







STM32笔记---CAN采样点设置和报错
采样点设置
以前配置CAN参数的BS1和BS2参数时认为总线波特率符合要求就可以了,其实同一个波特率可能对应多组参数设置的情况,这时就要从采样点的角度来考虑了。
采样点计算:
(
1
+
B
S
1
)
/
(
1
+
B
S
1
+
B
S
2
)
(1+BS1) / (1 + BS1 + BS2)
(1+BS1)/(1+BS1+BS2)
CiA推荐的采样点设置:当波特率 > 800K采样点75%,当波特率 > 500K采样点80%, 当波特率 <= 500K采样点87.5% 。
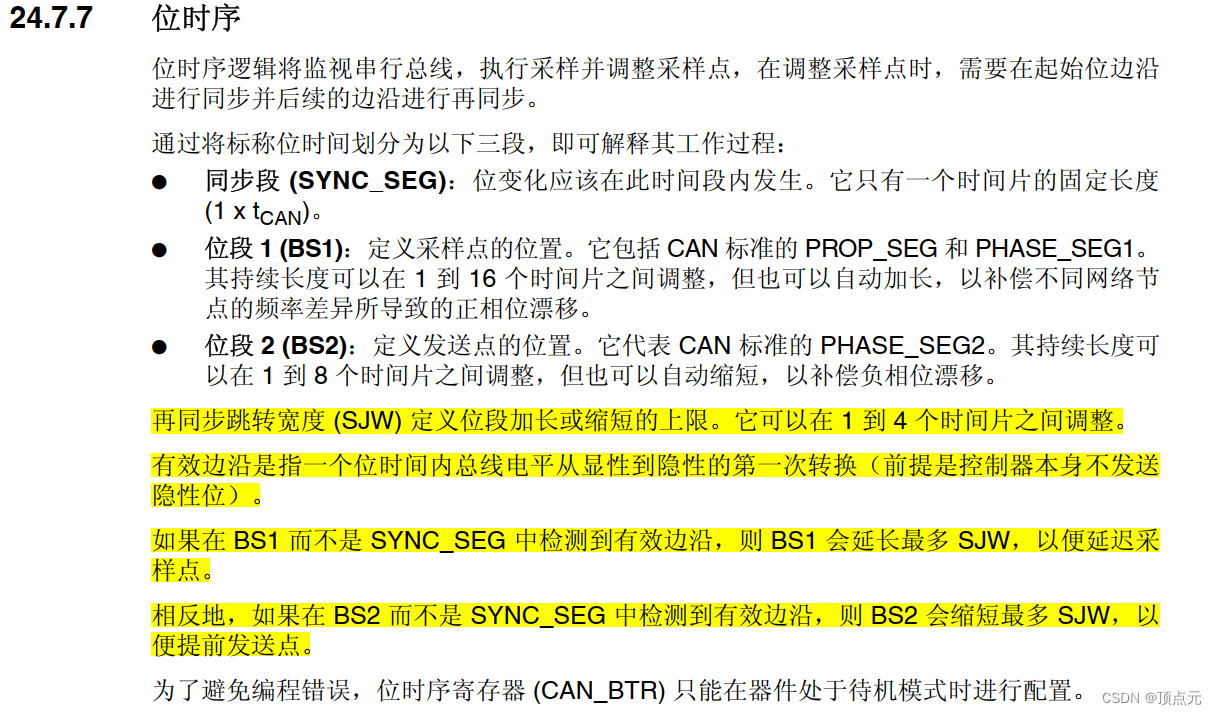
再同步补偿宽度(SJW)设置
再同步补偿宽度(SJW)的设置范围位1-4TQ,相当于CAN总线的采样点可以根据实际情况在1-4个TQ范围内进行调整,这个值大可以增大CAN波特率的容错范围。
可以参考参考手册中位时序部分的描述。

参考连接:https://zhuanlan.zhihu.com/p/38299092
参考文章:
http://www.zlgcan.com/cancaiyang/68/
报错分析
之前使用CAN总线一直没详细搞清楚,使能的错误中断都具体对应的是什么,使用的时候一下把所有的CAN错误中断都使能上,正好今天遇到的CAN总线的一些问题,详细看了下。
使能所有的CAN错误中断:
/* 使能CAN错误中断 */
HAL_CAN_ActivateNotification(&hcan, CAN_IT_ERROR | CAN_IT_BUSOFF | CAN_IT_ERROR_PASSIVE | CAN_IT_ERROR_WARNING | CAN_IT_LAST_ERROR_CODE);
CAN中断使能寄存器
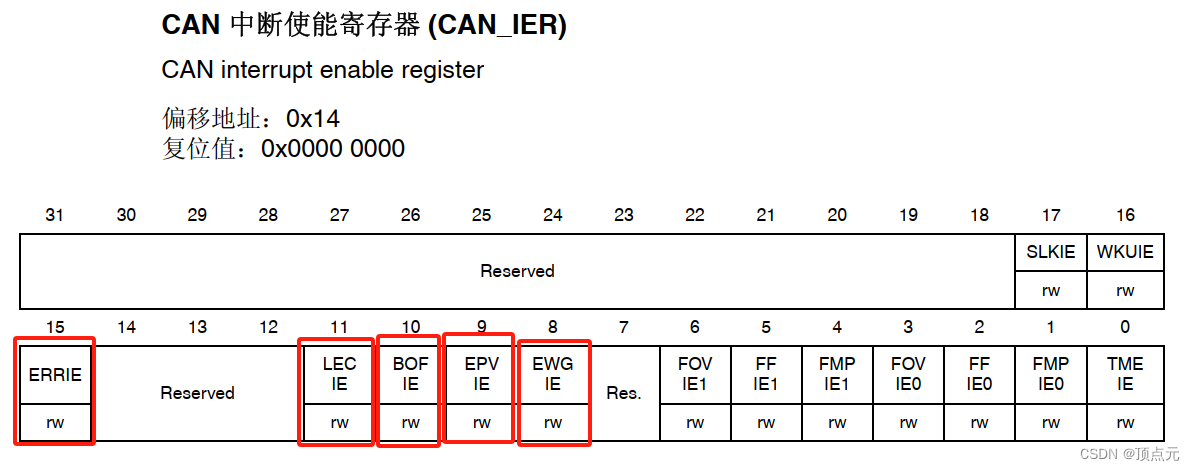
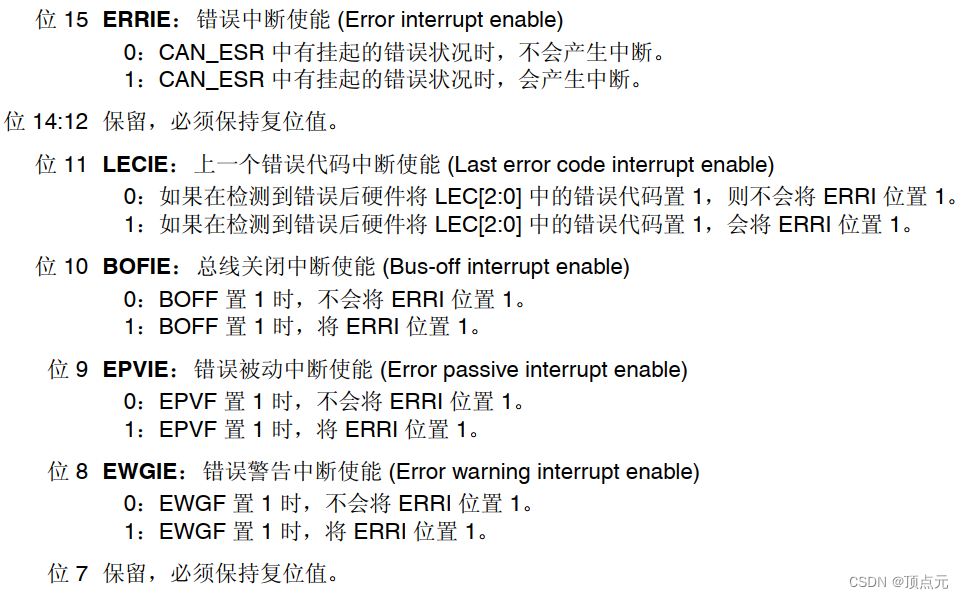
这里我们要搞清楚ERRIE和后面LCEIE,BOFIE,EPVIE,EWGIE几个中断使能的关系:ERRIE相当于错误使能的总开关,其它的错误中断使能相当于分开关,这里我们可以在HAL库的CAN中断处理的部分找到依据,ERRIE中断使能后出错时会将主状态寄存器(MSR)中的ERRI位置位,然后再依次判断有哪些分开关管理的错误中断触发了。
/* Error interrupts management *********************************************/
if ((interrupts & CAN_IT_ERROR) != 0U)
{
if ((msrflags & CAN_MSR_ERRI) != 0U)
{
/* Check Error Warning Flag */
if (((interrupts & CAN_IT_ERROR_WARNING) != 0U) &&
((esrflags & CAN_ESR_EWGF) != 0U))
{
/* Set CAN error code to Error Warning */
errorcode |= HAL_CAN_ERROR_EWG;
/* No need for clear of Error Warning Flag as read-only */
}
/* Check Error Passive Flag */
if (((interrupts & CAN_IT_ERROR_PASSIVE) != 0U) &&
((esrflags & CAN_ESR_EPVF) != 0U))
{
/* Set CAN error code to Error Passive */
errorcode |= HAL_CAN_ERROR_EPV;
/* No need for clear of Error Passive Flag as read-only */
}
/* Check Bus-off Flag */
if (((interrupts & CAN_IT_BUSOFF) != 0U) &&
((esrflags & CAN_ESR_BOFF) != 0U))
{
/* Set CAN error code to Bus-Off */
errorcode |= HAL_CAN_ERROR_BOF;
/* No need for clear of Error Bus-Off as read-only */
}
/* Check Last Error Code Flag */
if (((interrupts & CAN_IT_LAST_ERROR_CODE) != 0U) &&
((esrflags & CAN_ESR_LEC) != 0U))
{
switch (esrflags & CAN_ESR_LEC)
{
case (CAN_ESR_LEC_0):
/* Set CAN error code to Stuff error */
errorcode |= HAL_CAN_ERROR_STF;
break;
case (CAN_ESR_LEC_1):
/* Set CAN error code to Form error */
errorcode |= HAL_CAN_ERROR_FOR;
break;
case (CAN_ESR_LEC_1 | CAN_ESR_LEC_0):
/* Set CAN error code to Acknowledgement error */
errorcode |= HAL_CAN_ERROR_ACK;
break;
case (CAN_ESR_LEC_2):
/* Set CAN error code to Bit recessive error */
errorcode |= HAL_CAN_ERROR_BR;
break;
case (CAN_ESR_LEC_2 | CAN_ESR_LEC_0):
/* Set CAN error code to Bit Dominant error */
errorcode |= HAL_CAN_ERROR_BD;
break;
case (CAN_ESR_LEC_2 | CAN_ESR_LEC_1):
/* Set CAN error code to CRC error */
errorcode |= HAL_CAN_ERROR_CRC;
break;
default:
break;
}
/* Clear Last error code Flag */
CLEAR_BIT(hcan->Instance->ESR, CAN_ESR_LEC);
}
}
/* Clear ERRI Flag */
__HAL_CAN_CLEAR_FLAG(hcan, CAN_FLAG_ERRI);
}
CAN错误状态寄存器
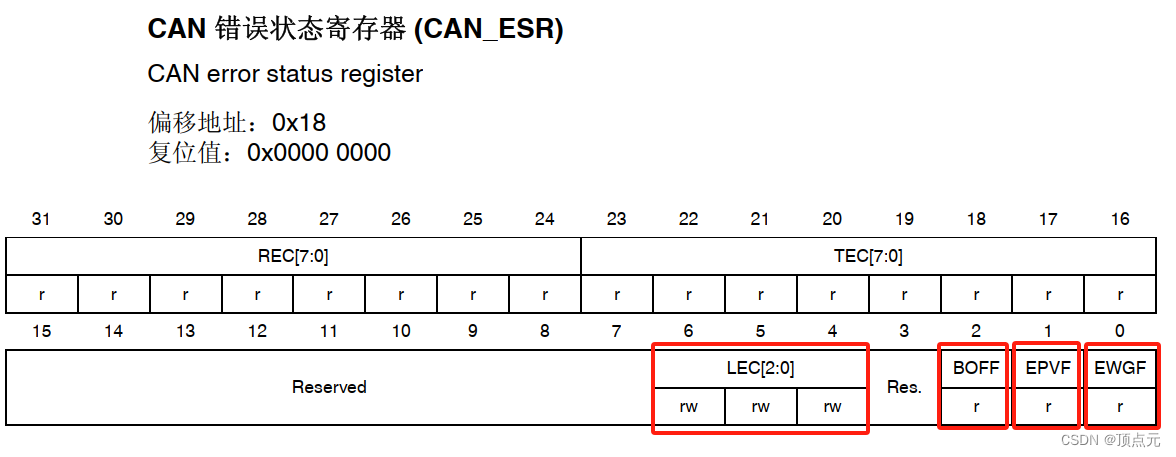
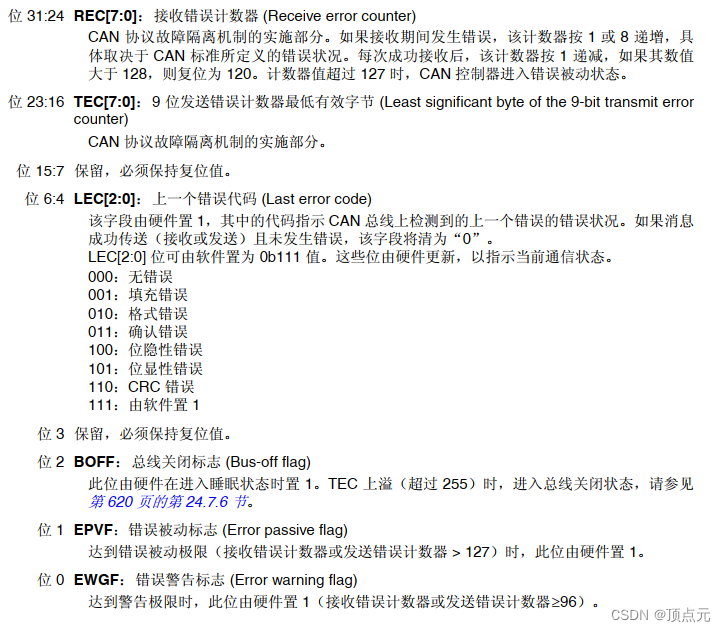
这个位置就是发生CAN错误时,实际要重点关注的位置,这个位置描述了具体是什么错误状态,然后寻找对应的解决办法。














 3404
3404











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









