






GPIO
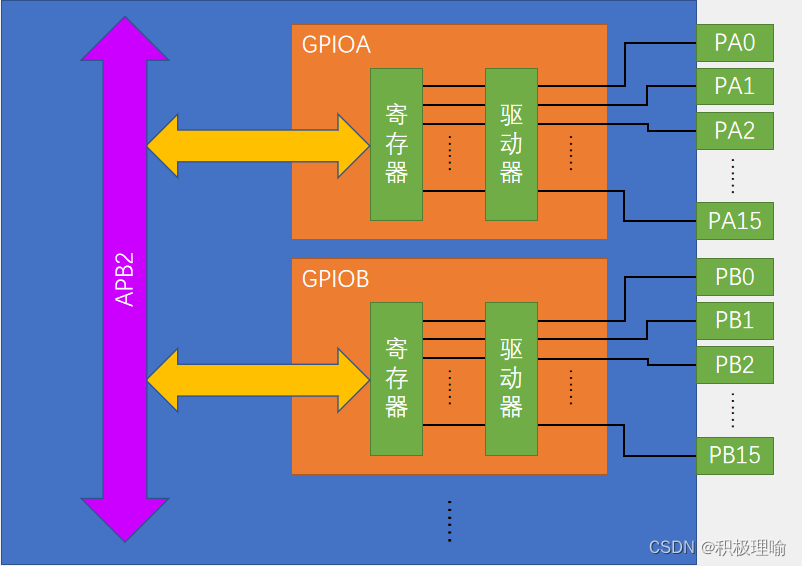
在STM32中,所有GPIO都挂载在APB2外设总线上,每个GPIO有16引脚,编号从0-15。
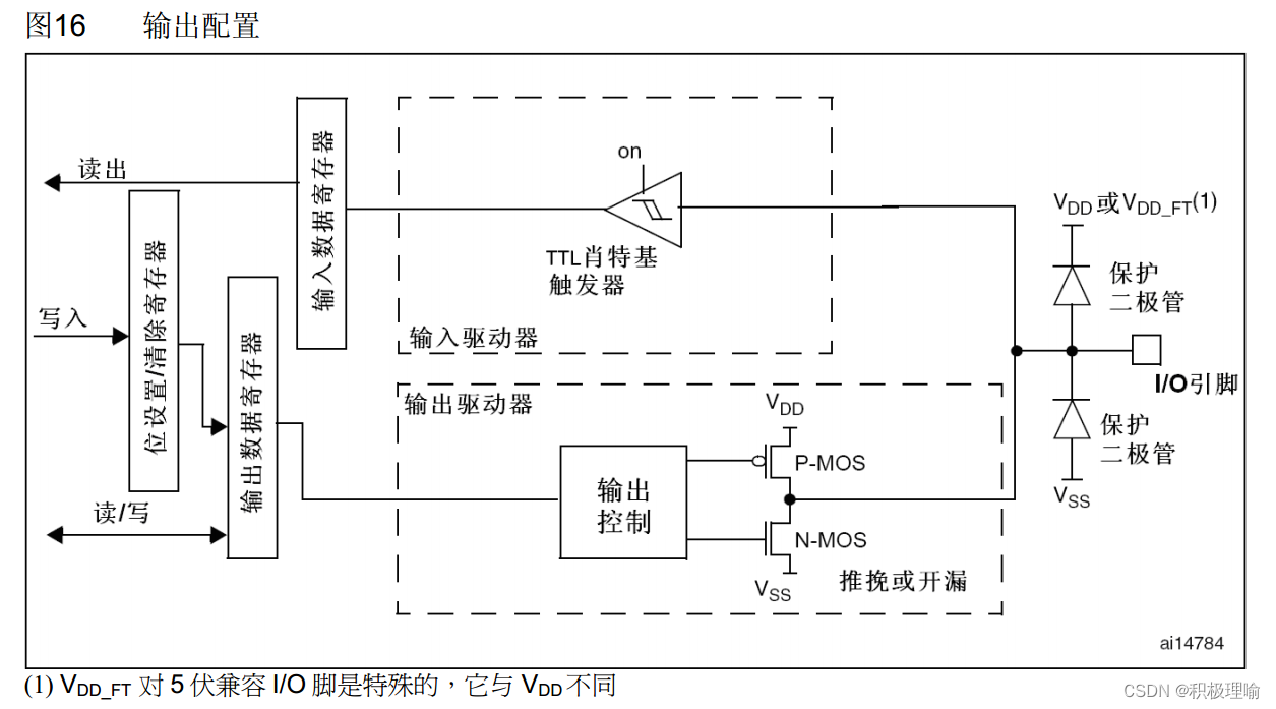
通过配置GPIO端口配置寄存器 ,端口可以配成以下八种模式。

下面介绍两种输出模式:
推挽输出
推挽模式下,P-MOS和N-MOS均有效。输出数据寄存器输出1时,VDD导通,IO后输出高电平。输出数据寄存器输出0时,VSS导通,IO后输出低电平。所以推挽模式下,高低电平驱动均有效。
开漏输出
开漏输出模式下,N-MOS管有效。输出数据寄存器输出0时,VSS导通,IO后输出低电平。所以开漏输出模式下,低电平驱动有效。
点亮A0口LED
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启时钟
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_OD; //开漏输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
while(1)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
}
}
GPIO_Mode_Out_OD 开漏输出模
GPIO_Mode_Out_PP 推挽输出模式
GPIO_ResetBits 置IO低电平
GPIO_SetBits 置IO高电平
LED流水灯
LED长脚是正极,短脚是负极。这里采用的是推挽模式下低电平驱动。
for循环点亮
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启GPIOA时钟
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_All;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
while(1)
{
unsigned char i;
for(i=0;i<8;i++)
{
GPIO_Write(GPIOA,~(0x0001<<i));
Delay_ms(500);
}
}
}
数组点亮:
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启GPIOA时钟
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP; //推挽模式
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_All; //GPIOA所有位口
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
while(1)
{
unsigned char i;
int Num[]={0x0080,0x0040,0x0020,0x0010,0x0008,0x0004,0x0002,0x0001};
for(i=0;i<8;i++)
{
GPIO_Write(GPIOA,~Num[i]);
Delay_ms(500);
}
}
}
蜂鸣器报警
这里是用GPIOB12口来连接蜂鸣器。蜂鸣器低电平驱动。
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //开启GPIOB时钟
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(700);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(700);
}
}















 3282
3282











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









