







ABSTRACT
OpenVSLAM,这是一个具有高可用性和可扩展性的视觉 SLAM 框架,然而,传统的开源视觉SLAM框架并没有适当地设计为第三方程序调用的库。为了克服这种情况,我们开发了一种新的视觉 SLAM 框架。该软件旨在轻松使用和扩展。它整合了几个有用的特征和功能进行研究和发展。
1 INTRODUCTION
在本文中,我们提出了 OpenVSLAM、单目、立体和 RGBD 视觉 SLAM 系统,该系统包含众所周知的 SLAM 方法,将它们封装在几个分离的组件中,并具有清晰的应用程序编程接口 (API)。我们还为其提供了广泛的文档,包括样本代码片段。OpenVSLAM的主要贡献是
•它与各种类型的相机模型兼容,可以定制可选的相机模型。
•创建地图可以存储和加载,然后OpenVSLAM可以使用预先构建的地图定位新图像。
•为了方便用户,提供了一个运行在web浏览器上的跨平台查看器。
2 RELATED WORK
LSD-SLAM[4]和DSO[3]是直接SLAM的两种不同方法,直接利用图像中每个像素的亮度信息实现视觉SLAM处理。需要注意的是,直接方法不必从图像中显式提取任何关键点。与间接方法不同,直接方法可以在更多的无纹理环境中正确操作,因为它利用了图像中的整个信息。然而,直接方法对光照条件的变化具有更强的敏感性。此外,据报道,当使用滚动快门相机时,直接方法的性能低于间接方法 [3, 4]。鉴于智能手机和消费相机中的图像传感器是滚动快门,OpenVSLAM采用了间接的视觉SLAM方法。
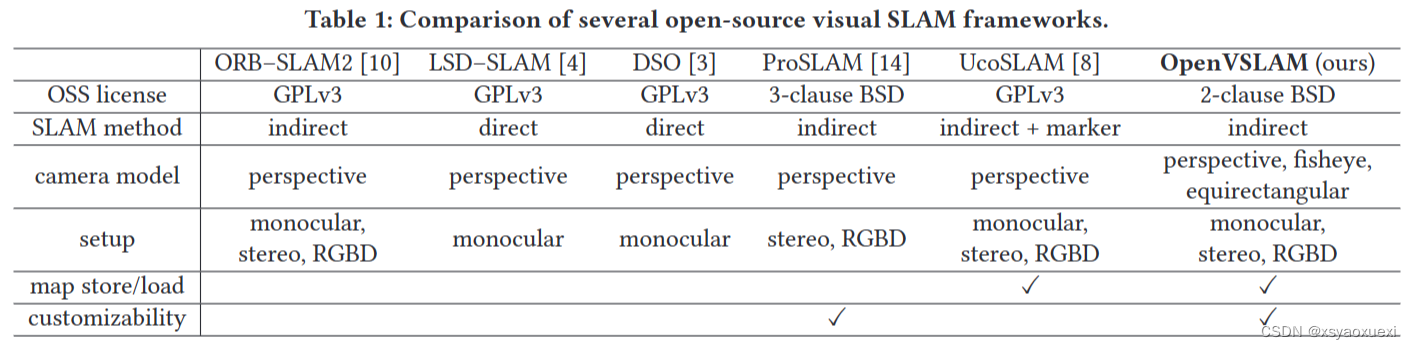
大多数视觉SLAM框架不能存储和加载地图数据库,如表1所示。基于预先构建的地图的定位对于许多应用程序来说具有重要的现实意义。因此,很明显存储和加载创建的地图的能力提高了视觉SLAM框架的可用性和可扩展性。因此,地图数据库 I/O 的功能在 OpenVSLAM 中实现。
3 IMPLEMENTATION
3.1 SLAM Algorithm
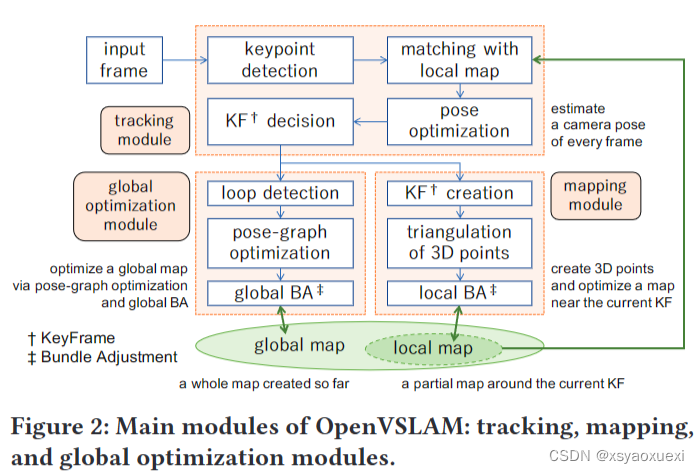
如图2所示:跟踪、映射和全局优化模块。跟踪模块通过关键点匹配和位姿优化估计每一帧的相机位姿,这些帧通过关键点匹配和位姿优化顺序输入到 OpenVSLAM。该模块还决定是否插入一个新的关键帧 (KF)。当帧被视为适合新的 KF 时,它被发送到映射和全局优化模块。在映射模块中,使用插入的 KF 对新 3D 点进行三角化;也就是说,地图是创建和扩展的。此外,该模块执行窗口图优化,称为局部束调整(BA)。在全局优化模块中进行环路检测、位姿图优化和全局BA。轨迹漂移,通常成为SLAM中的一个问题,通过g2o[6]实现的位姿图优化来解决。以这种方式也取消了尺度漂移,特别是对于单目相机模型。
3.2 Camera Models
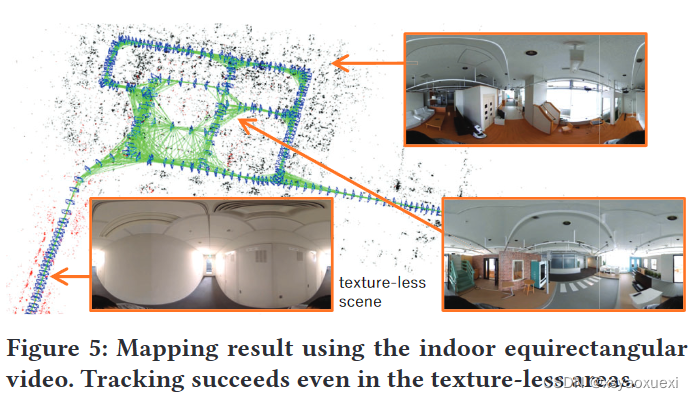
OpenVSLAM可以接受透视、鱼眼和等矩形相机捕获的图像。在透视和鱼眼相机模型方面,该框架不仅与单目兼容,而且与立体和RGBD设置兼容。此外,用户可以通过实现从基类相机导出的新的相机模型类,轻松地添加新相机模型(例如,双鱼眼和分解二极管):base。与其他 SLAM 框架相比,这是一个很大的优势,因为可以轻松实现新的相机模型。值得注意的是,OpenVSLAM可以使用等矩形相机执行SLAM。矩形相机,如RICOH THETA系列、Insta360系列和Ladybug系列,最近被用于捕捉全向图像和视频。关于视觉SLAM,与等矩形相机兼容意味着跟踪和映射的显著好处,因为它们具有全向视图,与透视相机不同。
据我们所知,这是第一个可以接受等矩形图像的开源视觉 SLAM 框架。
3.3 Map I/O and Localization
OpenVSLAM具有存储和加载地图信息的功能,如表1所示。此外,用户可以基于预先构建的地图定位新帧。地图数据库以 MessagePack 格式存储,因此除了 OpenVSLAM 之外,地图信息还可以用于任何第三方应用程序。
4 QUANTITATIVE EVALUATION
 OpenVSLAM比ORB-SLAM消耗更少的跟踪时间。这主要是因为OpenVSLAM中ORB提取的实现比ORB-SLAM中的ORB提取实现更优化。
OpenVSLAM比ORB-SLAM消耗更少的跟踪时间。这主要是因为OpenVSLAM中ORB提取的实现比ORB-SLAM中的ORB提取实现更优化。
6 CONCLUSION
在这个项目中,我们开发了 OpenVSLAM,这是一个具有高可用性和可扩展性的视觉 SLAM 框架。软件是旨在轻松用于视觉SLAM的各种应用场景。它包含几个有用的研究和发展功能。本文提出了一种具有透视和等矩形相机模型的视觉SLAM示例。此外,使用基准数据集评估定量性能。我们将不断维护这个框架,以进一步开发计算机视觉和机器人领域。














 2351
2351











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









