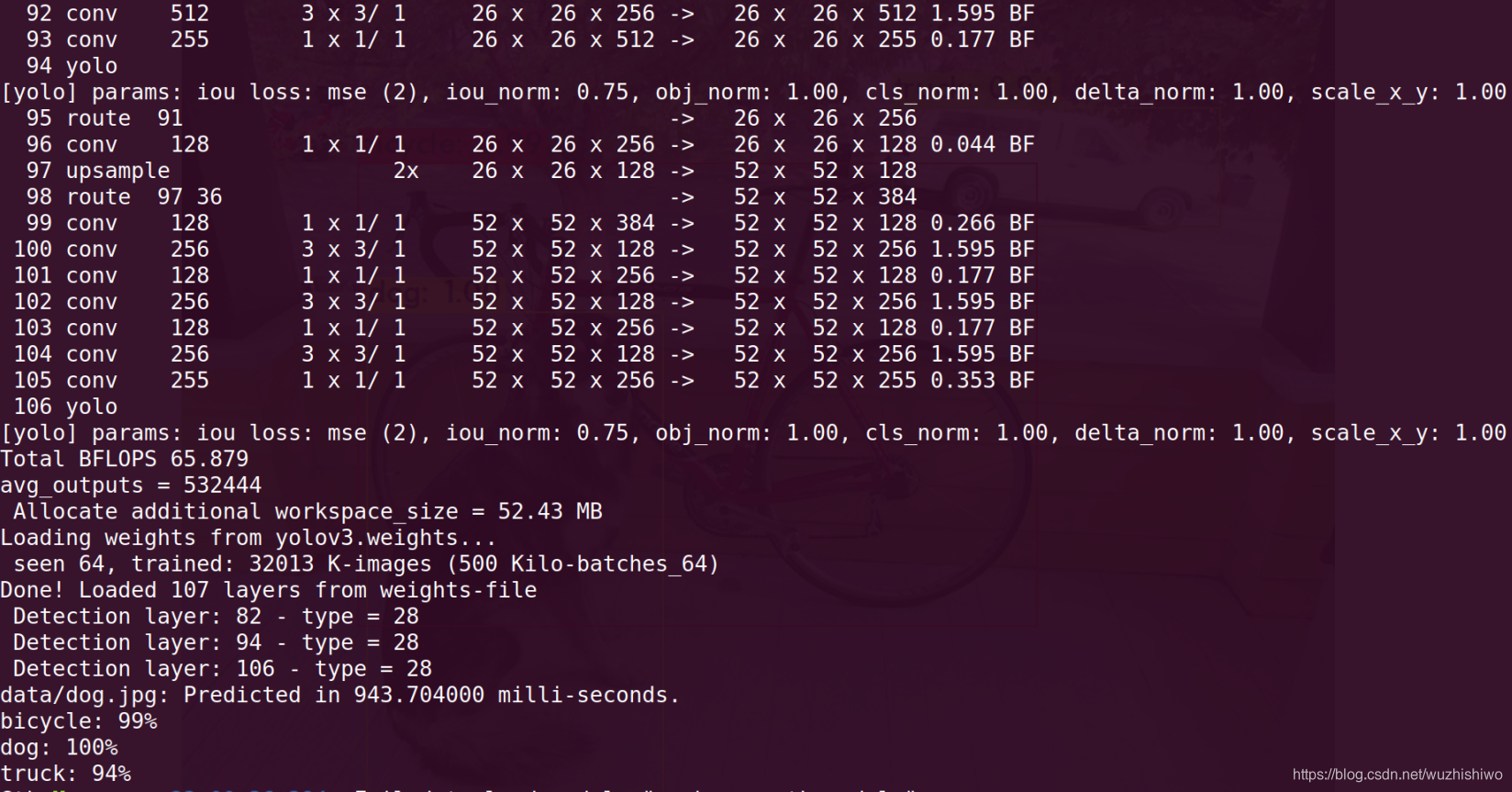
这里只花了不到1秒左右就可以处理完了,而之前需要30多秒的时间。
二、使用Tiny YOLOv3预训练模型
cfg文件夹里面包含众多已经训练好的模型, yolov3-tiny便是其中的一个轻量级的网络,相较与yolov3,他的检测速度有了很大的提高,可以跑一看看效果
1、下载权重文件
wget https://pjreddie.com/media/files/yolov3-tiny.weights
2、运行代码,检测示例图片
./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg
效果如下:
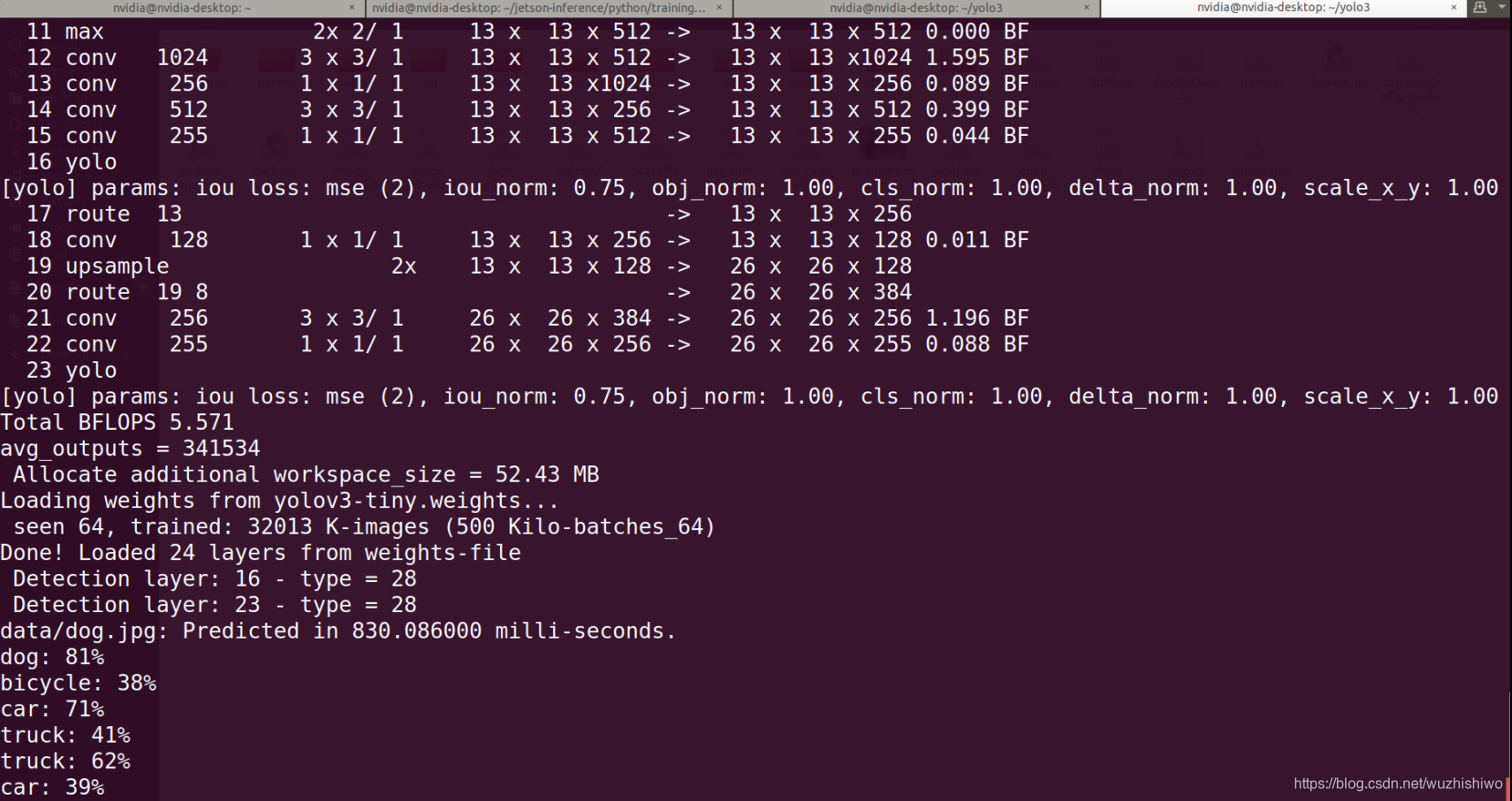
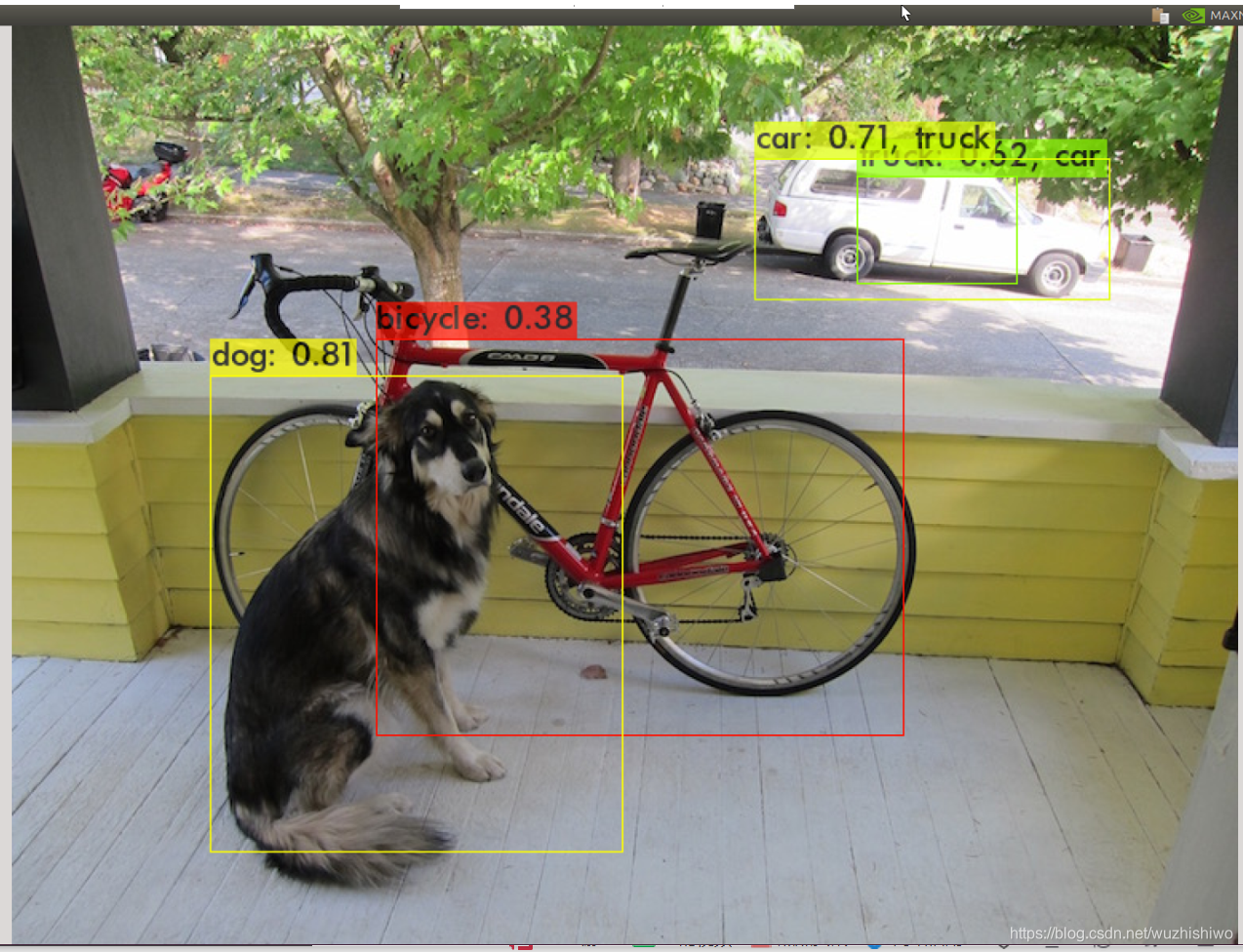
虽然速度上去了,但是这个精确度却下降了。
3、实时检测
./darknet detector demo cfg/coco.data cfg/yolov3-tiny.cfg yolov3-tiny.weights -c 1
下面采用如下的方法尝试解决.
1、安装ffmpeg
git clone https://git.ffmpeg.org/ffmpeg.git ffmpeg
cd ffmpeg
./configure --enable-shared --prefix=/usr/local/ffmpeg # /usr/local/ffmpeg 为要安装的目录,建议设置为这个
sudo apt-get install yasm
make -j8
make install -j8
ffmpeg -version
export PKG_CONFIG_PATH=/usr/local/ffmpeg/lib/pkgconfig#每个人的可能不一样所以也需要自己去查找一下,然后在.bashrc中添加
cmake -D WITH_FFMPEG=ON ..#在opencv的目录下编译,但是博主一直找不到Cmakelist.txt文件
配置环境变量
export PATH="/usr/local/ffmpeg/bin:$PATH"#每个人的可能不一样
2、修改Makefile(没用)
#LDFLAGS+= `pkg-config --libs opencv4 2> /dev/null || pkg-config --libs opencv`
LDFLAGS+= `pkg-config --libs opencv`
#COMMON+= `pkg-config --cflags opencv4 2> /dev/null || pkg-config --cflags opencv`
COMMON+= `pkg-config --cflags opencv`
3、最后发现是命令参数不对,正确的应该如下:
./darknet detector demo cfg/coco.data cfg/yolov3-tiny.cfg yolov3-tiny.weights "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv flip-method=0 ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink"
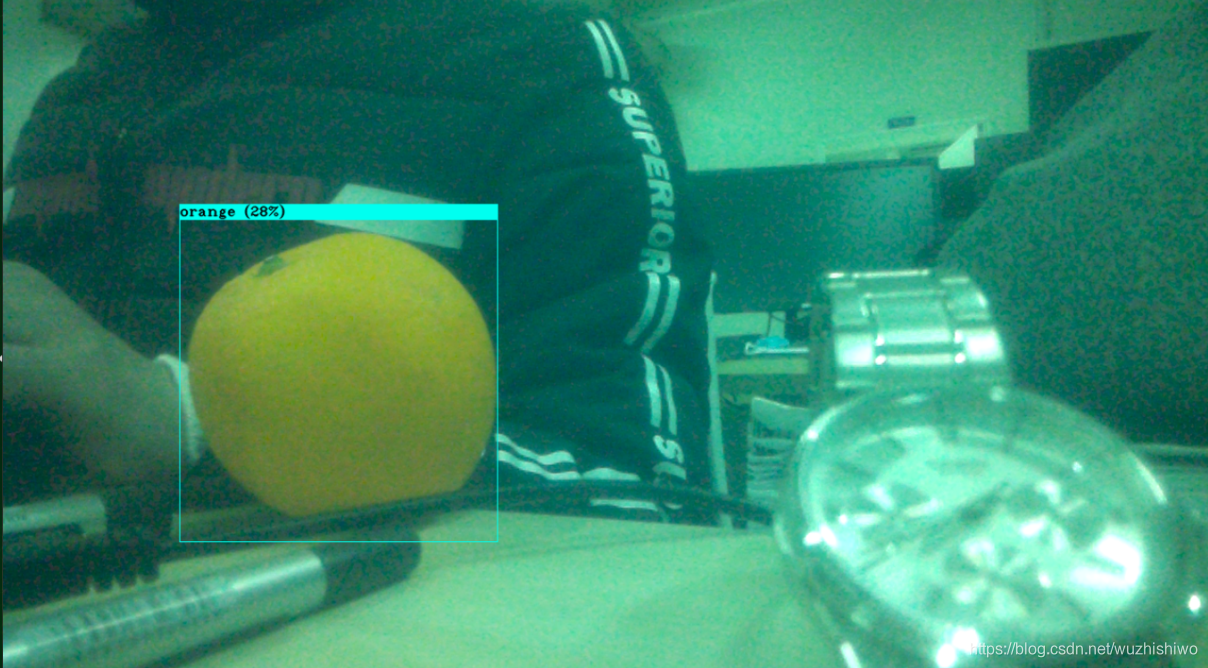
实验的效果是平均12.6fps,勉强达到实时的效果。














 6617
6617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









