







本堂课以及之后的几门课都是从软件层面讲。
技术入门
什么是无人车自定位系统
相对于一个坐标系,确定无人车的位置和姿态
坐标系:可以是一个小地图里的坐标,也可是全局坐标
位置:XYZ
姿态(pose):相对三个方向的旋转角度
指标要求
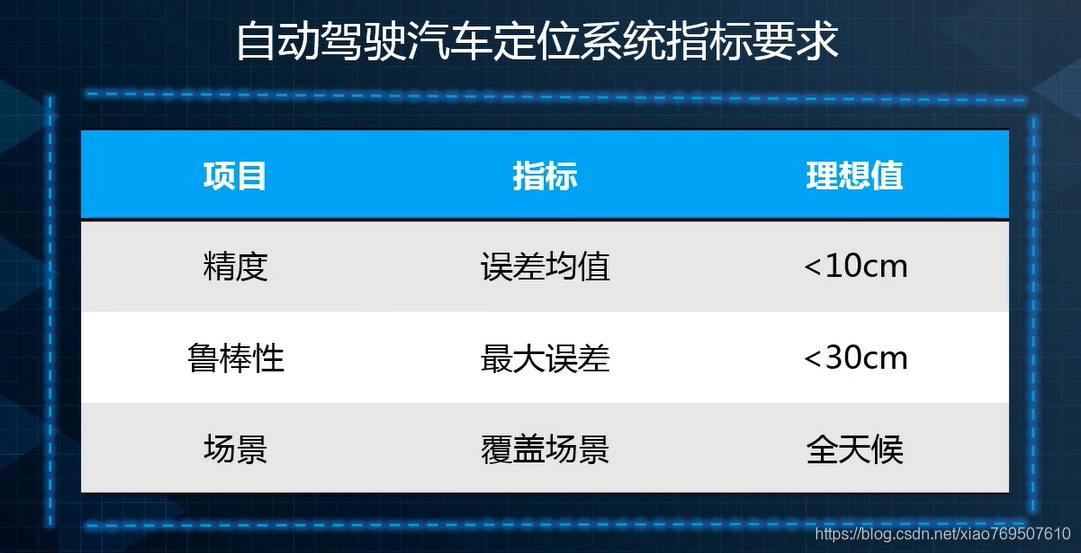
精度得高:怕他偏离车道太远,造成事故
鲁棒性:最大误差,对纵向误差的要求,没横向那么高
场景:全天候,任何天气、任何场所(比如林荫道、隧道、地下车库等GPS不好的地方)
为什么无人车需要精确的定位系统
- “无人车是个大近视”
- 定位系统会告诉车辆自己的速度、加速度、角速度等信息(?速度不是自己可以知道吗)
一些定位方法
- 基于电子信号定位:比如(GNSS也就是GPS)
- 航迹推算:比如IMU(对前面的一些补充:陀螺仪可以提供瞬时角速度)
- 环境特征匹配:比如LiDAR产生的点云信息和已经建立好的点云地图做匹配
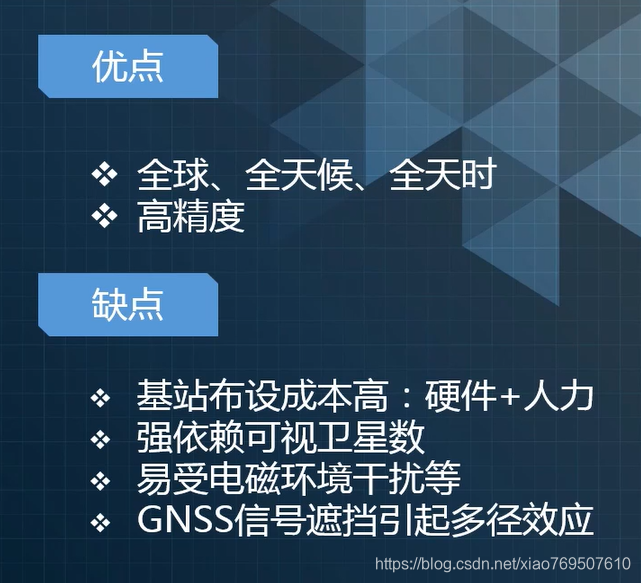
GNSS
伪距差分:距离差分,米级
载波相位差分:小于5cm
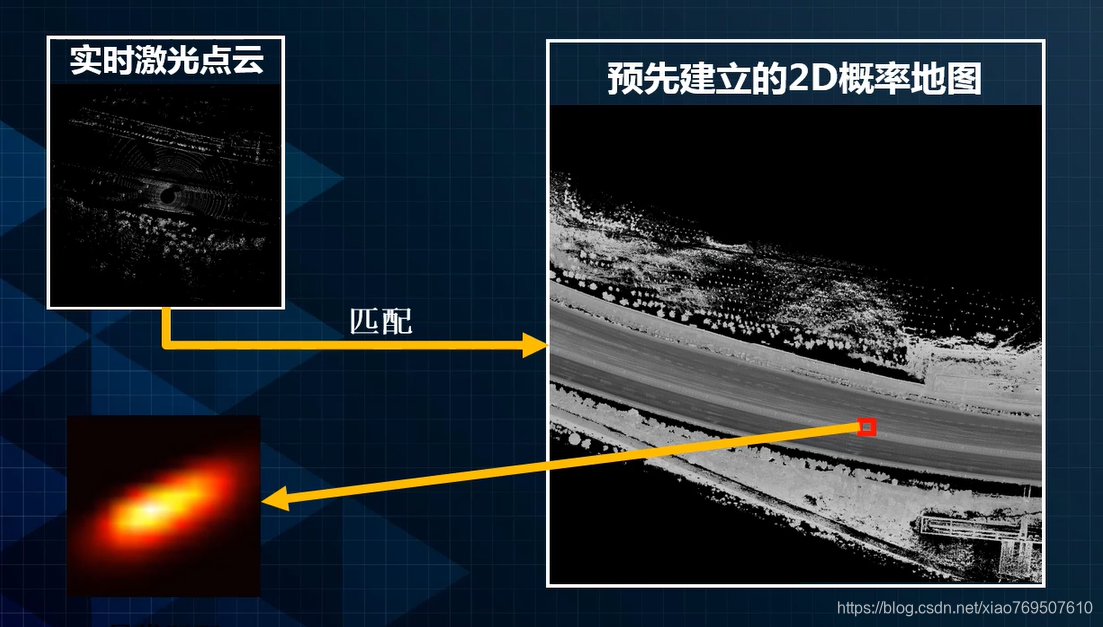
激光定位
2D概率地图:每个小格子包含了颜色、位置信息(Z轴)、概率
匹配:拿出一块做对比
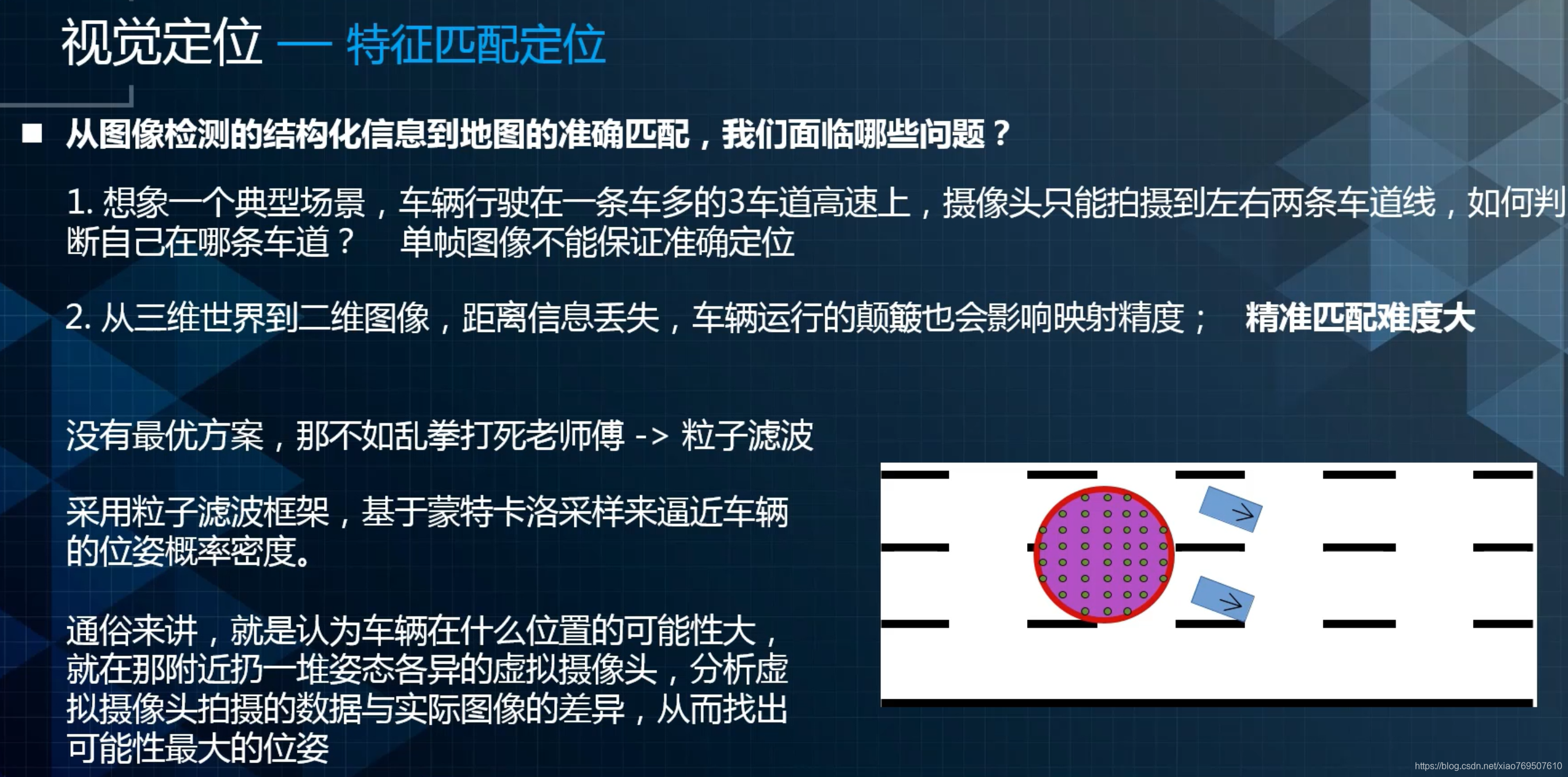
视觉定位
算法流程图
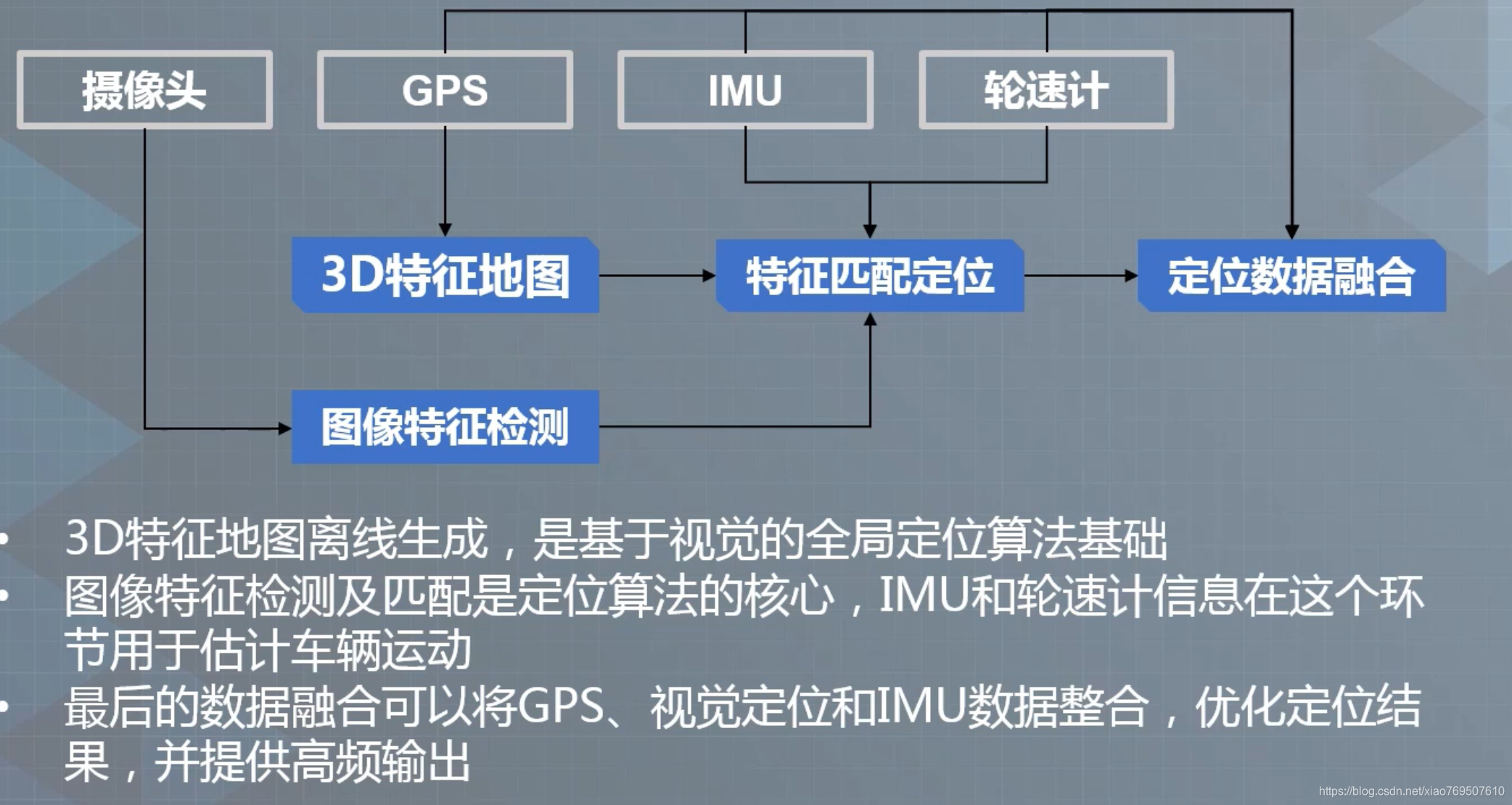
在线特征检测(车道线+杆状物)
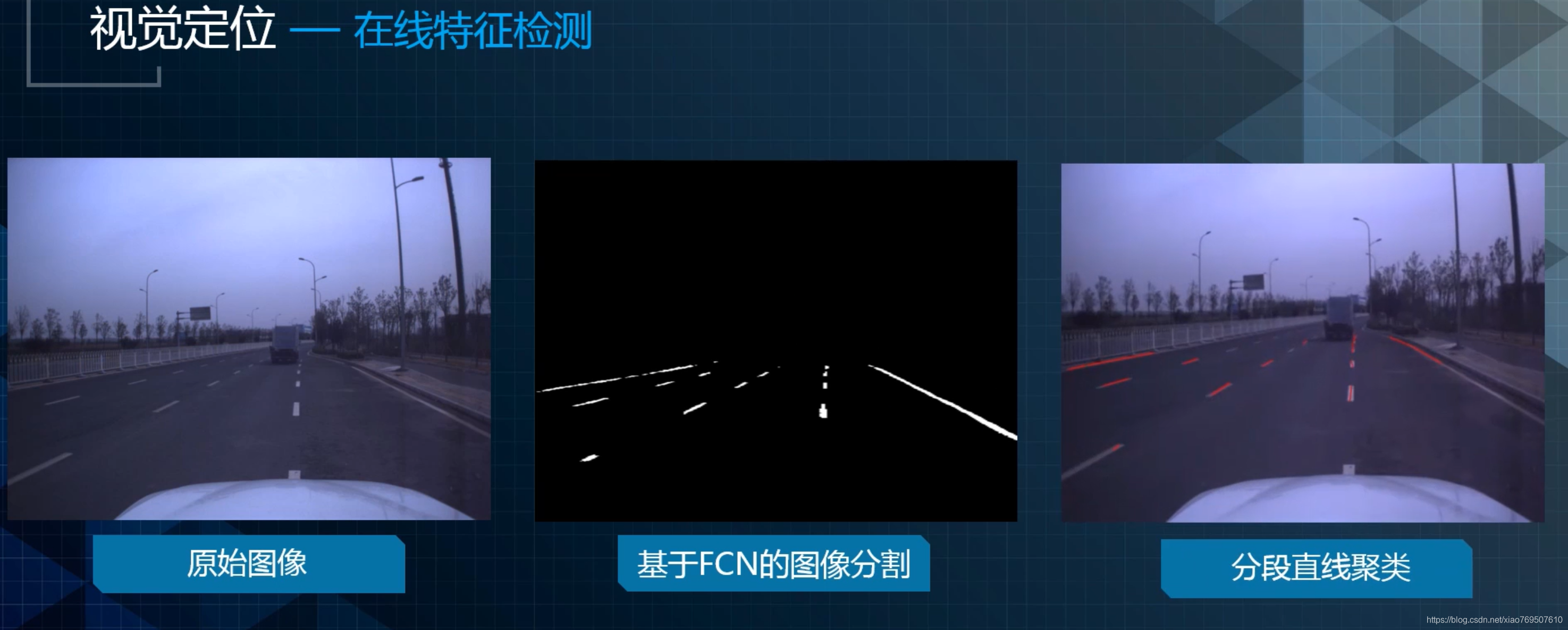
特征匹配
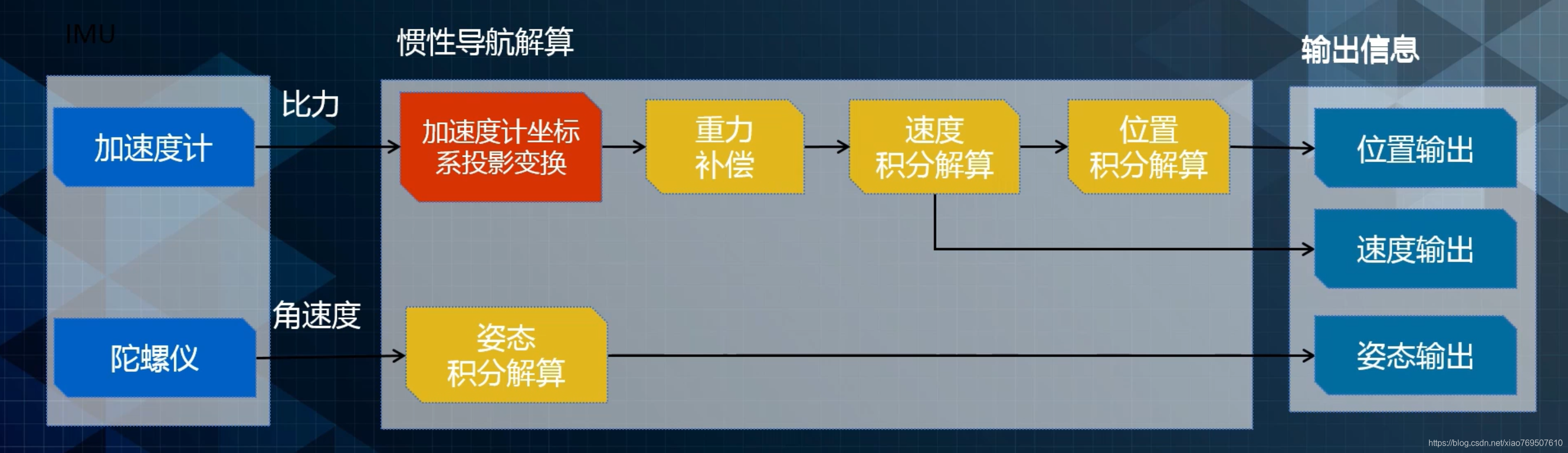
IMU
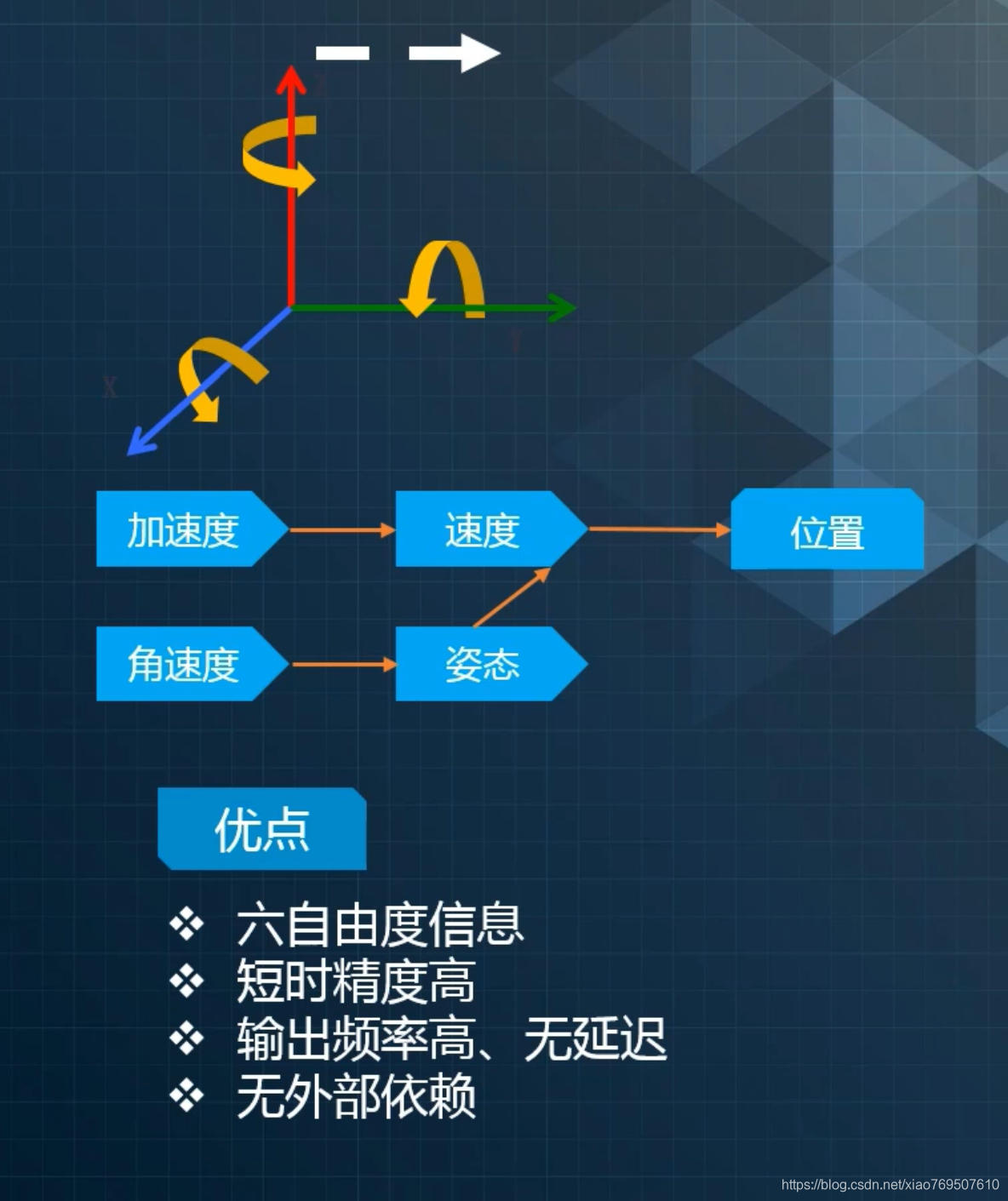
六自由度:xyz yaw row pitch
缺点:误差随时间累积
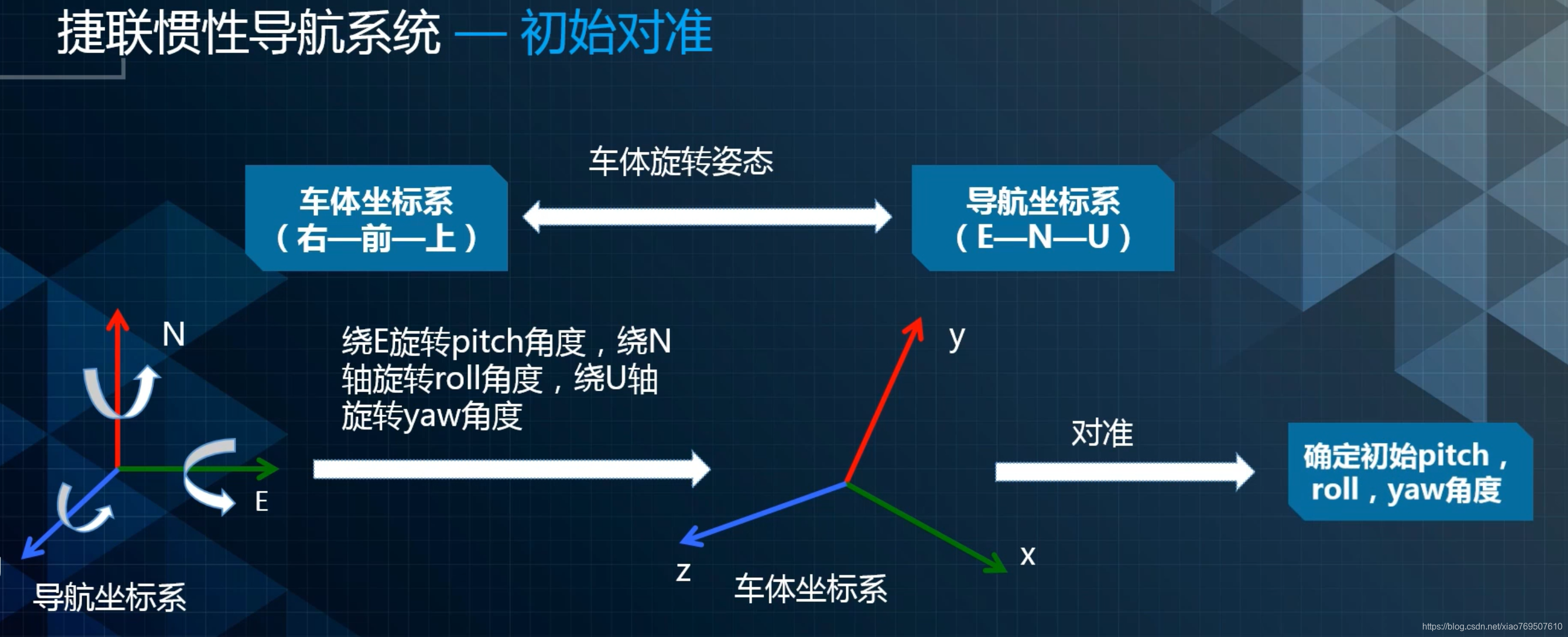
初始对准
计算
基础知识
三维几何变换
坐标系
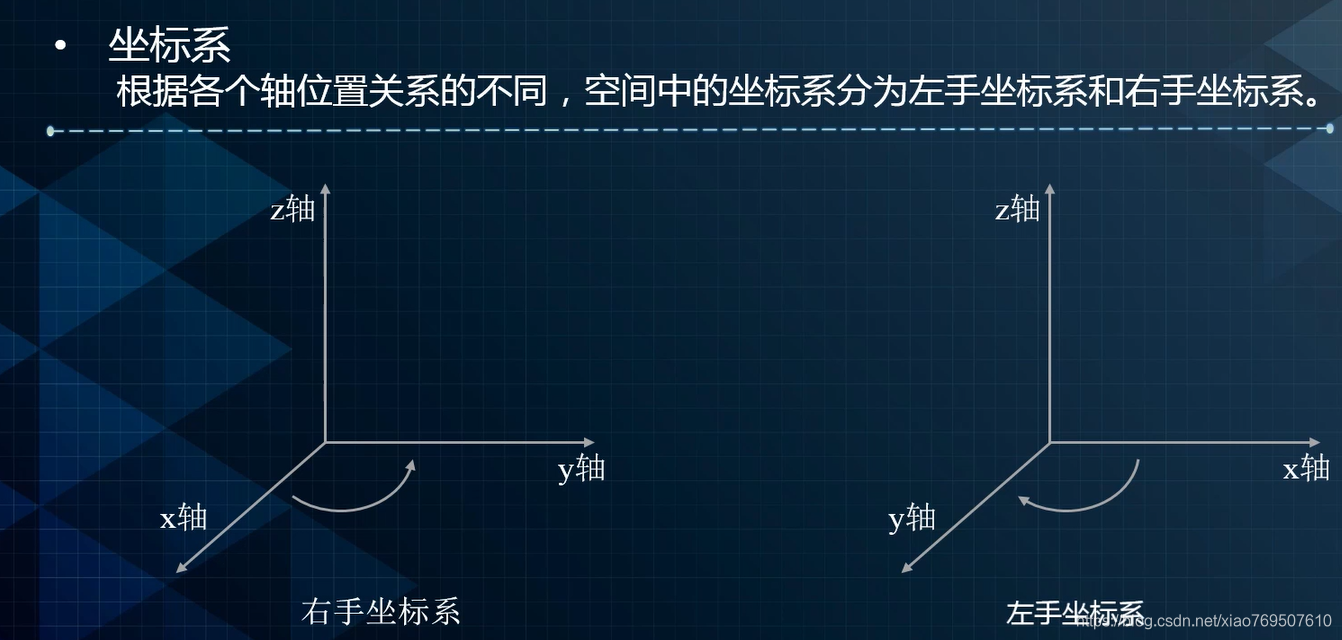
大部分用的都是右手坐标系
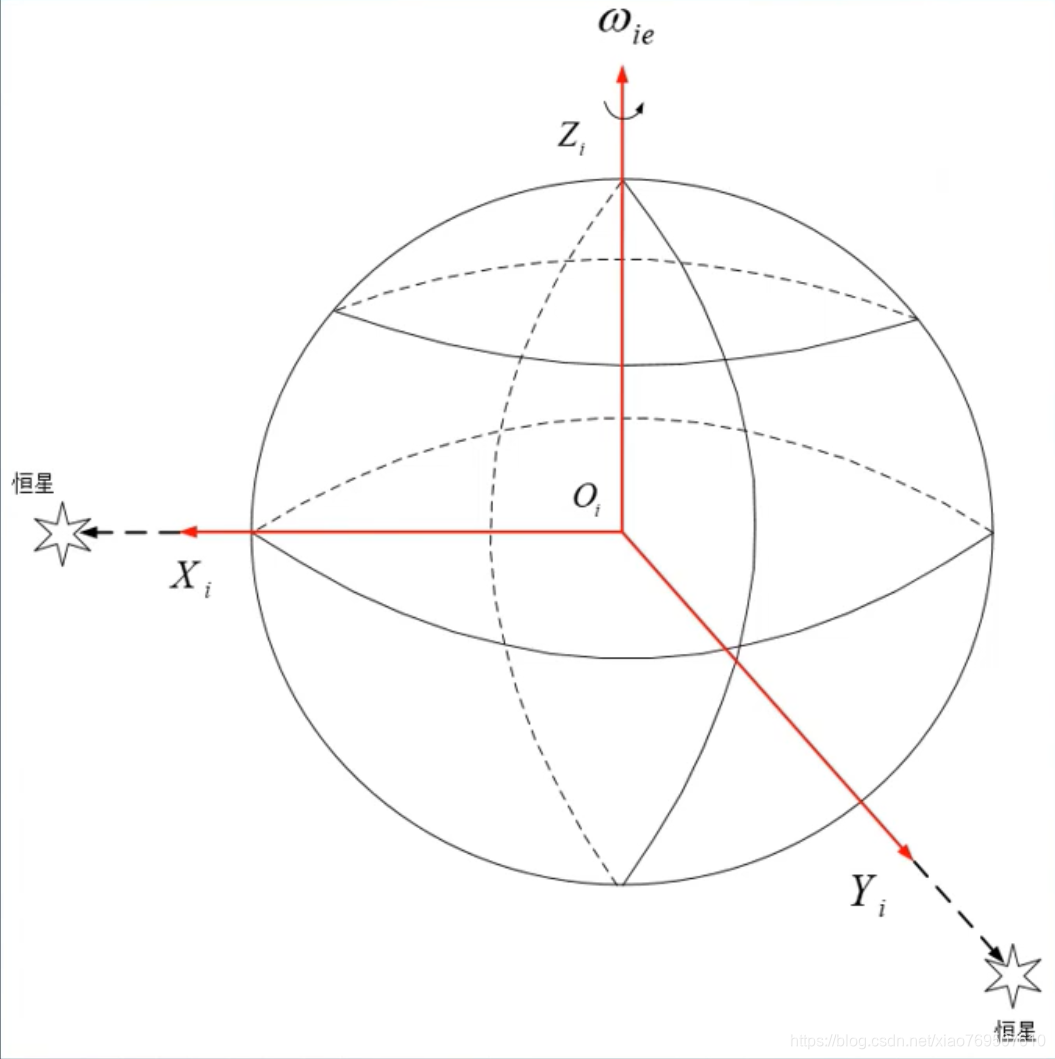
其他常用的坐标系:
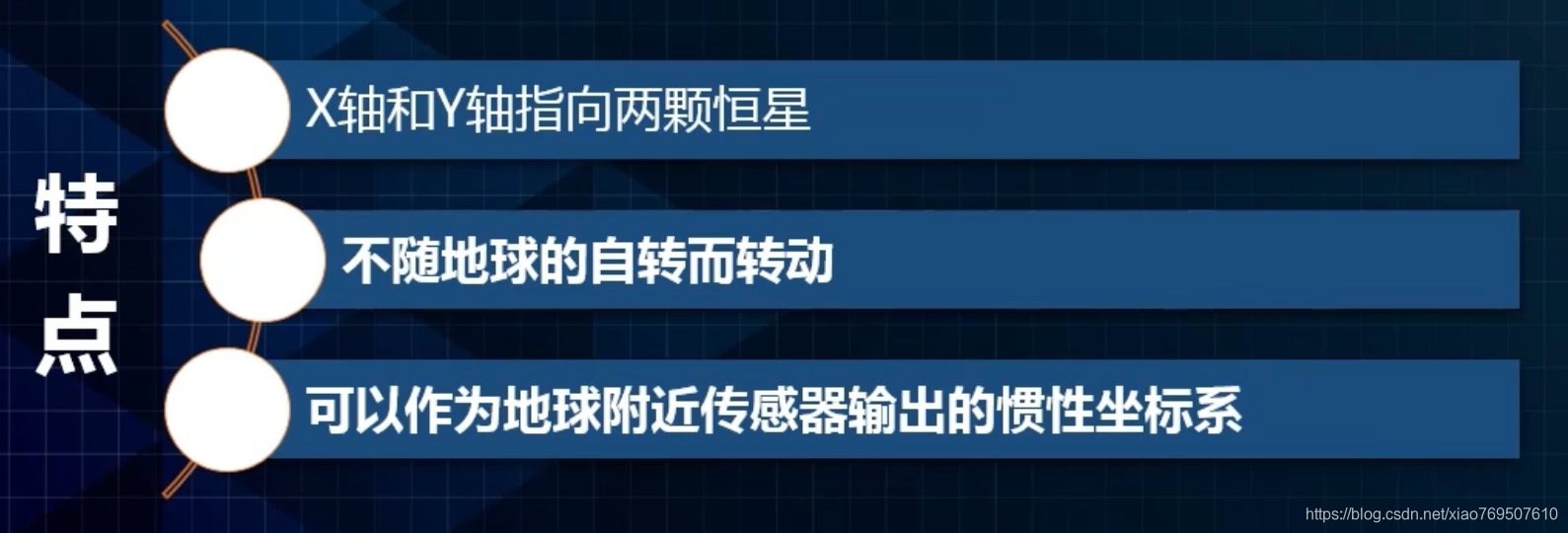
ECI(I型)
ECEF(地心地固坐标系,E型)
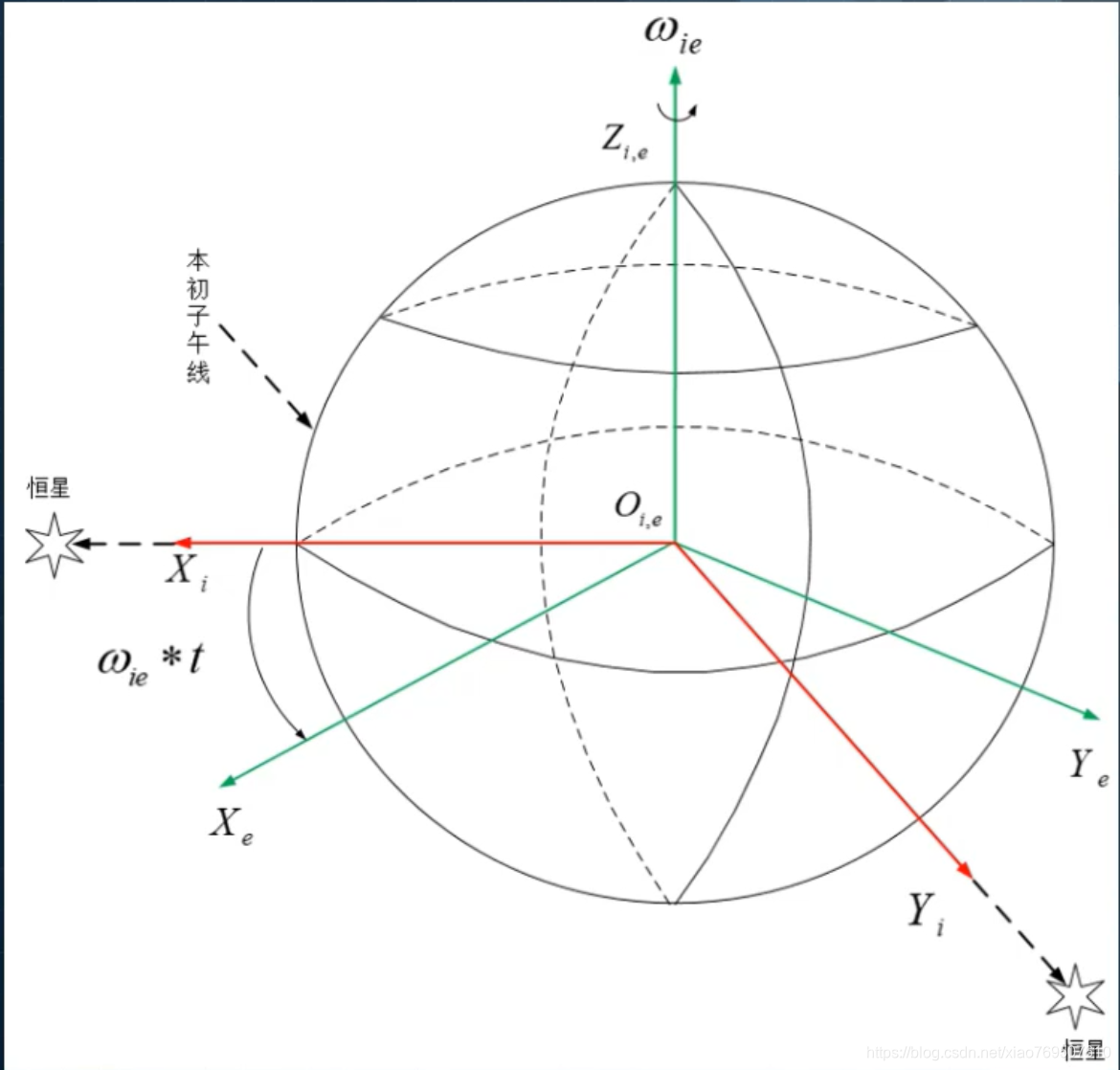
x轴在子午线上
当地水平坐标系(L型)
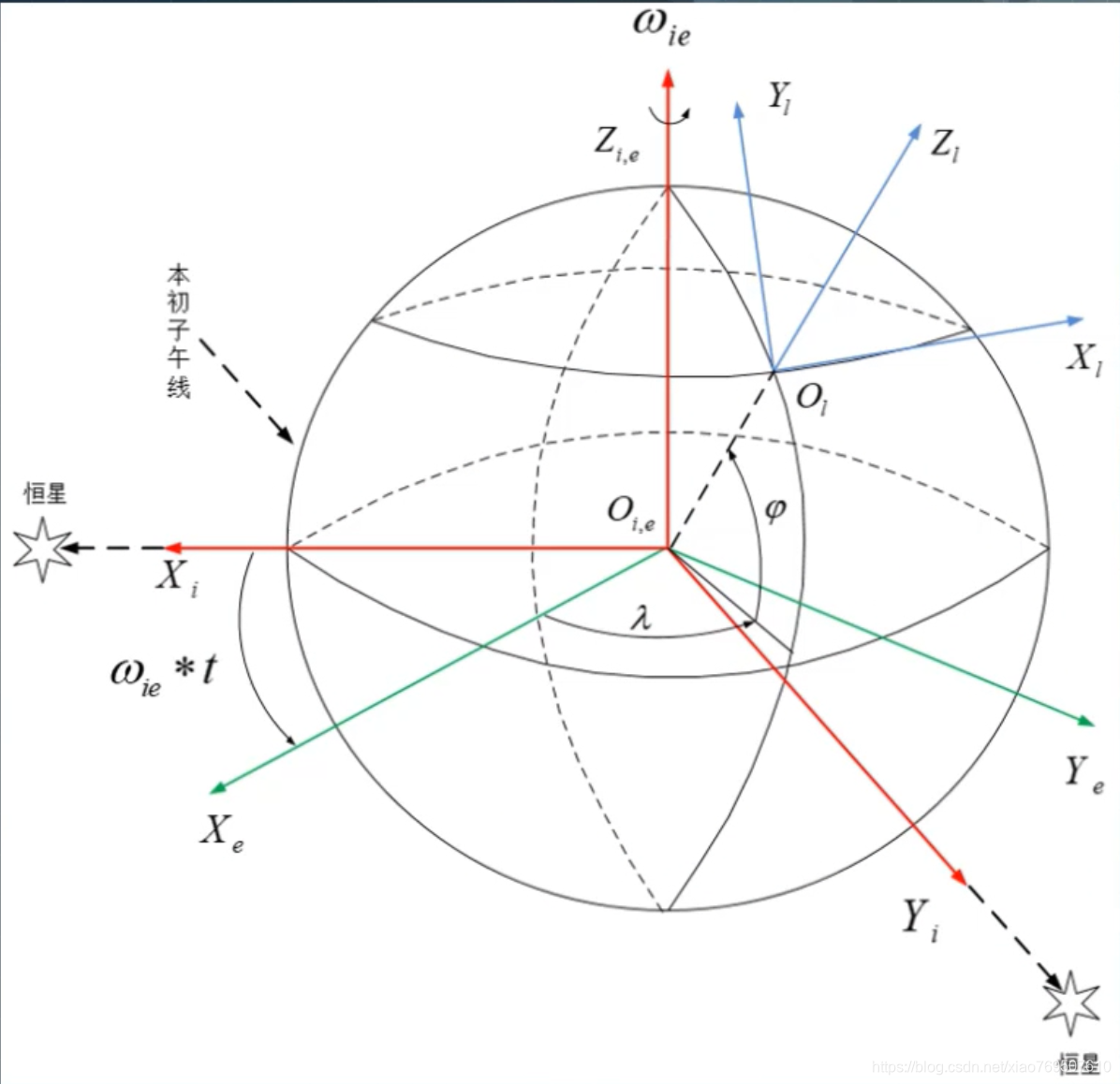
原点在载体上
UTM坐标系
平时定位所输出的坐标系
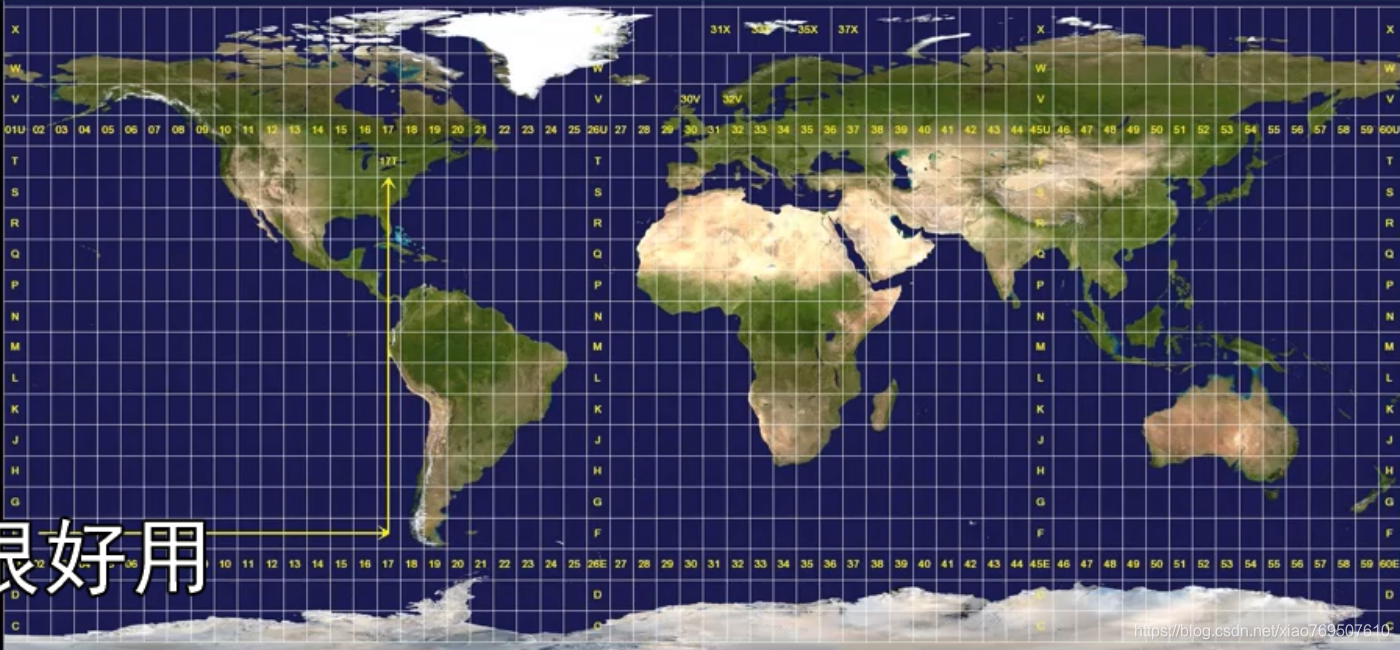
知道代号、XY坐标,就能换算成大地坐标系XYZ
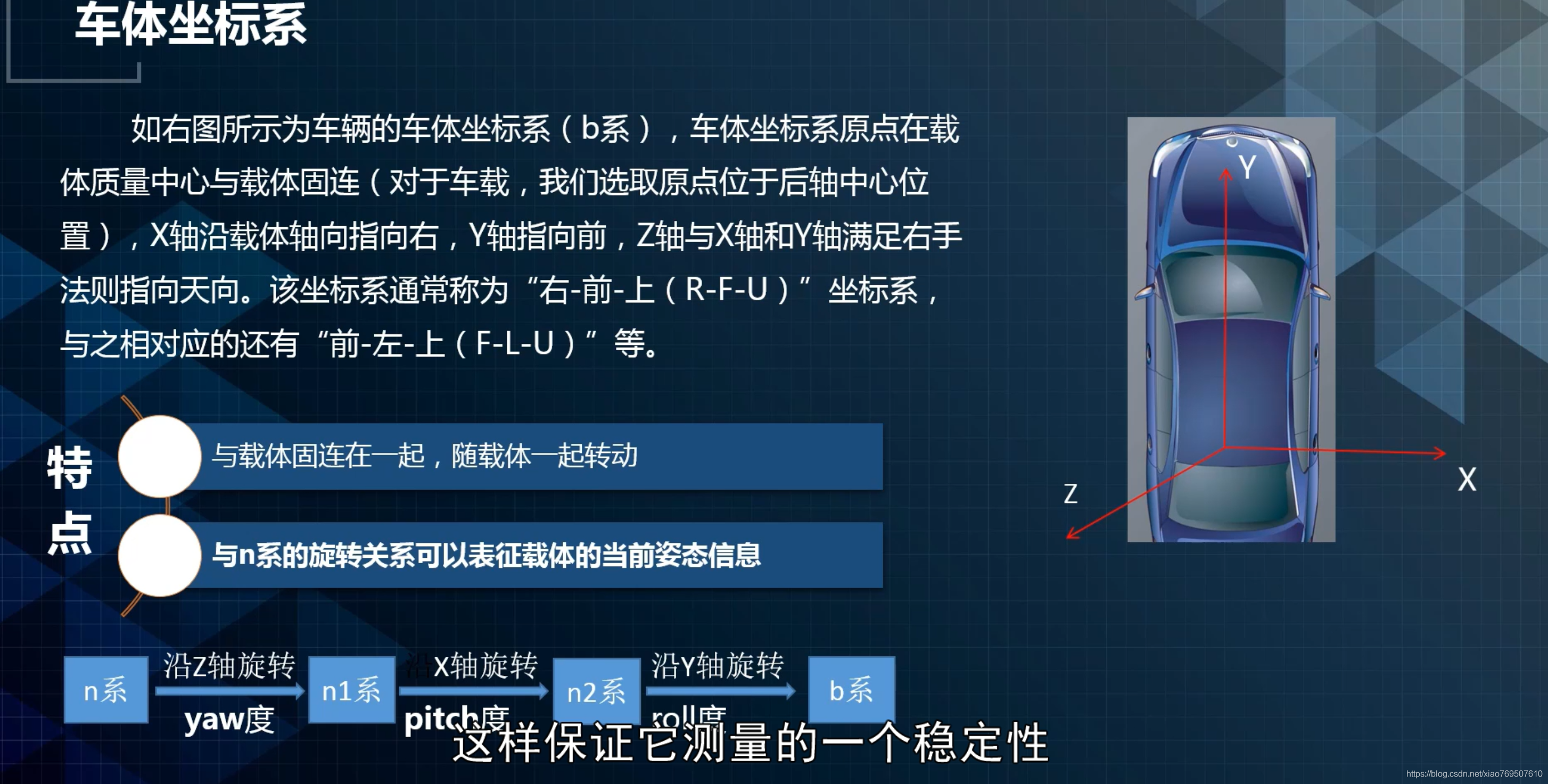
车体坐标系
相机坐标系

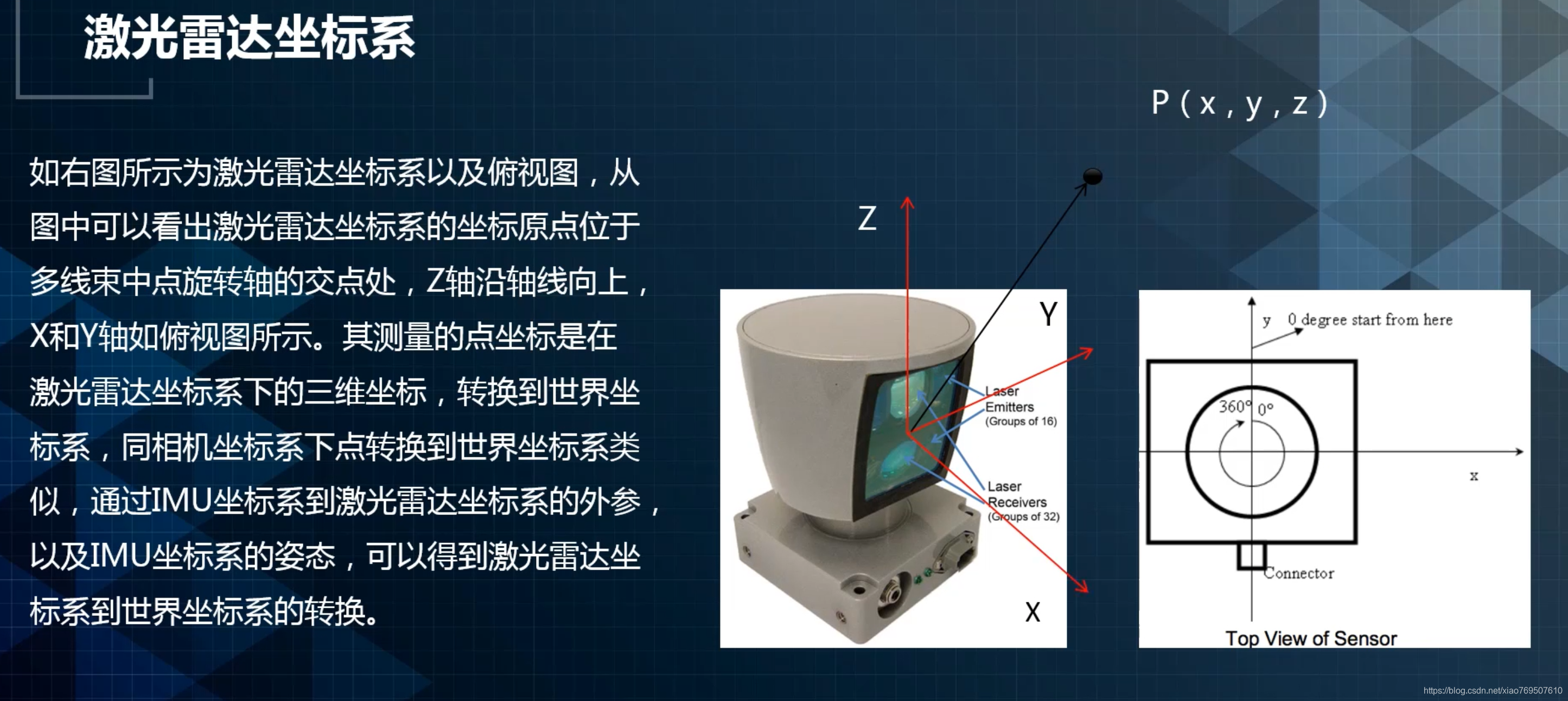
激光雷达坐标系
旋转
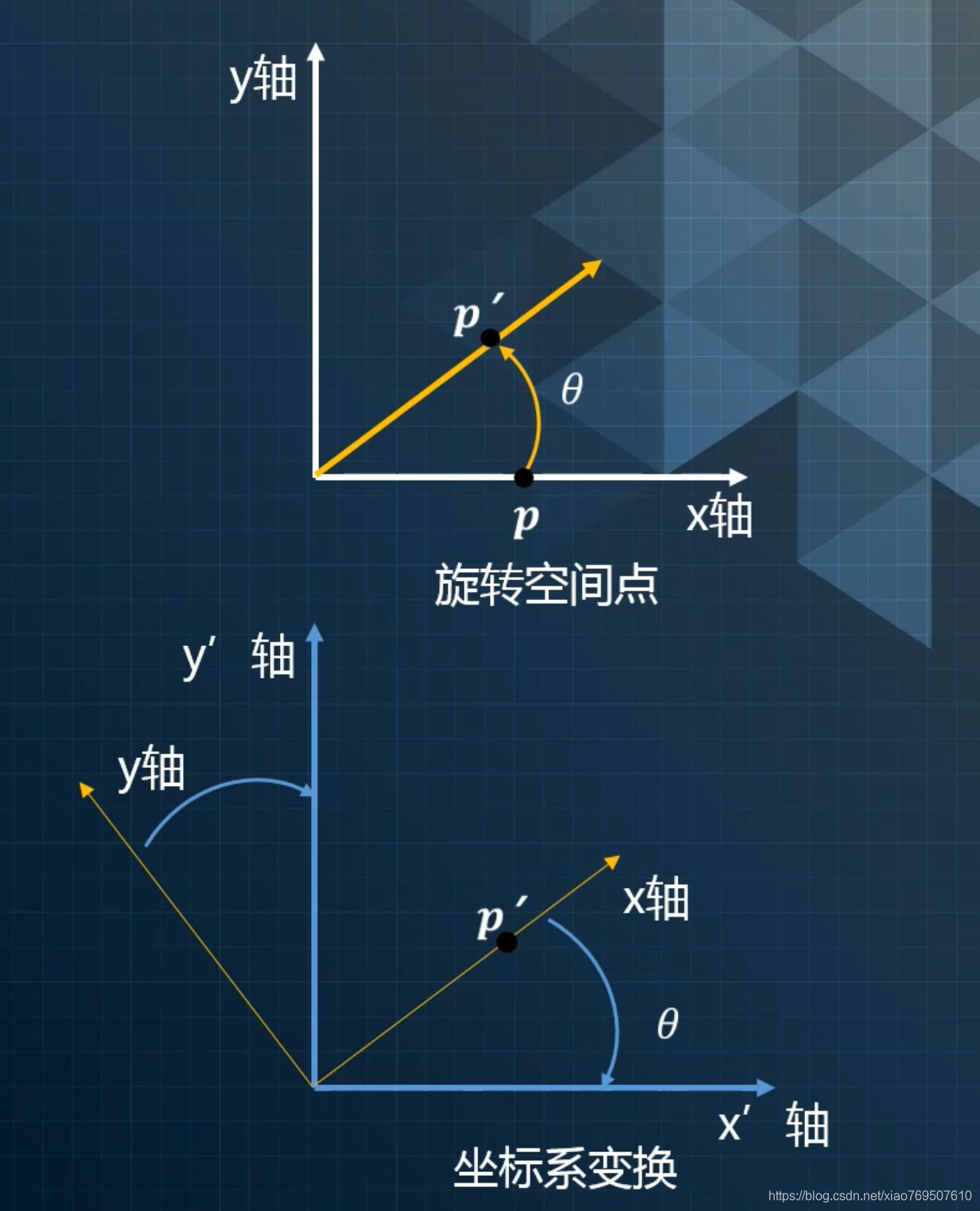
二维旋转
旋转θ°的旋转矩阵
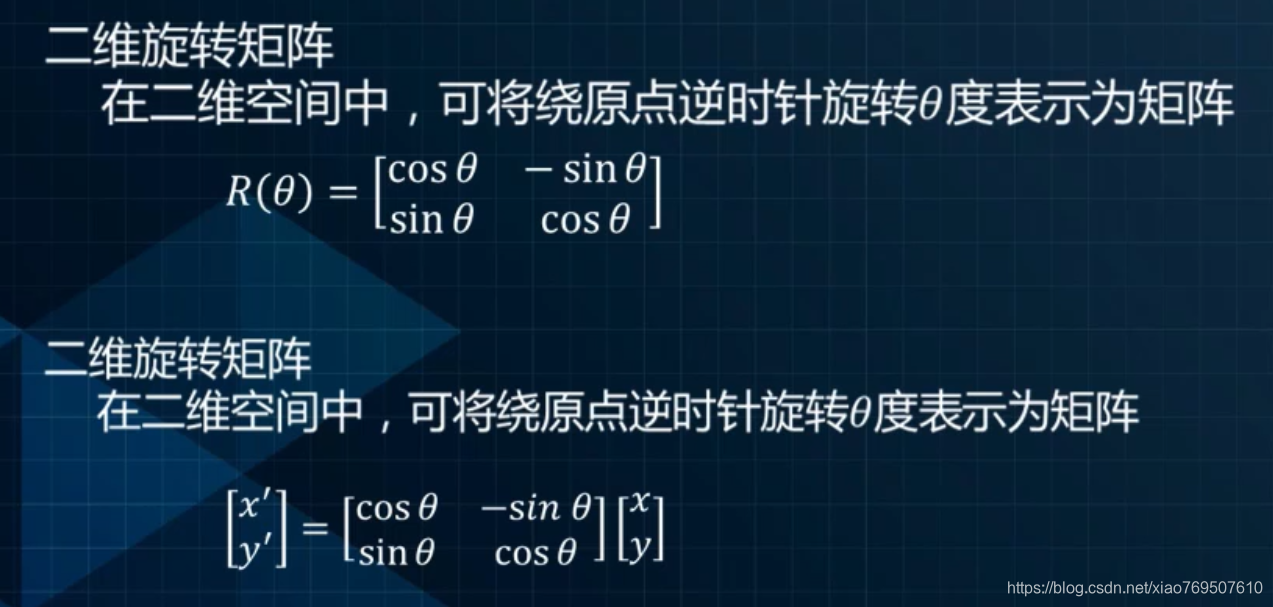
可以理解成点动,坐标系不动;或者坐标系动,点不动(点和坐标系的相对位置不变)变换
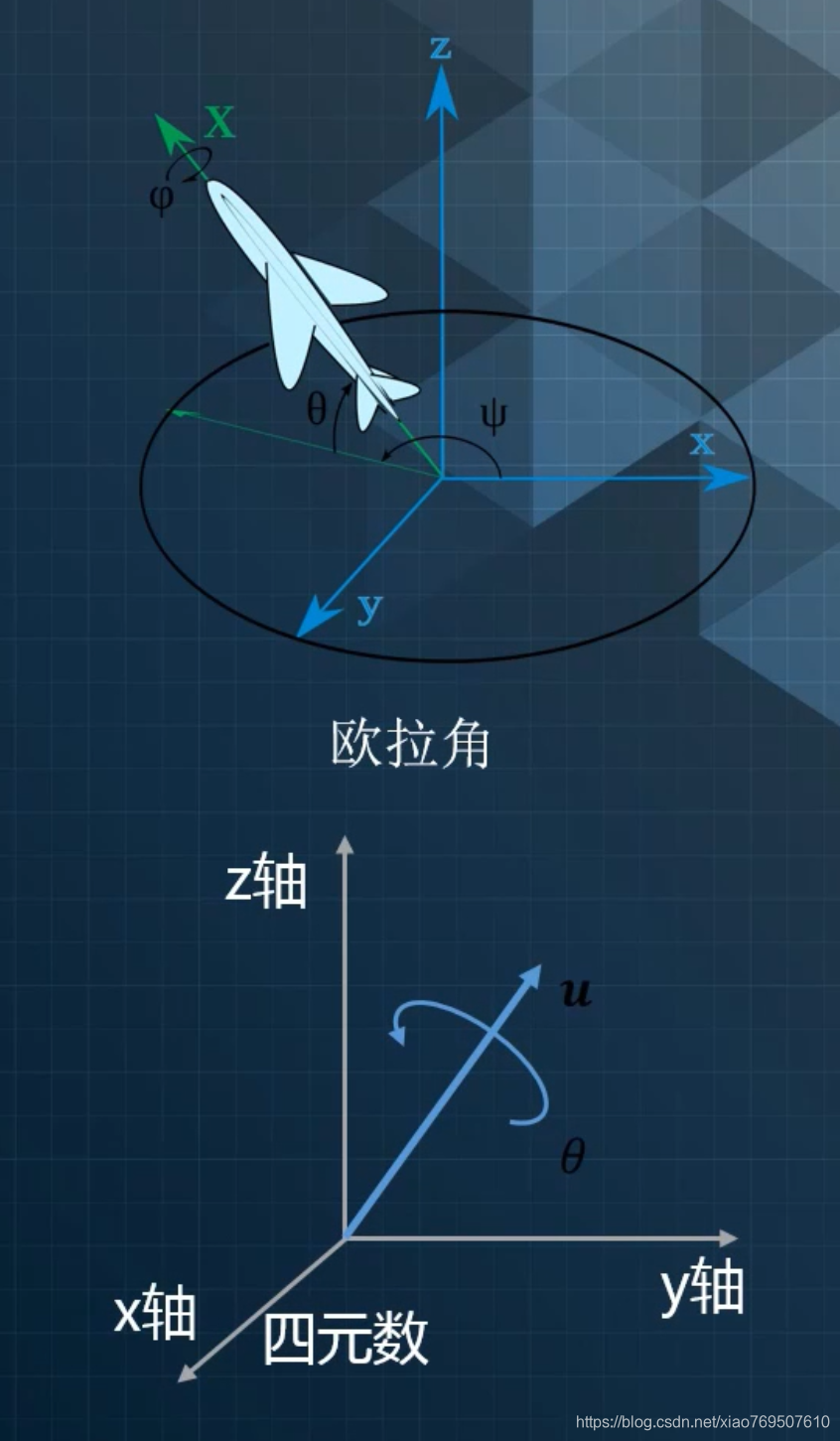
三维旋转
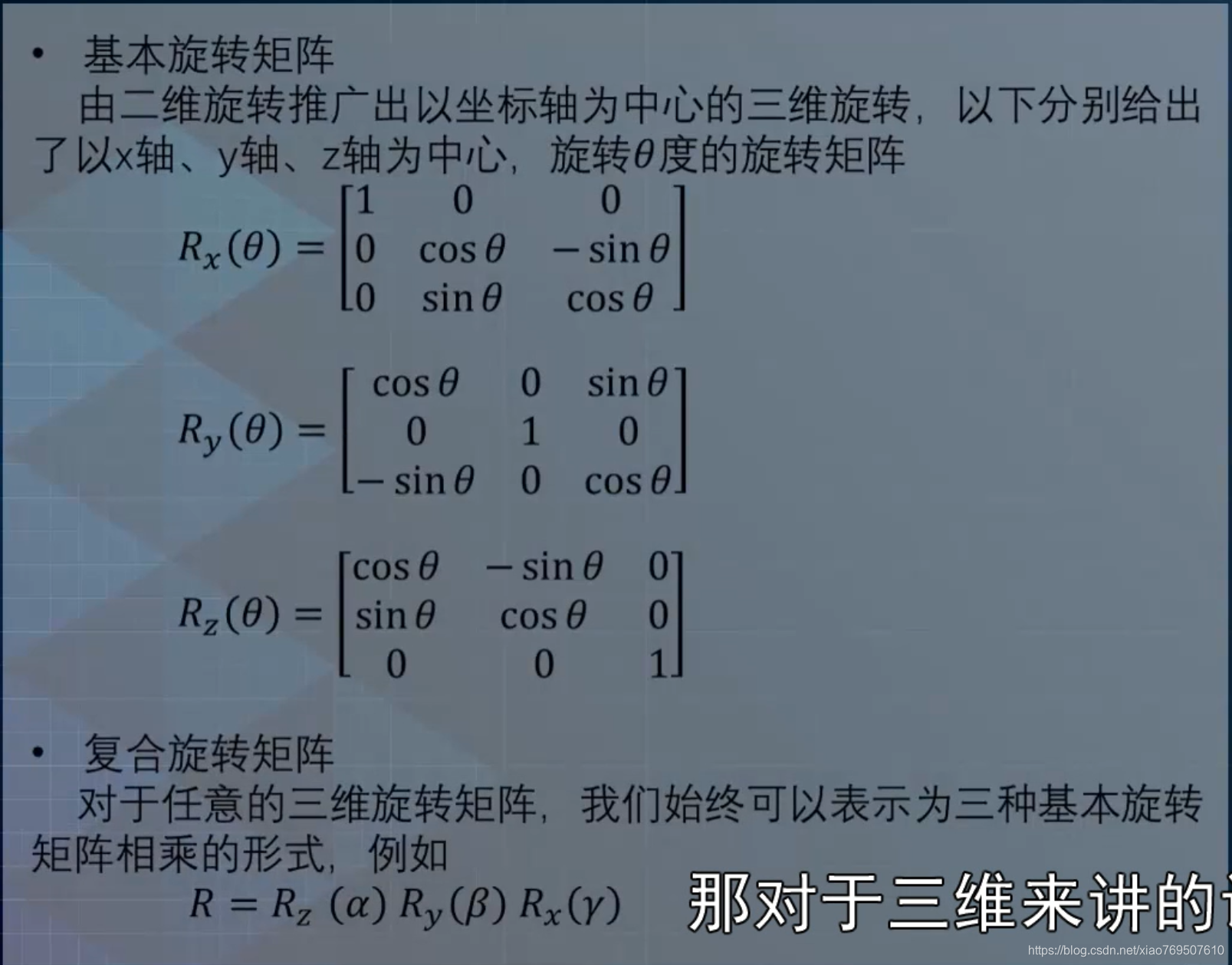
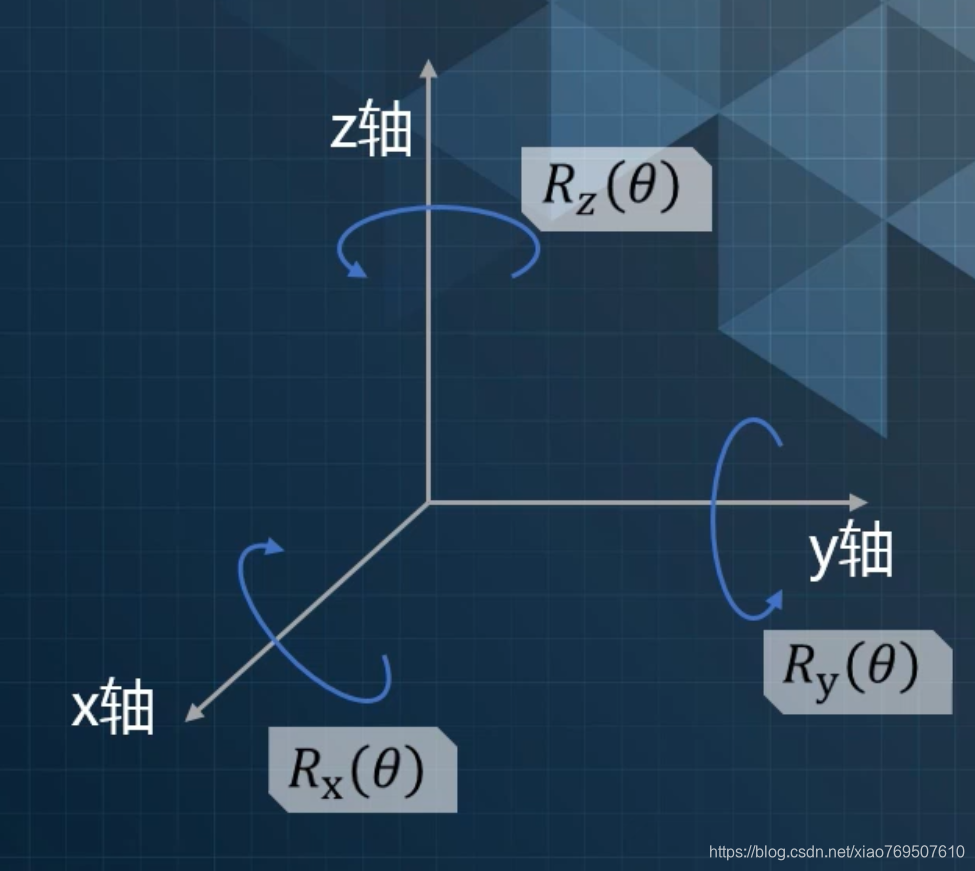
- 欧拉角
- 四元数
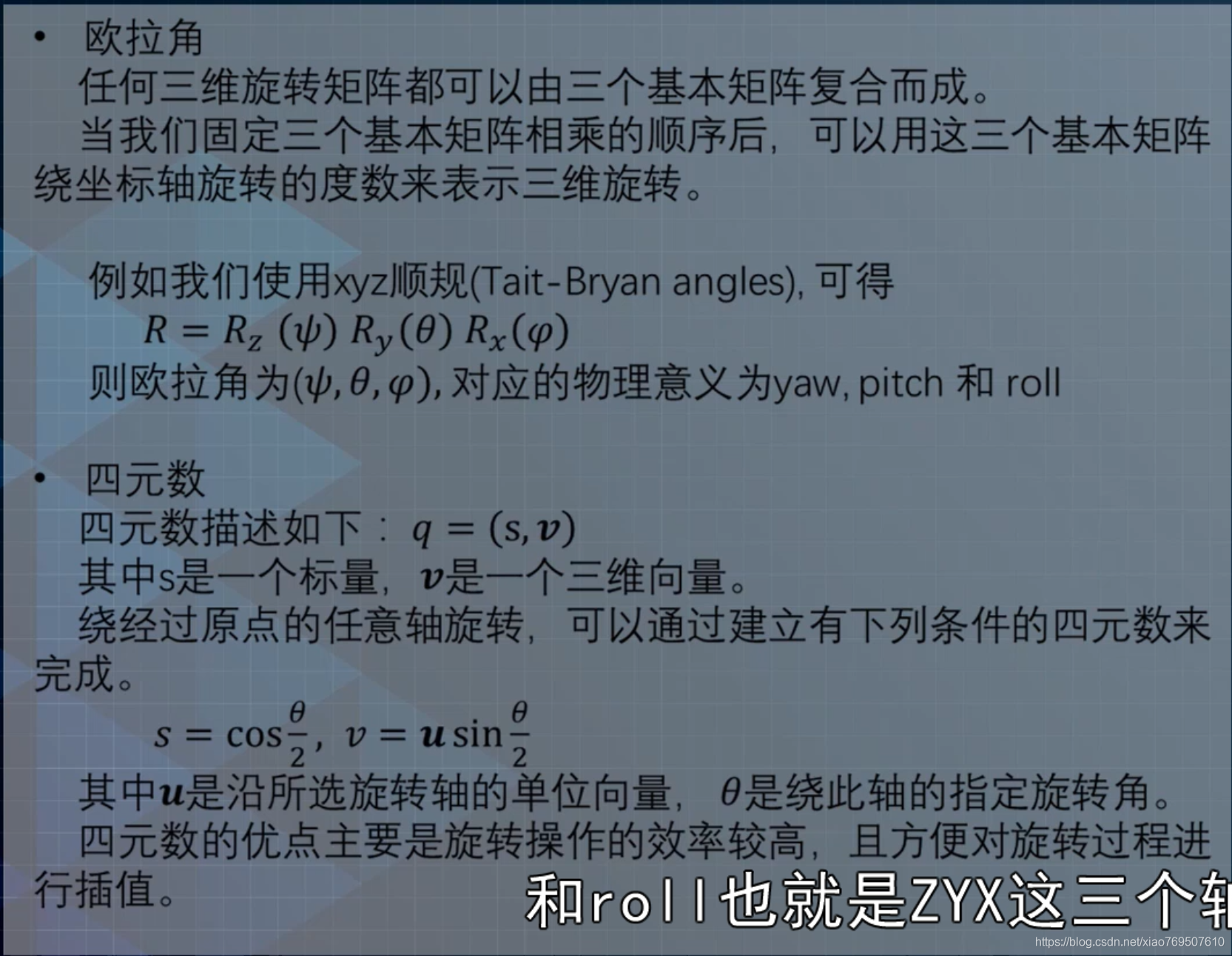
s:scale,cos(θ/2)
v:向量本身的朝向乘上sin(θ/2)
四元数的优点:旋转效率高、可以插值
三维平移
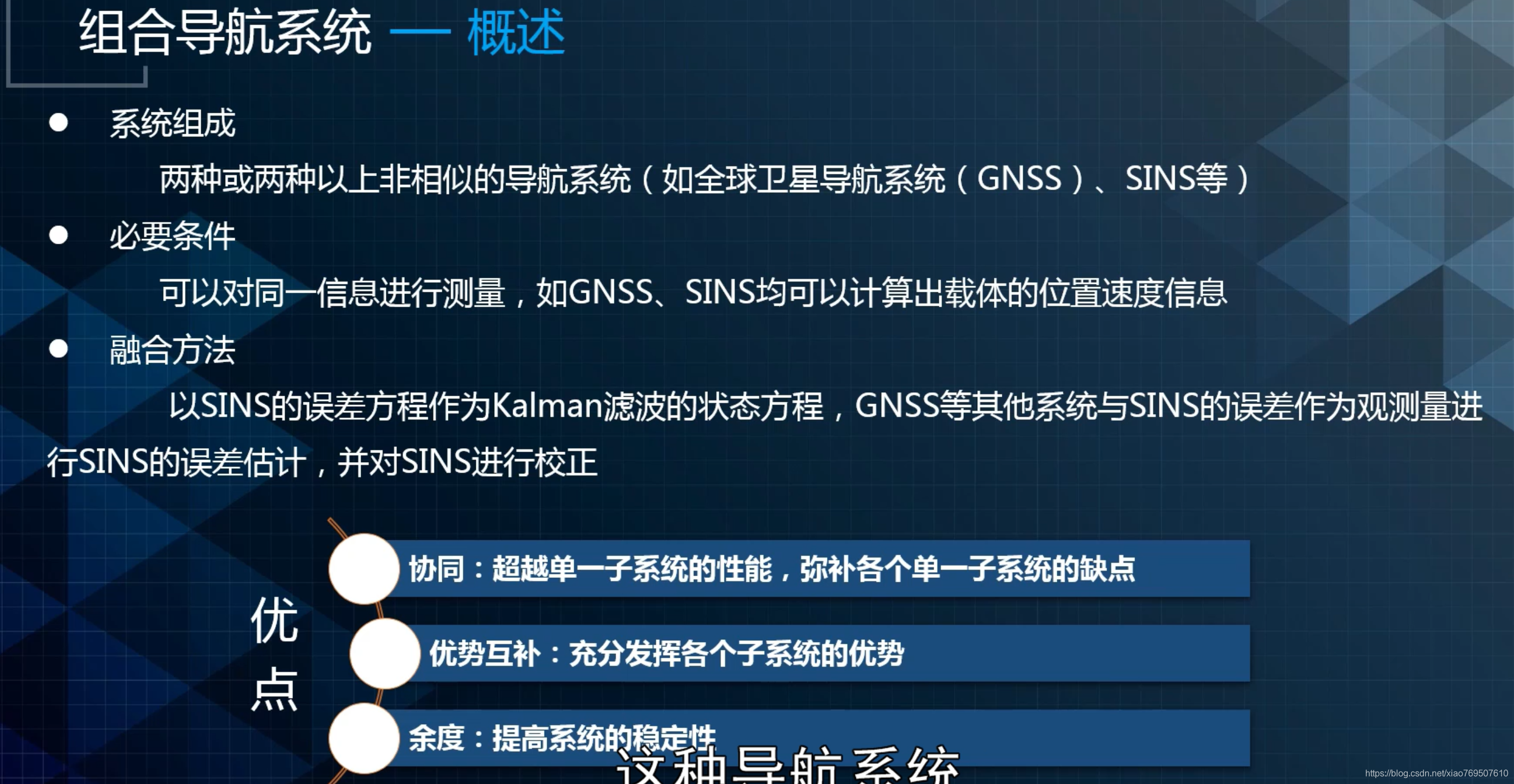
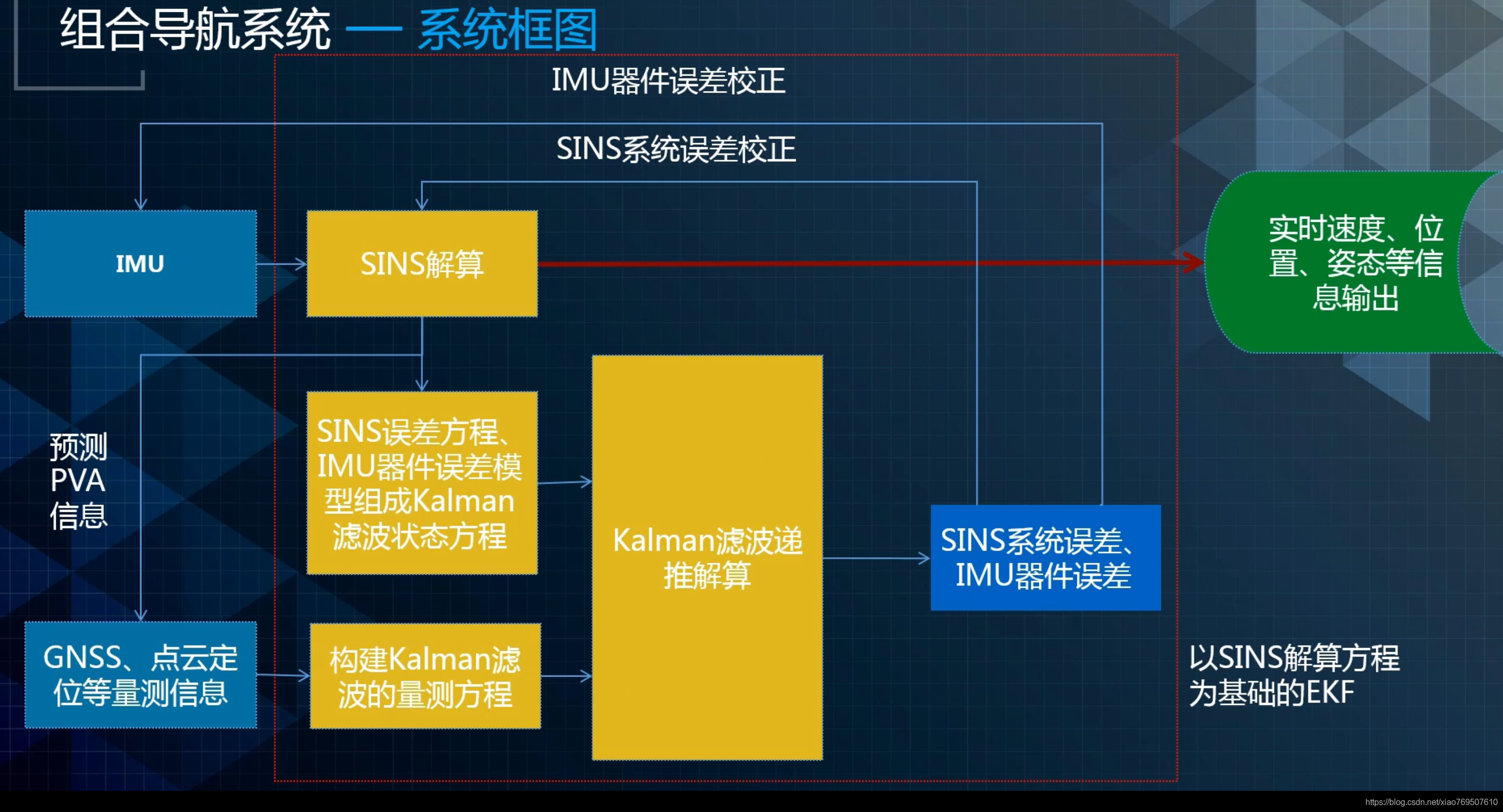
组合导航系统














 3271
3271











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









