








使用rosserial_arduino时,总会面对多传感器的处理,由于不同传感器的数据类型不同,为了方便起见,我们需要自定义数据文件。那么如何自定义的传感器数据,并在Arduino中使用呢?下面我就带大家自定义一个传感器数据,并在Arduino中使用。
上一节讲了rosserial_arduino包的基本概念,以及如何使用,这一节主要分享如何在Arduino中导入关于ROS的库文件ros_lib/Rosserial Arduino Library。
1 安装ros_lib
- 安装rosserial_arduino
方法一:
直接安装二进制文件,这种方法比较省事。打开一个新的终端,输入下面命令:
$ sudo apt_get install ros-<distro>-rosserial
$ sudo apt_get install ros-<distro>-rosserial-arduino
注意:<distro> 是自己安装的ROS版本,可能是 kinetic/indigo/melodic
方法二:
从源代码安装,需要新建一个工作空间,并编译rosserial包,详细步骤如下:
$ cd ~/<ws>/src
$ git clone https://github.com/ros-drivers/rosserial.git
$ cd ~/<ws>
$ catkin_make
$ catkin_make install
$ source ~/<ws>/devel/setup.bash # 设置环境变量
经过以上步骤,会生成通信所需的rosserial_msgs,并在 <ws>/devel/lib 目录中创建了库文件。编译的时候必须运行 catkin_make install,否则ros_lib库文件将会丢失一些内容。
- 安装ros_lib到Arduino环境中
前面创建了必要的库后,接下来将创建ros_lib库文件,Arduino需要此库文件,才能使Arduino程序与ROS交互。
$ cd <sketchbook>/libraries
$ rm -r ros_lib
$ rosrun rosserial_arduino make_libraries.py .
注意:
(1)对于/libraries,可以打开【文件】->【首选项】,找到Arduino的项目文件夹路径。如果已经存在ros_lib库文件,建议先删除ros_lib,否则后面运行会报错。
(2)如果要在Windows上安装ros_lib库,可以先在Linux上找一个工作目录,然后把生成的ros_lib库文件复制到Arduino的libraries。
(3)也可以在直接在Arduino IDE中安装ros_lib库,只需从IDE菜单中的【项目】->【加载库】->【管理库】中打开【库管理器】,然后搜索 rosserial。
- 重启Arduino IDE
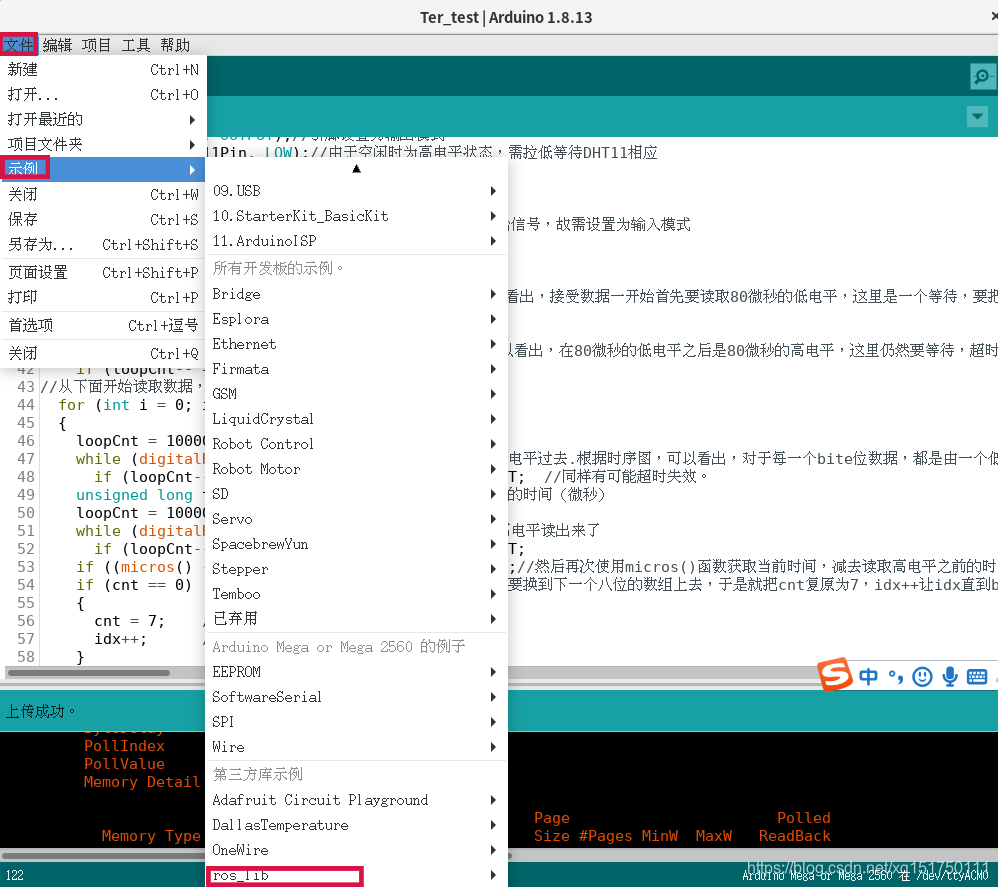
重启IDE后,打开【文件】->【示例】,便可以找到ros_lib/Rosserial Arduino Library。
- 使用
编写一个发布者和订阅者,原理图如下。

(1)发布者:一个按钮连接到Arduino开发板上,按钮被按下时通过ROS将数字高/低信号发送到PC,在PC的终端中可以看到该消息。
(2)订阅者:一个LED连接到Arduino板上,通过在终端发布消息,通过终端从ROS用户那里获得的指令来打开/关闭LED。
代码如下:
#include <ros.h> // 导入ros_lib库
#include <std_msgs/String.h> // 标准的ROS消息
#include <std_msgs/UINT16.h>
#define BUTTON 8 // 引脚声明
#define LED 13
ros::NodeHandle nh; // 实例化句柄,初始化Node
std_msgs::String button_msg;
std_msgs::UInt16 led_msg;
void subscriberCallback(const std_msgs::UInt16& led_msg){
if(led_msg.data == 1){
dgitalWrite(LED, HIGH);
}else{
digitalWrite(LED, LOW);
}
}
// 声明一个button_publisher的发布者,该发布者将std_msgs :: String数据类型的button_msg发布到button_press主题
ros::Publisher button_publisher("button_press", &button_msg);
// 声明一个led_subscriber的订阅者,订阅了toggle_led主题,该主题获取std_msgs :: UInt6数据类型。
ros::Subscriber<std_msgs::UInt16> led_subscriber("toggle_led", &subscriberCallback);
void setup(){
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
nh.initNode(); // 节点初始化
nh.advertise(button_publisher);
nh.subscribe(led_subscriber);
}
void loop(){
if(digitalRead(BUTTON) == HIGH){
button_msg.data = "Pressed";
}else{
button_msg.data = " NOT Pressed";
}
button_publisher.publish(&button_msg);
nh.spinOnce();
delay(100);
}
编译并烧录到Arduino中,Arduino可能是通过接口/dev/ttyACM# 或者 /dev/ttyUSB#来连接Linux系统的。这里的#可以是0,1,2等数字,当然这根据你连接的设备数量而定。得到这个数字#最简单的方式就是拔掉所有的USB设备,然后插上你的Arduino,然后运行下面这个命令
$ ls /dev/tty<ACM* or USB*>
查看接口的访问权限:
$ ls -l /dev/ttyACM0
crw-rw---- 1 root dialout 166, 0 5月 12 14:05 /dev/ttyACM0
上面的结果说明,只有 root 和 dialout 组才有读写权限,所以需要让当前用户成为dialout组的一个成员。你仅仅需要马上加入这组中,并且它会对你之后插入的所有的USB设备都起作用。运行这个命令来加入dialout组:
$ sudo usermod -a -G dialout <user_name>
然后在终端执行以下命令:
# 终端1——运行节点管理器
$ roscore
# 终端2——运行rosserial客户端
$ rosrun rosserial_python serial_node.py /dev/ttyACM0
# 终端3——读取是否按下按钮并返回的已发布数据
$ rostopic echo button_press
# 终端4——发布数据以切换Arduino上连接的LED
$ rostopic pub toggle_led std_msgs/UInt16 "data:0"
最终结果如下:

- 问题补充
有的小伙伴在Arduino编译的时候,可能会遇到无法编译通过的问题(cstring、cstddef、rosserial),如下图所示:

解决办法:把 cstring.c 文件找到并添加到ros_lib文件夹即可,可以在 StandardCplusplus里面查找到 cstring.c 和 cstddef.c 复制到ros_lib文件夹即可。
2 自定义msg
- 新建一个catkin_ws工程,并在
~/catkin_ws/src新建一个功能包learning_test,在功能包里创建msg文件夹,用来自定义msg。如可以在里面定义一个传感器数据sensor.msg,然后回到工程目录下编译,编译完成后使用rospack profile刷新一下包。详细过程,可以参考:如何在ROS中自定义msg类型 - 如果没有安装rosserial_arduino,可以参照第一部分的安装教程;安装完之后,想要在Arduino中使用自定义的数据文件,需要重新生成一下ros_lib;先进入Arduino的项目文件夹路径,如下:
$ cd <sketchbook>/libraries
$ rm -r ros_lib
$ rosrun rosserial_arduino make_libraries.py .
- 经过以上步骤,就可以在ros_lib找到自己定义的msg生成的头文件,具体如下:

















 9662
9662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











