






 本文探讨了Arduino舵机在使用过程中出现的抖动现象,并深入分析了问题根源在于串口通信与舵机控制之间的定时器冲突。文章提供了一种通过直接编写PWM信号控制舵机的方法,避免了使用Arduino Servo库所带来的问题。
本文探讨了Arduino舵机在使用过程中出现的抖动现象,并深入分析了问题根源在于串口通信与舵机控制之间的定时器冲突。文章提供了一种通过直接编写PWM信号控制舵机的方法,避免了使用Arduino Servo库所带来的问题。
这几天练习用Arduino通过Servo库控制舵机转动,在中loop中先有几秒让舵机停在0度,然后转到另外一个角度,就在这等待的几秒钟内,舵机不淡定了,不规则地抖动,等到让它转到指定角度时,它也能转过去。我推测这一定是控制程序的问题。在网上查找资料,发现下面的一段话说的靠谱:
在Arduino中,servo是一个库,可以简单的操作舵机。但从servo库的底层代码上来看,它使用了定时器中断,如果你调用了servo库,同时还使用串口通信的功能,那么,恭喜你,对于部分Arduino的板卡来说,一定会抖动。原因很简单,因为串口通信和servo都要使用定时器,所以就不正常了。
就像我一直在教学Arduino的过程中所强调的那样,库是别人写好你来用的,核心的东西你不知道,没准什么时候就有问题就冲突了,要想学好学精,还是要自己通过代码来实现各种功能,不仅性能好,而且还锻炼了你自己的综合能力。
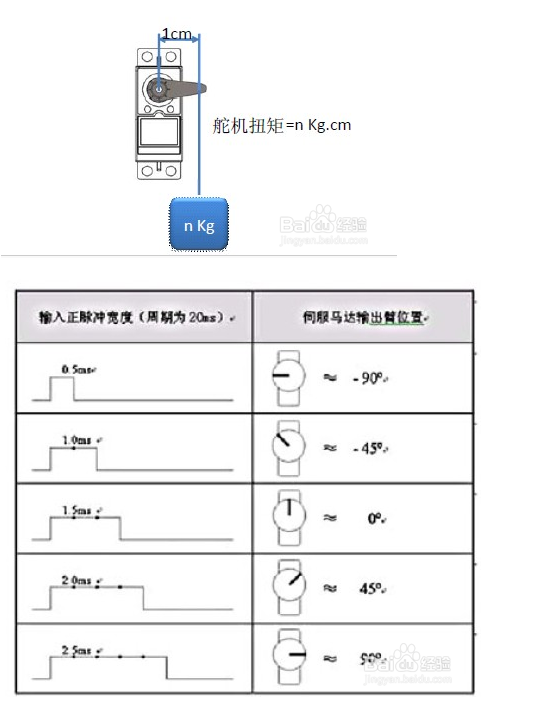
提示你一点关于舵机的知识。驱动舵机,需要产生PWM信号,普通模拟舵机能识别50HZ的PWM信号,其中每个信号周期内,高电平的持续时间代表舵机的驱动角度。500uS为最小舵量,1500为中立舵量,2500为最大舵量,你可以使用micros()这个函数来精确控制高电平的持续时间。
就像我一直在教学Arduino的过程中所强调的那样,库是别人写好你来用的,核心的东西你不知道,没准什么时候就有问题就冲突了,要想学好学精,还是要自己通过代码来实现各种功能,不仅性能好,而且还锻炼了你自己的综合能力。
提示你一点关于舵机的知识。驱动舵机,需要产生PWM信号,普通模拟舵机能识别50HZ的PWM信号,其中每个信号周期内,高电平的持续时间代表舵机的驱动角度。500uS为最小舵量,1500为中立舵量,2500为最大舵量,你可以使用micros()这个函数来精确控制高电平的持续时间。
既然这样,那就重写一段好了:
void servopulse(int angle)//定义一个脉冲函数
{
int pulsewidth=(angle*11)+500; //将角度转化为500-2480的脉宽值,每多转1度,对应高电平多11us
digitalWrite(servopin,HIGH); //将舵机接口电平至高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servopin,LOW); //将舵机接口电平至低
delayMicroseconds(20000-pulsewidth);
}
在setup里设置 pinMode(servopin,OUTPUT);//设定舵机接口为输出接口
在Loop里这样调用:
for(int i=0;i<50;i++) //发送50个脉冲 //为什么是50个?
{
servopulse(angle); //引用脉冲函数
servopulse(angle); //引用脉冲函数
}

















 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









