







什么是传感器?应用于自动驾驶汽车上的传感器有哪几种?
感知概貌
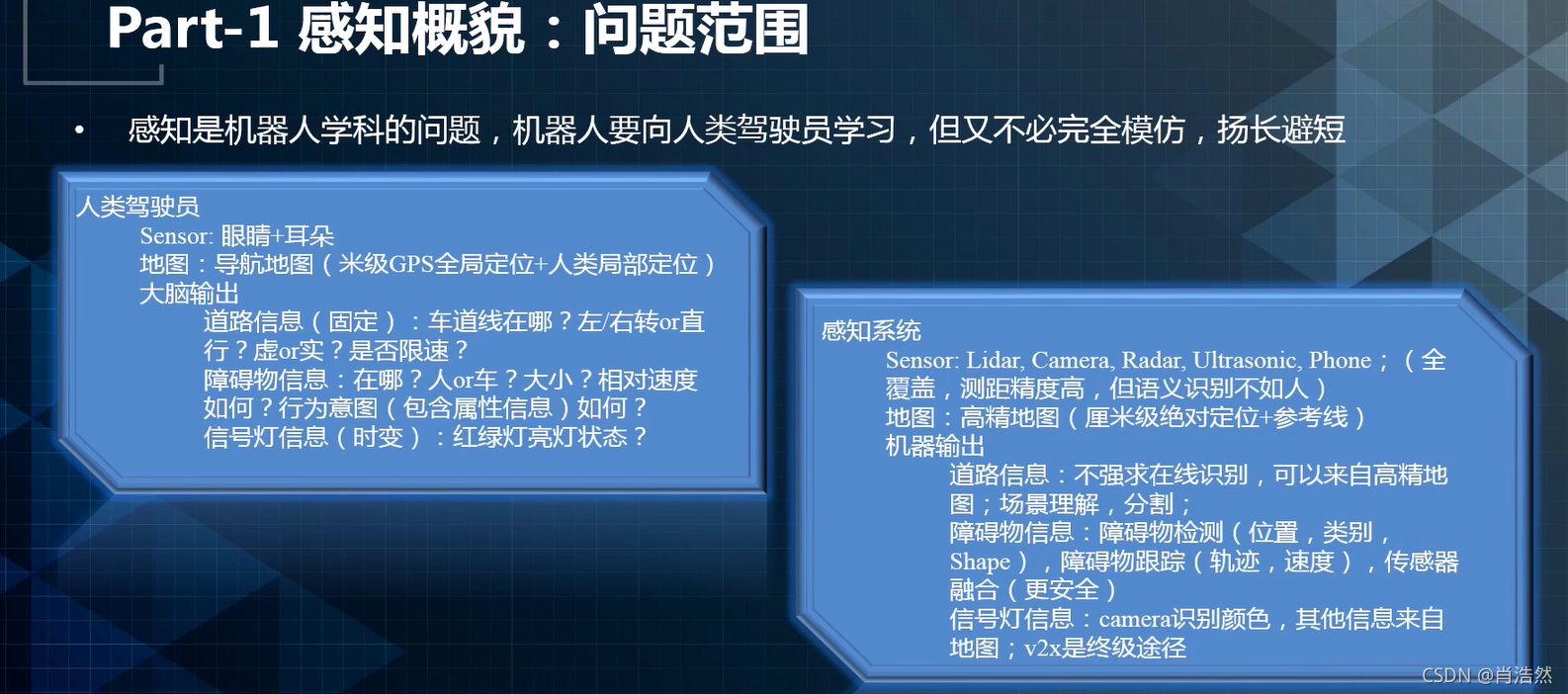
感知机器人学科的问题。
传感器:Lidar camera 毫米波雷达 超声波雷达 拾音器
无人车十分依赖高精度地图,没涉及到的地方就没法开。

传感器是什么?
传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
人与机器的对比:
机器相对于人的优势:机器对外界的感知是全覆盖高精度的
人相对于机器的优势:人对于语义的理解与感知强于机器
硬件的作用:硬件的更换可能会带来颠覆性的效果
传感器的选择和标定-1
选择
激光雷达
优点:全天候
缺点:很难做识别(比如Apollo是64线的,如果离得太远,可能只有一两根扫到了物体)
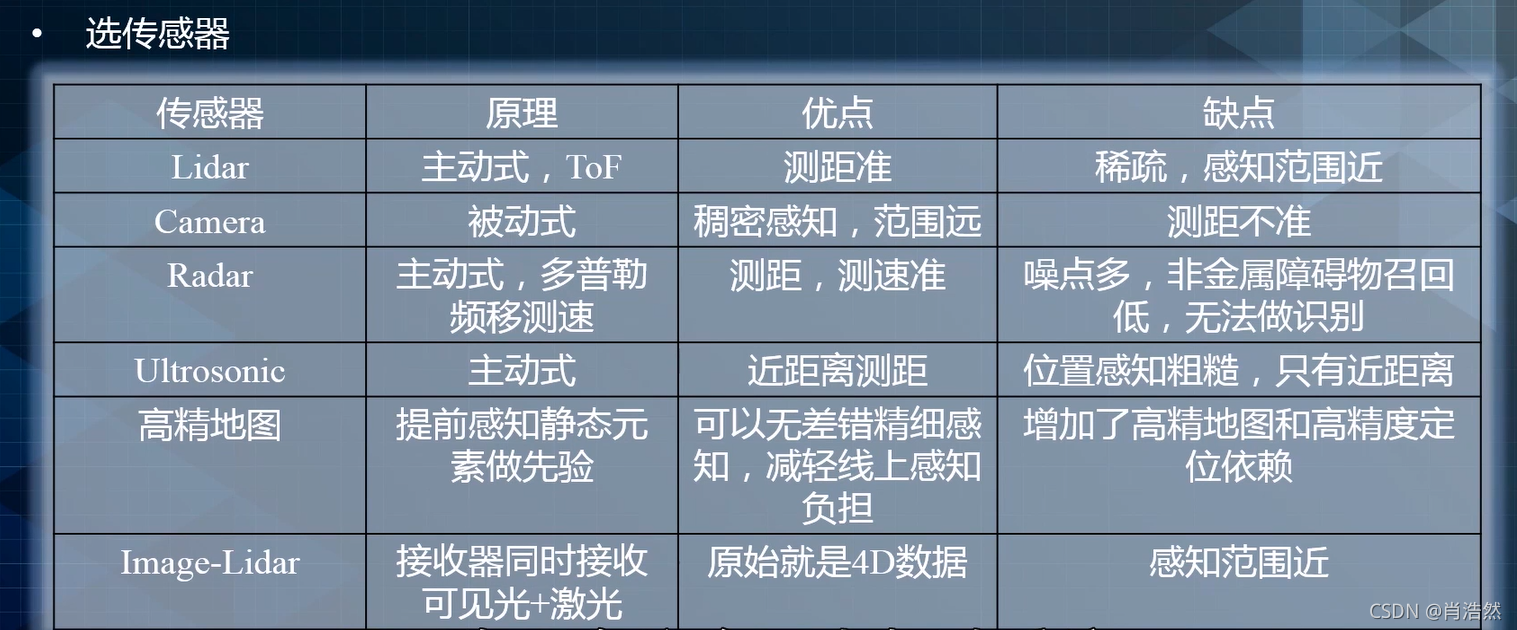
Image-Lidar:研发中,结合了激光和相机
安装
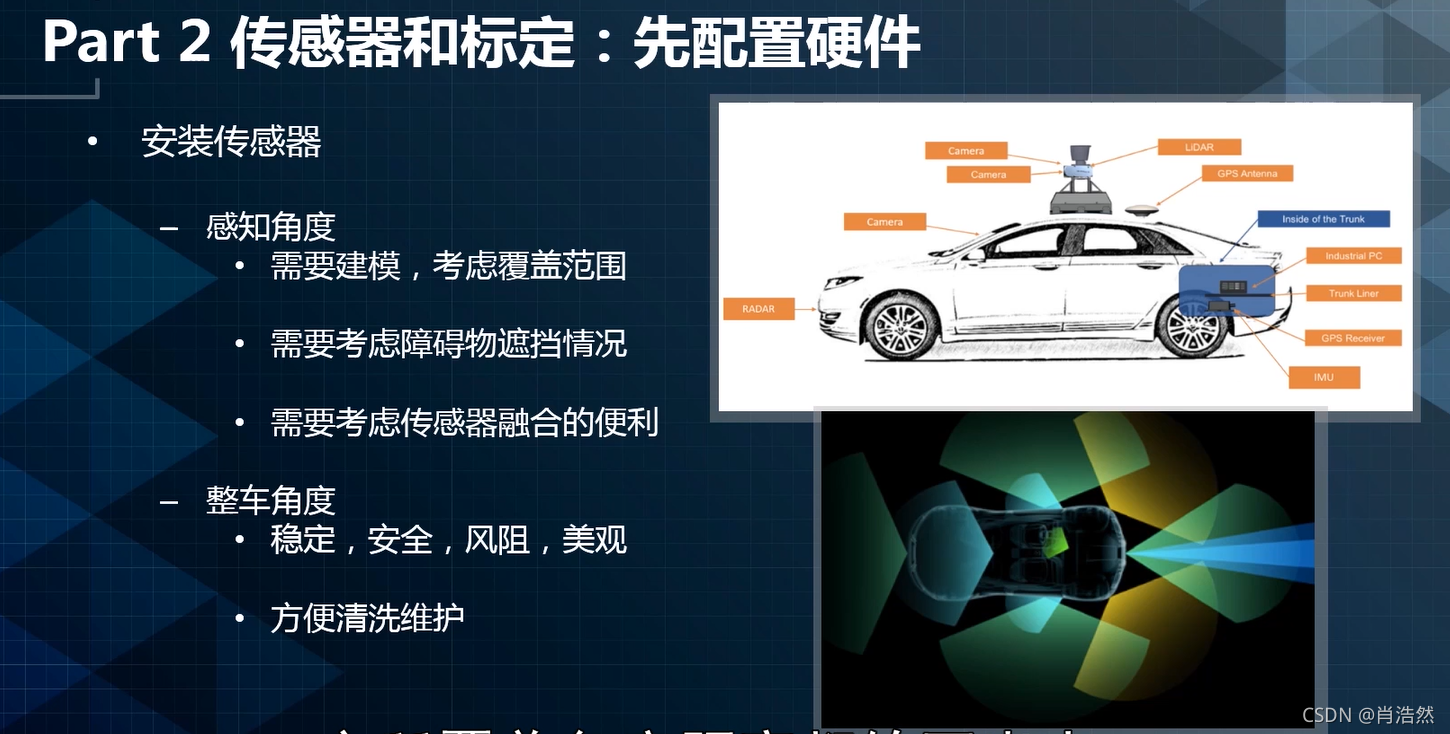
遮挡问题:放车顶
右下角:我们需要将传感器的覆盖距离、角度画出来(范围)
标定
任何一个传感器都有自己的第一个坐标系,我们需要将坐标系对齐
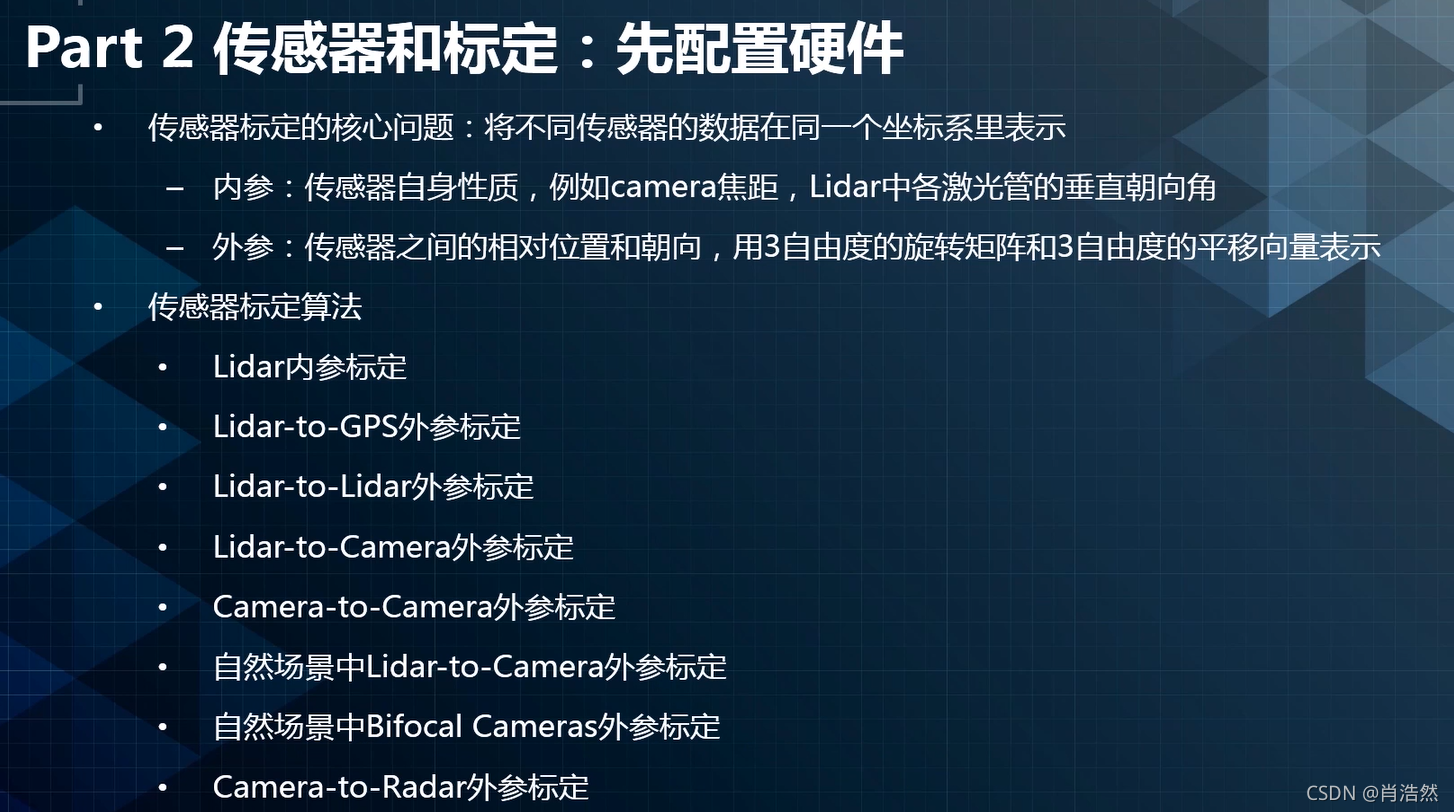
内参:传感器自身的参数,比如相机的焦距
外参:6个自由度(6个未知数)
外参标定核心思想:
- 两个传感器都能观测到同一个物体(或者同一条线、同一个点);
- 设置很多条件,解优化问题,将参数算出来;
- 利用好传递关系(比如A B很难标定,但可以标定AC BC,传递一下,AB就出来了)
标定间
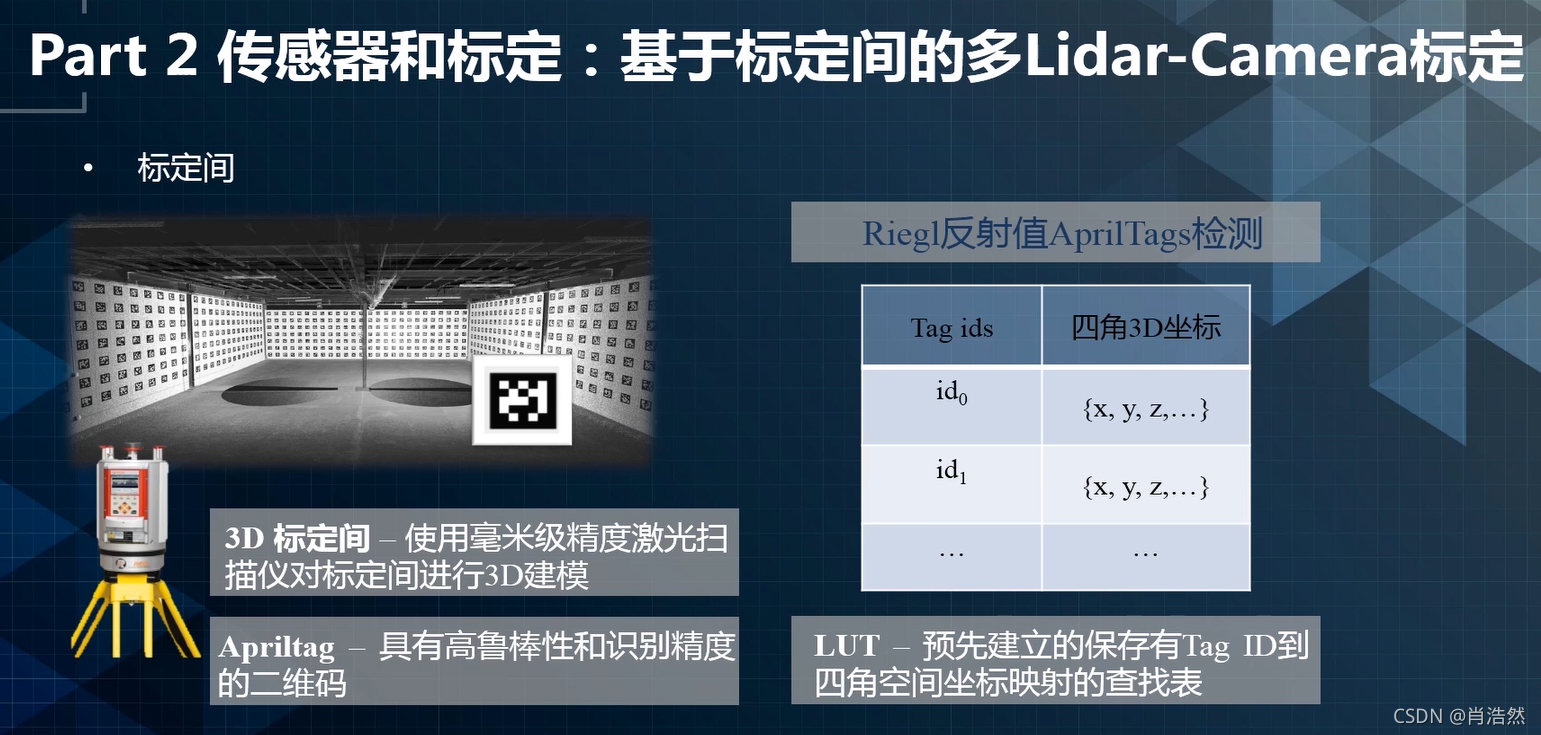
墙上贴了很多二维码,每个二维码代表一个位置
激光扫描仪扫出了所有二维码的3D坐标。
两个camera进行标定:
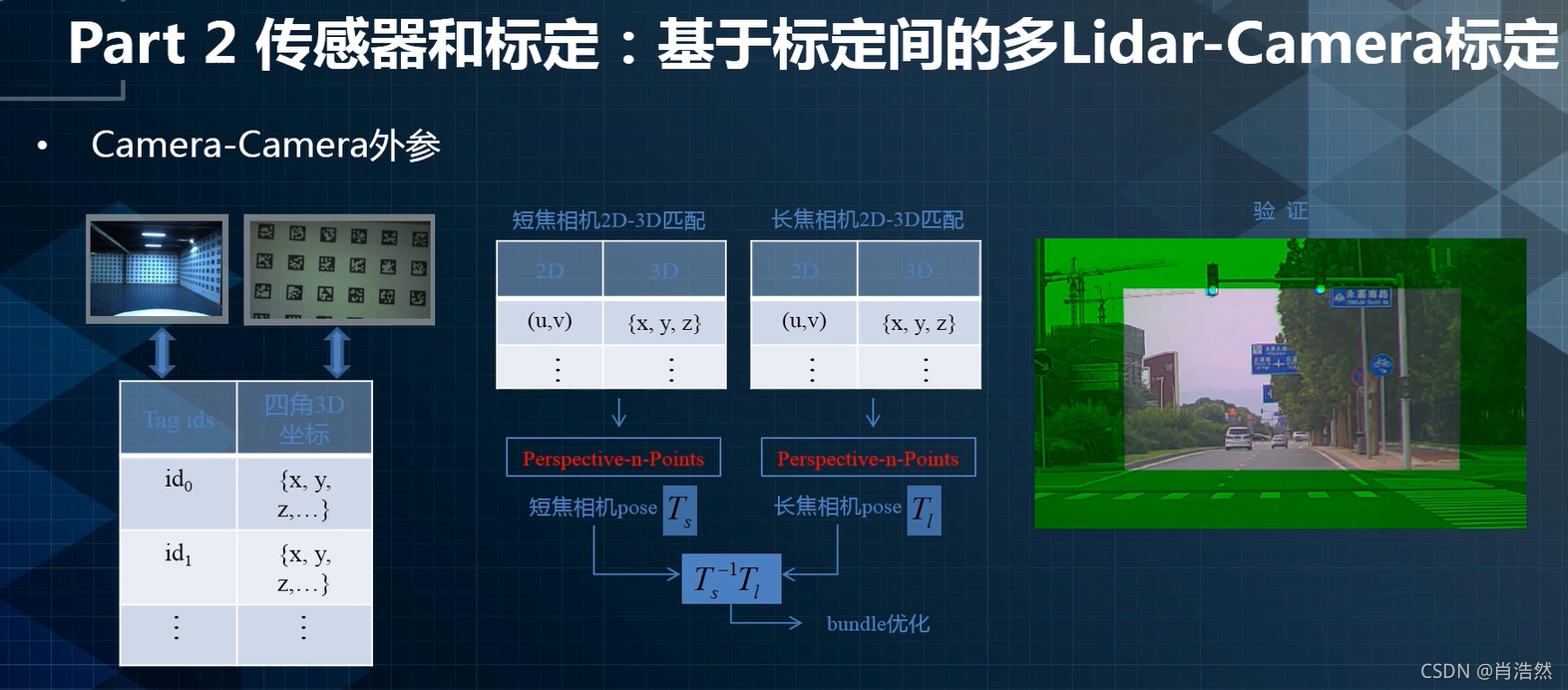
如何检验标定结果:
比如将长焦相机的图像通过标定好的参数投影到短焦相机的图像里,人看起来感觉没问题,那么标定的就比较准了。
标定Lidar和Camare
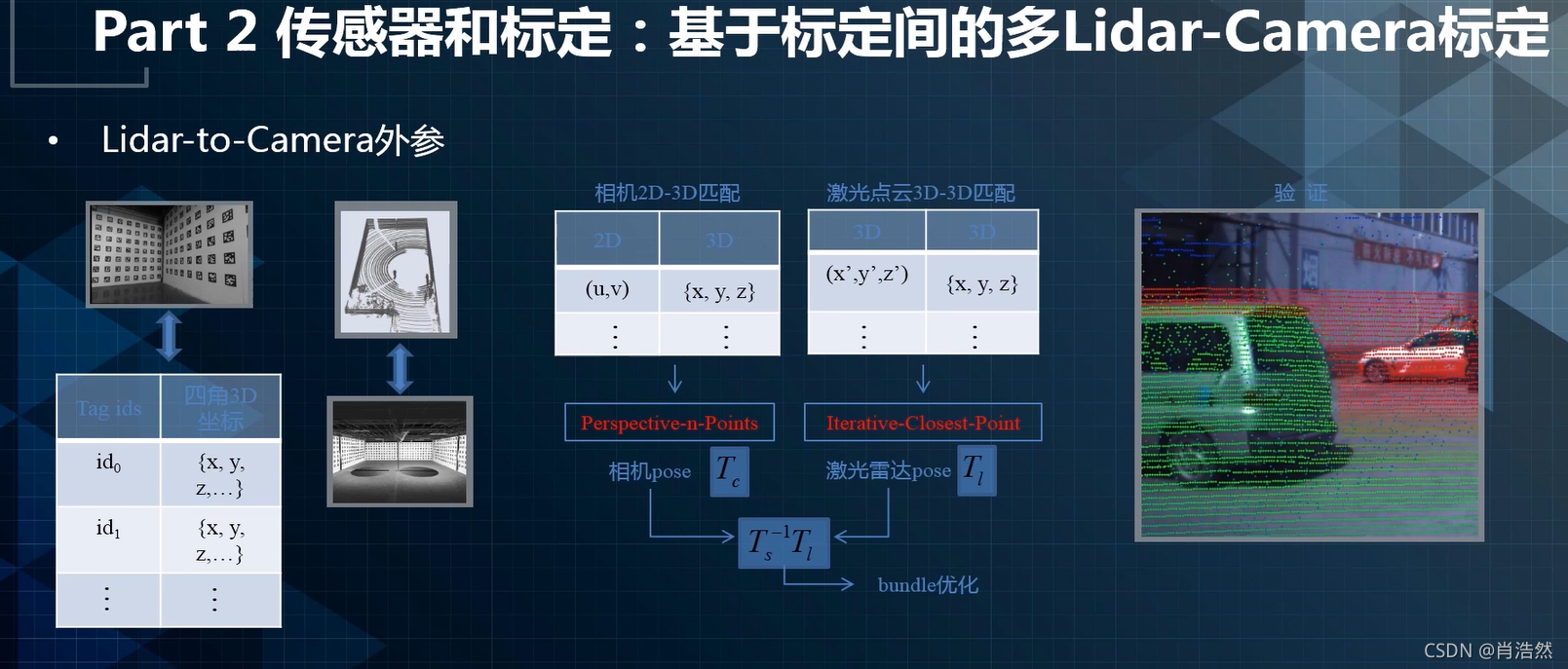
将3D点投影到图像上,看边界是否一致
Lidar 与 Lidar
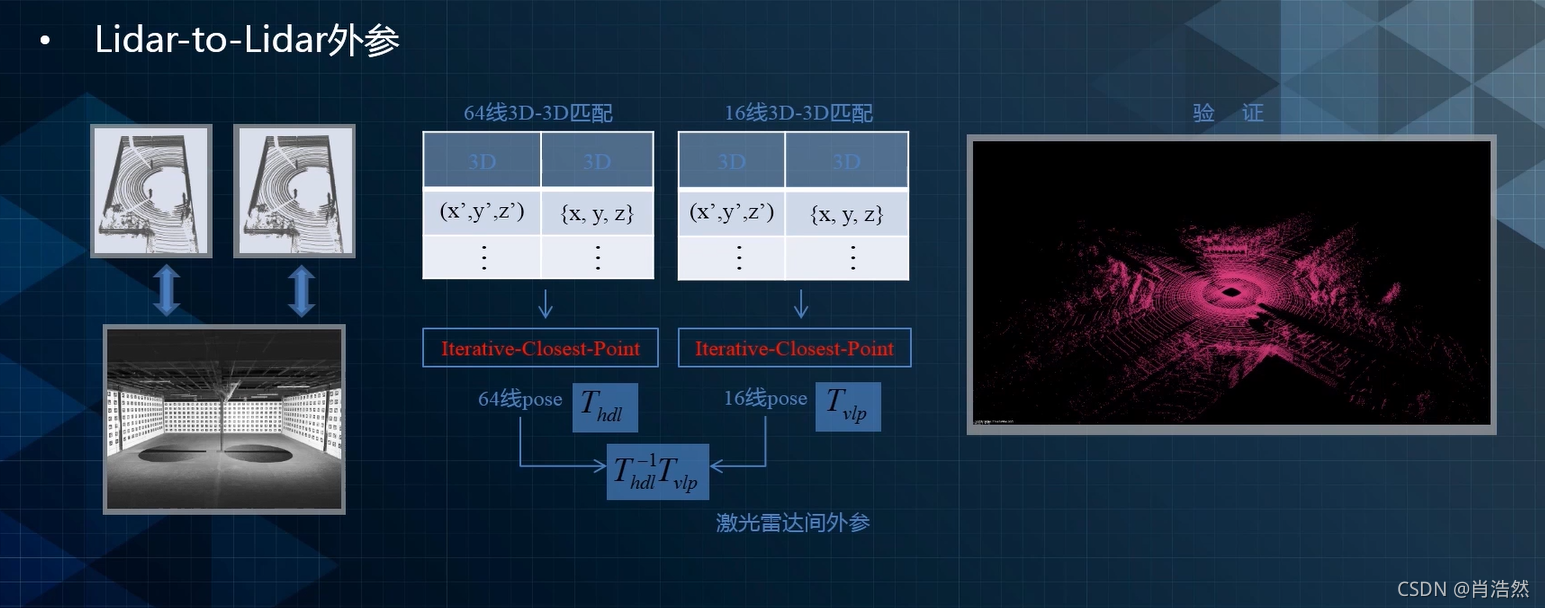
将所有点云都投影到真实世界,看是否比较清晰。
Camare与Radar
Radar:不知道高度,返回的是平面距离信息
假设Radar是水平的,那么两者的标定就是相机的倾斜角
我们可以借助Lidar,Lidar可以检查到地面,而Lidar和Camare已经标定好了,那么Camare就可以标定出自己和地面的倾斜角,也就得到了和Radar的标定参数。















 712
712











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









