






AOI(自动光学检测)检测算法
AOI检测芯片外观缺陷的工作逻辑大致可分为以下四个步骤:
首先,利用CMOS或CCD图像传感器结合多角度光源和镜头,对芯片表面进行细致扫描,获取高分辨率且高对比度的图像;
接着,通过GPU或FPGA处理器对图像进行去噪、校正、分割和增强等算法处理,以提升图像质量;
然后,运用传统图像处理算法和机器学习算法提取边缘、角点、区域等视觉特征,并与正常模板进行比对,以判断是否存在外观缺陷;
最后,生成详细的缺陷分布报告,统计各类缺陷的数量,并分析检测结果和缺陷相关信息。
主要包括以下几种:
-
设计规则检测(DRC):这是一种基于规则的检测方法,通过预设的规则来检测图形是否符合设计要求。例如,检测PCB电路时,会检查所有连线是否以焊点为端点,所有引线宽度和间隔是否符合规定值等12。
-
图形识别检验:这种方法将AOI系统中存储的数字化图形与实际检测图像进行比较,通过比较模板和待检图像中的链接性特征来识别缺陷。如检测PCB电路时,首先按照一块完好的PCB或根据计算机辅助设计模型建立起检测文件(标准数字化图像)与检测文件(实际数字化图像)进行比较。
-
统计建模图像对比:这种方法通过学习一系列OK图像的样本,提取各种图像的变化特征,生成一个综合标准图像及参数标准图像。这种方法能够更准确地识别缺陷,适用于复杂的SMT装配工艺3。
-
粗检测缺陷:通过将模板图像和待检图像进行异或运算,检测出大缺陷(如丢失或多余的大焊盘)2。
图像识别
图像分析技术,随着计算机的快速发展,目前有许多成熟的图像分析技术,包括模板匹配法(或自动对比)、边缘检测法、特征提取法(二值图)、灰度直方图法、博里叶分析法、光学特征识别法等,每个技术都有优势和局限。
检测算法包括图像统计原理、灰阶处理算法和图包色彩分析技术。
算法统计原理:
常用的一种有效的检测算法,几乎所有的检测都可用到该算法,该算法就是利用OK样本的累计学习和色彩对比来进行检测和判断。
灰阶处理算法:
是指亮度缝隙和拥挤算法,该算法包括最大值算法、最小值算法、亮度跨度算法、均值算法和亮度抽取算法。
图像色彩分析技术:
就是指分析和处理图像的颜色,主要是通关图像的色彩分布和色彩特征来进行检测和判断,主要包括色彩抽取算法,波峰焊产检算法、红胶分析算法、孔洞缝隙算法等。
检测算法
检测算法有 TOC、 Match、 OCV、 OCR、 Length、 Histogarm 等检测算法
TOC
检测焊点是否具备爬锡现象
爬锡区域的色彩特征为亮度低、色度偏蓝。对于少锡的检测采用的算法为“TOC 算法”
焊现象的色彩特征为亮度亮、色度偏红。对于空焊焊的检测采用的算法为“TOC 算法”
OCV
一种基于图像轮廓分析的算法,它比较待测图像的轮廓线与标准样本的轮廓线以判断它们的相似度。这种算法非常适用于检测错误组件或缺失组件等缺陷,并且它的主要作用是分析和拟合轮廓以判定测量点。
Match
专注于分析待测图像中ROI(感兴趣区域)的图像点与标准样本中对应图像点的相似度。该算法广泛用于定位、错件和缺件检测等领域。
Length
一种测量算法,专门用于计算亮度区域之间的距离。根据测量方式的不同,它进一步分为内距法和外距法。通过对ROI区域进行亮度投影,并统计投影直方图中亮度区域间的距离,我们可以得出精确测量结果。
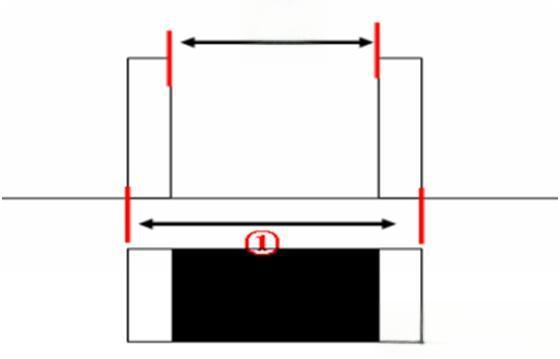
在上述图像中,①代表了外距法,测量两个亮度区域外边界之间的间距;②代表了内距法,关注两个亮度区域内边界之间的距离。Length算法特别适用于检测如电容元件等的缺陷。
评价指标
AOI检出率=1-(漏检器件数/总缺陷器件数)X100%
定位算法
https://zhuanlan.zhihu.com/p/698627354
定位,波峰焊中的插件变化大,常规的定位方式不适合插件的定位,所以CREST的定位算法,为特色的定位的方式。该定位方式分为2步,其一是创建定位模板,该定位模板一般为椭圆形;其二是提取焊锡,将焊锡之外的色彩设置为背景。利用在提取焊锡的搜索图中查找与模板拟合最好的区域。
3D AOI
2D AOI主要依赖面阵或线阵相机从单一角度捕捉芯片的2D图像;
而3D AOI则通过多视角或结构光技术获取芯片的3D立体图像。
由于3D AOI能够捕获更丰富的三维信息,因此在缺陷检测方面展现出更高的准确性和全面性。具体优势包括:(1)检测范围更广,3D AOI能从多个角度扫描芯片,覆盖所有三维空间,有效避免2D AOI可能存在的“死角”;(2)检测精度更高,基于三维图像的3D AOI比对检测更为精确;(3)能检测出更多类型的缺陷,如错位、形变、翘起等三维形状方面的缺陷,这些缺陷在2D AOI中可能难以察觉;((4)图像效果更佳,3D AOI生成的三维视图更直观,有助于快速定位和识别缺陷。

















 328
328

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









