








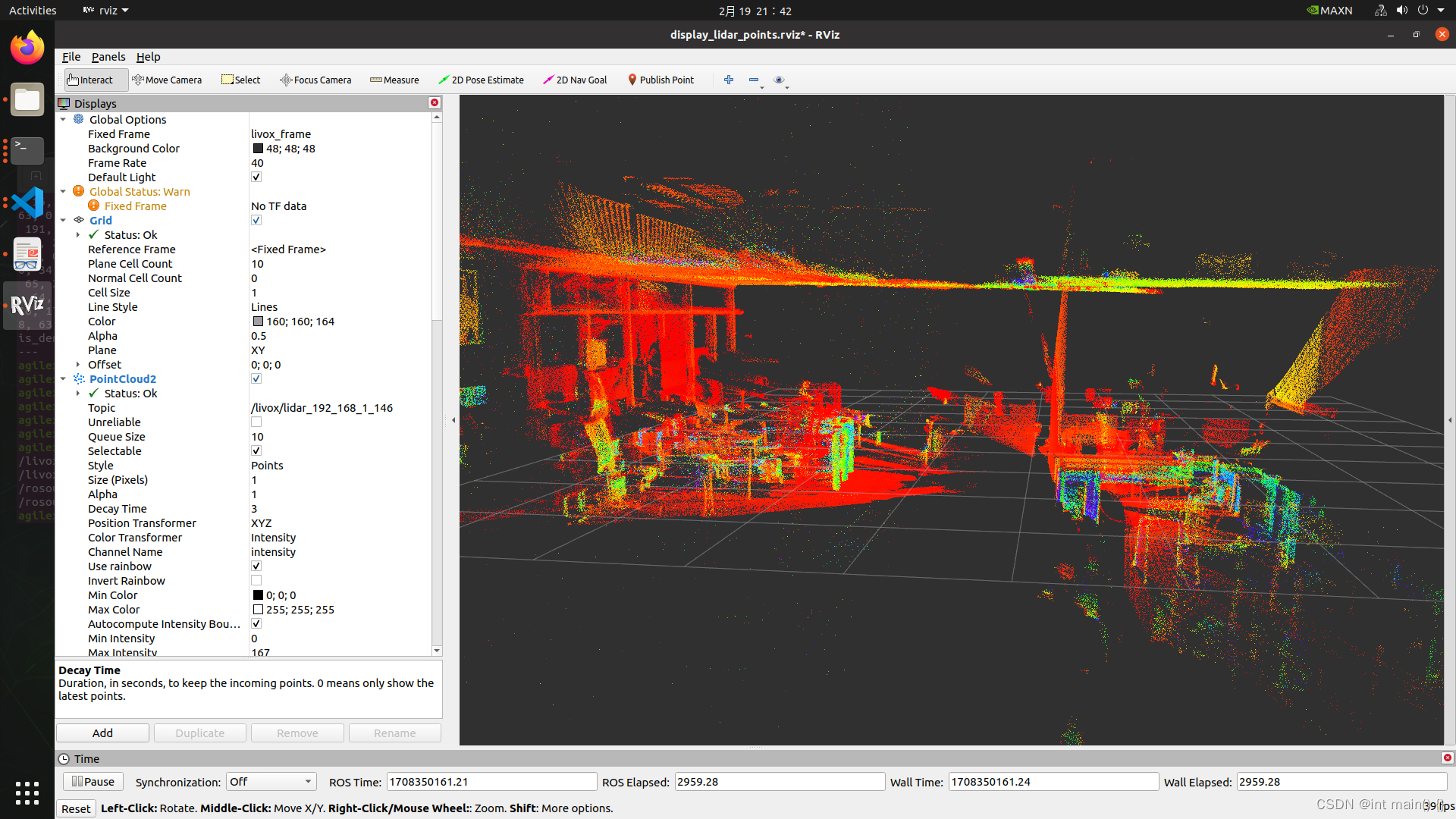
3 AVIA+ MID360在同一个rviz中显示点云
配置成功展示
安装两款雷达不同驱动方法可以参考上篇文章,这里面能显示在同一个rviz中是要求两个驱动都是ROS1的,所以按照上篇文章把humble改为melodic就可以
MID360配置
MID360配置信息只需要更改MID360_config.json中的ip和"lidar_configs",外参标定结果也可输入,rpy单位是角度,xyz单位是毫米
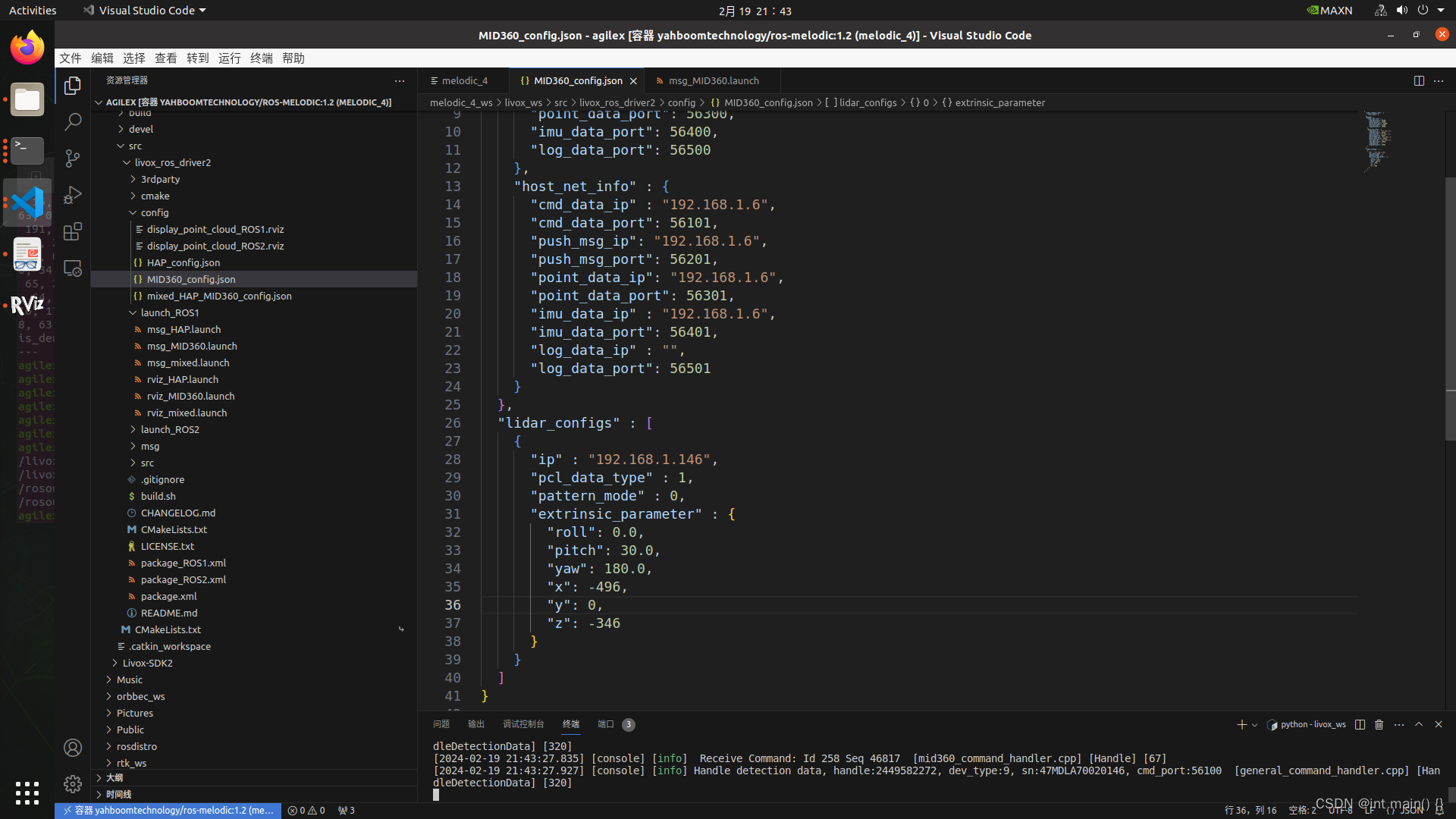
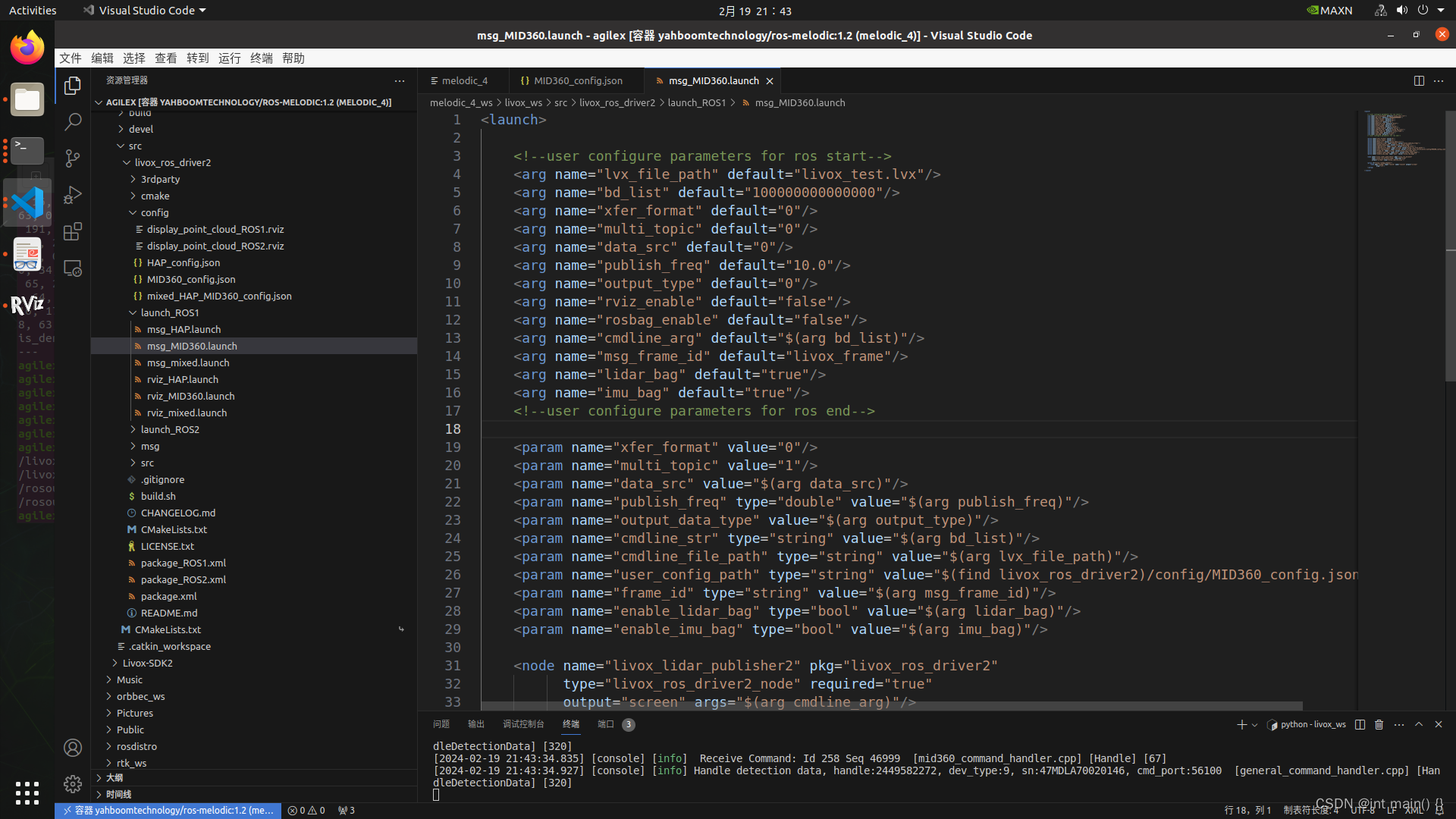
docker中我们不需要显示rviz,只需要雷达的数据即可,所以我们只更改和运行msg_MID360.launch文件即可
"xfer_format" : 0
"multi_topic" : 1 多雷达使用多话题
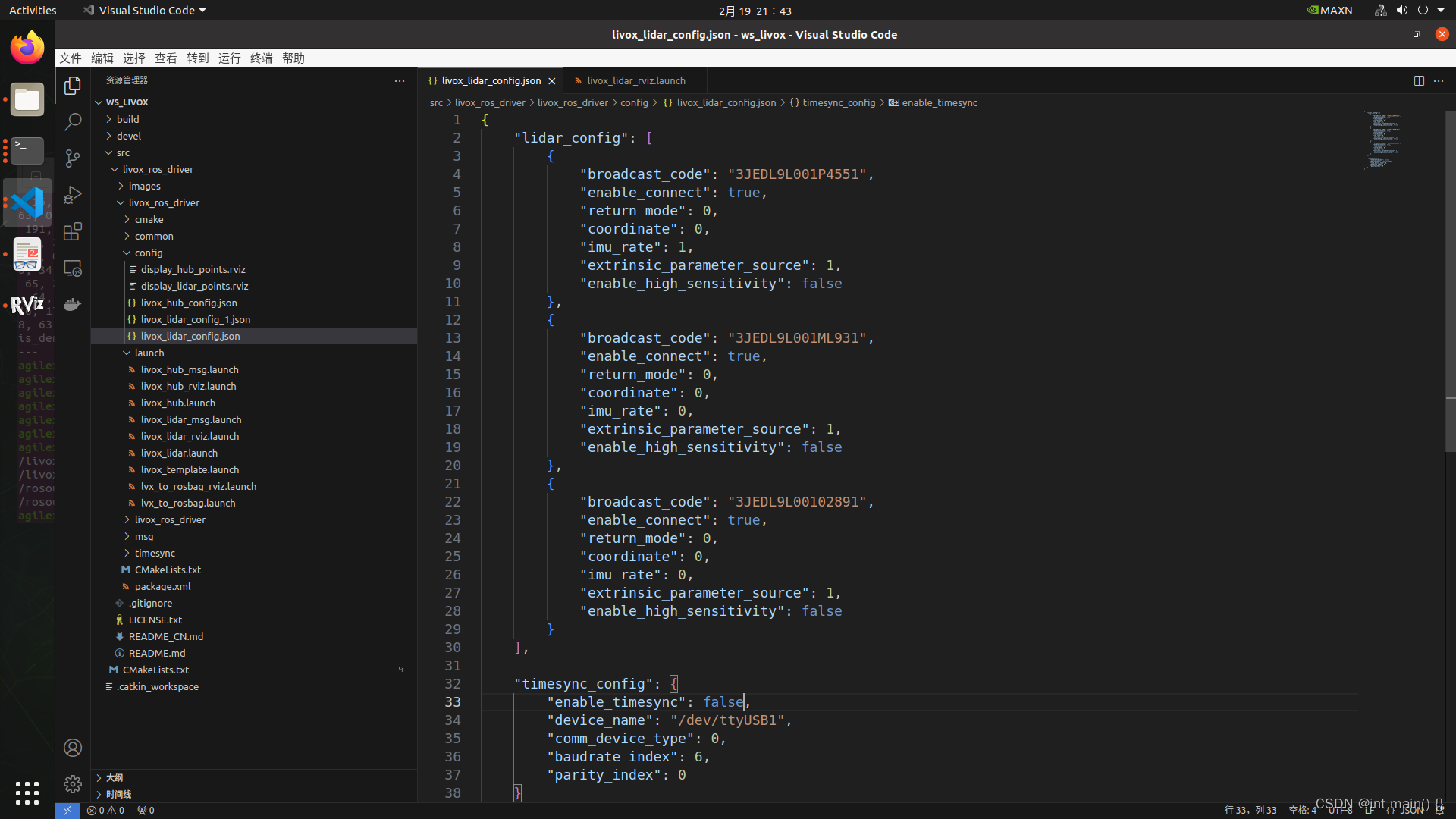
AVIA配置
更改livox_lidar_config.json
"broadcast_code" : 分别为雷达的SN码,在雷达和包装盒子上都能找到
"imu_rate" : 1 推送imu,0停止推送
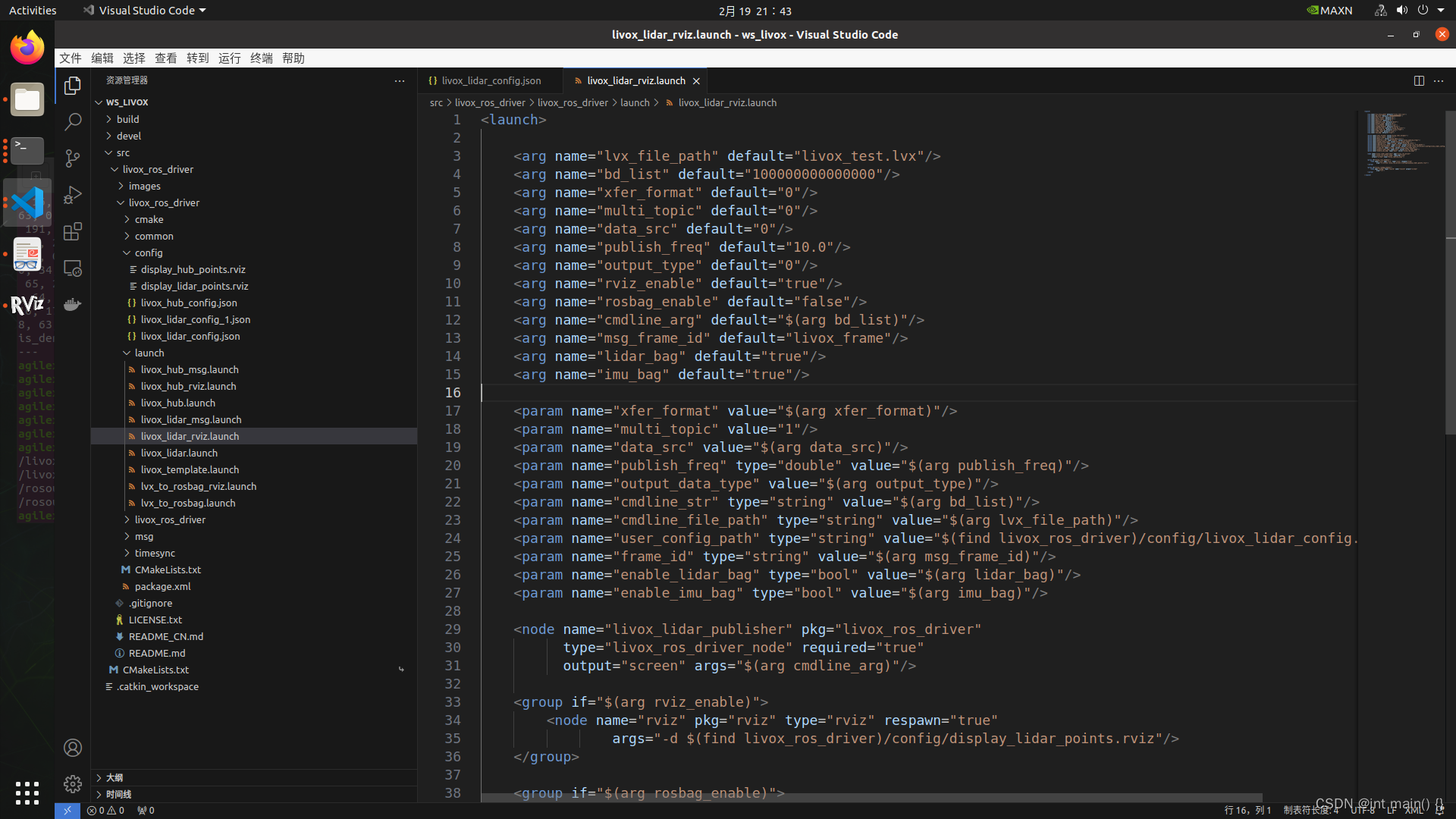
主机用rviz显示,所以我们修改livox_lidar_rviz.launch
"xfer_format" : 0
"multi_topic" : 1 多雷达使用多话题
分别启动launch文件
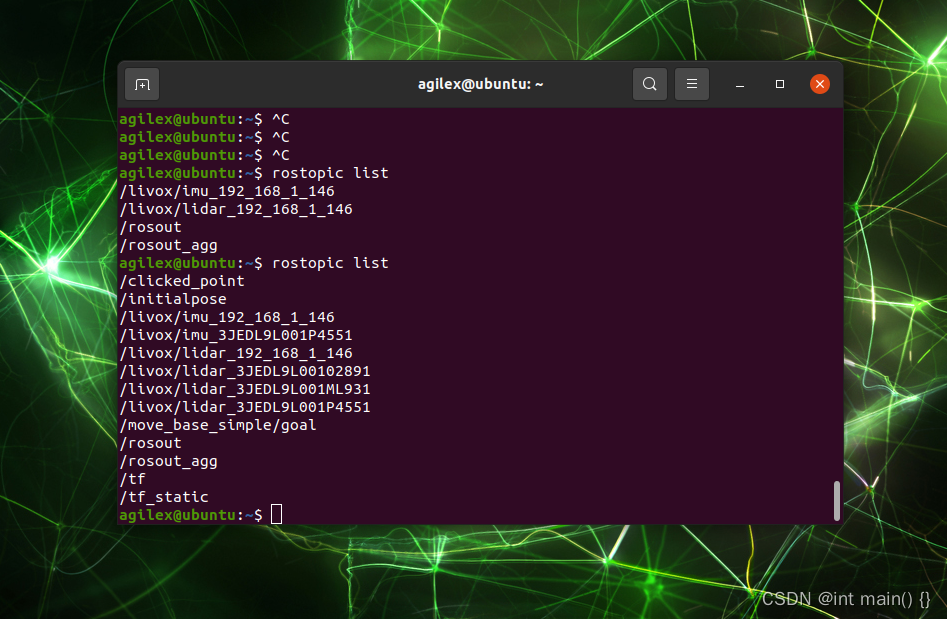
查看话题
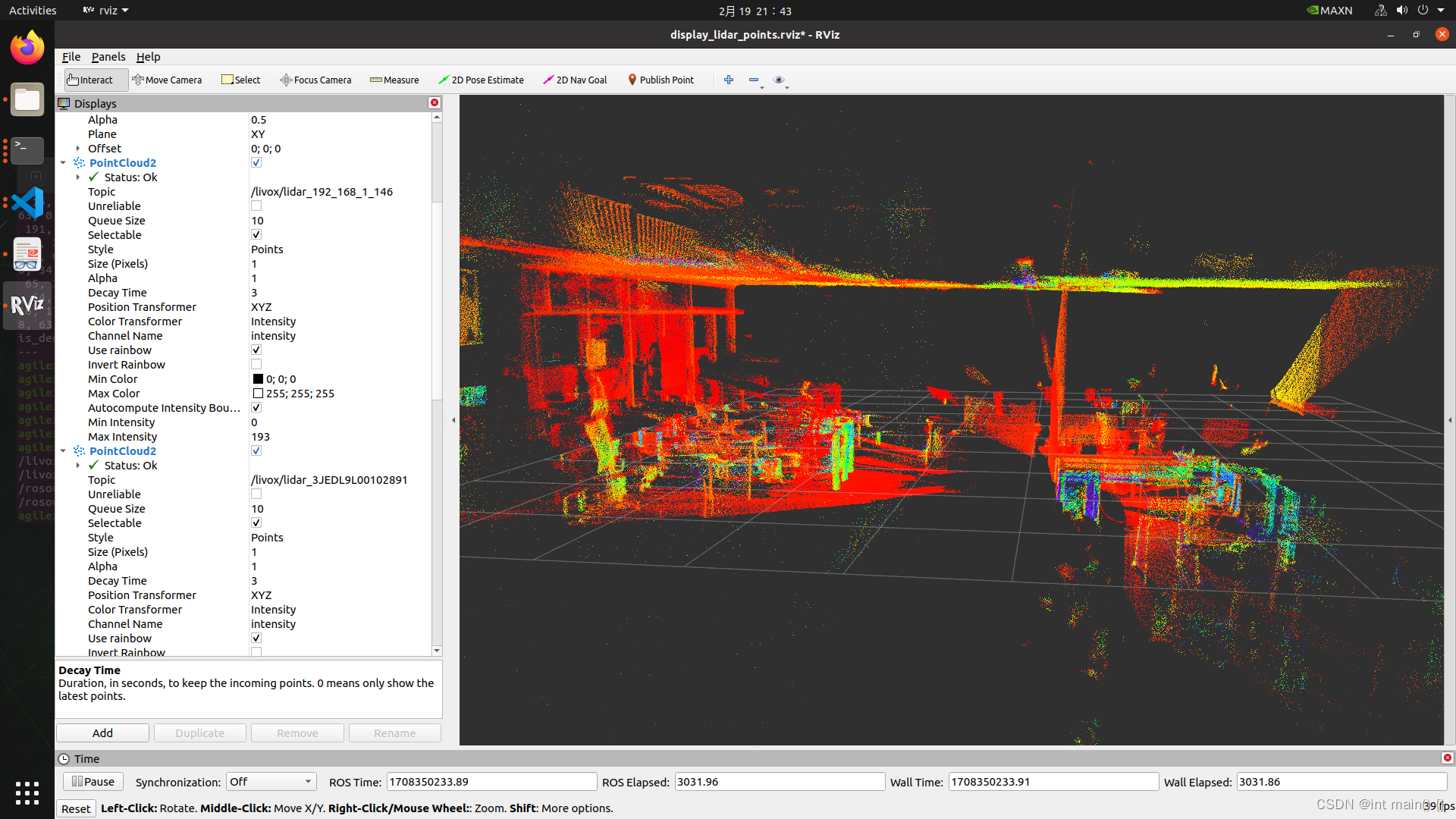
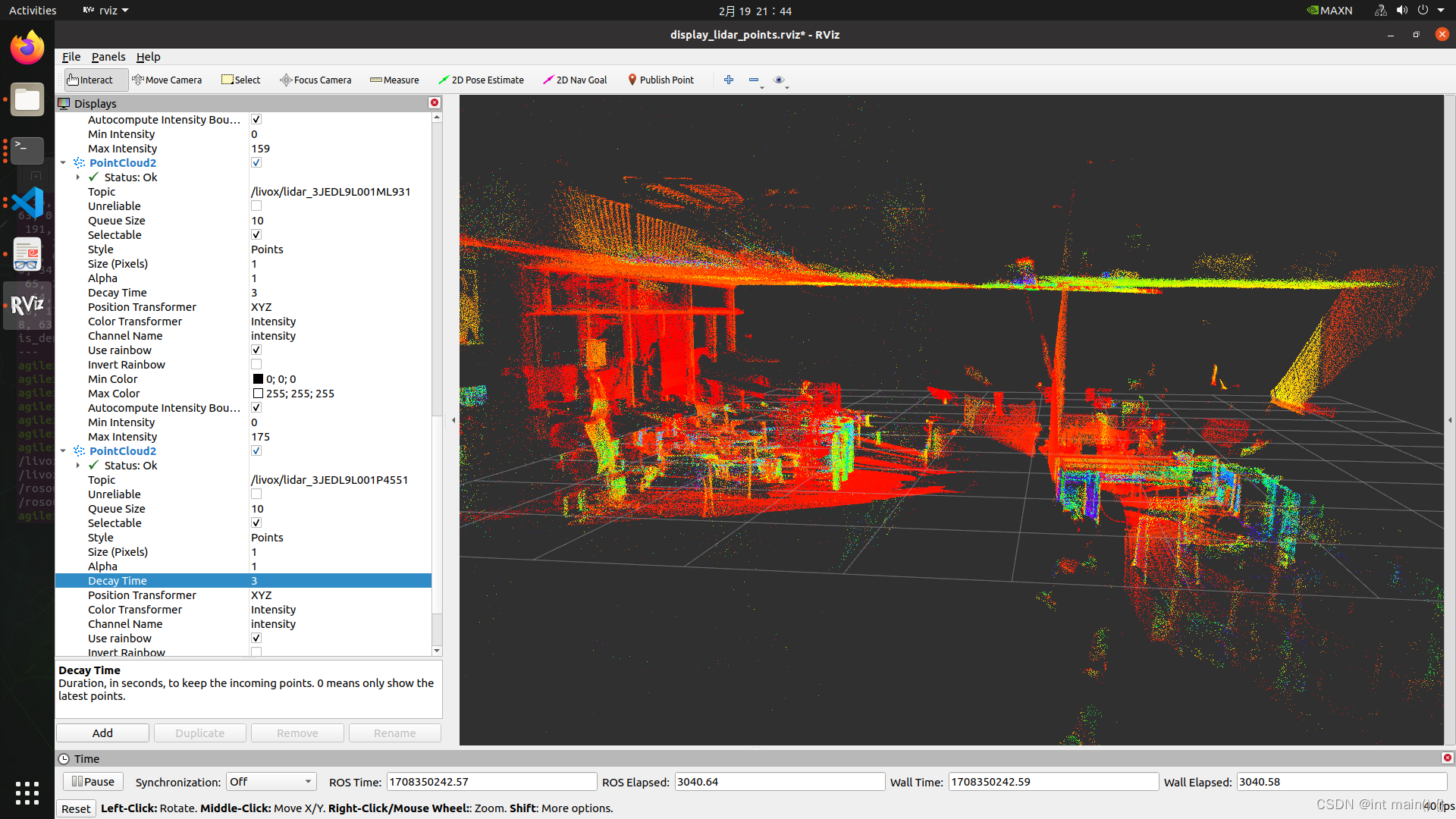
可以看到有四个lidar和两个imu数据推送,同时打开rviz添加pointcloud2,分别添加四个话题
雷达146和891
雷达931和551














 2096
2096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









