参考:
https://colmap.github.io/index.html
https://www.bilibili.com/video/BV1x64y1x7Kw/
Colmap稀疏重建Sparse Reconstruction
图片及项目准备
准备图片
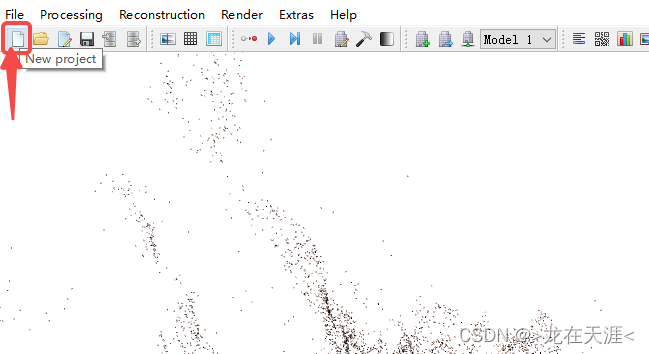
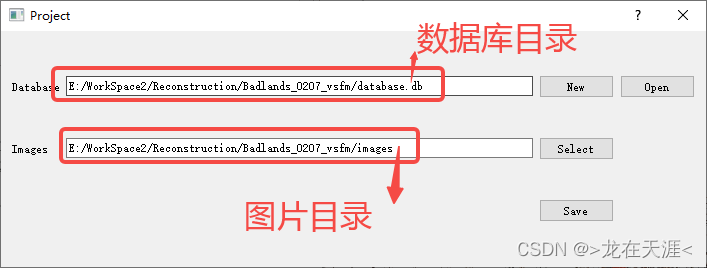
colmap创建工程
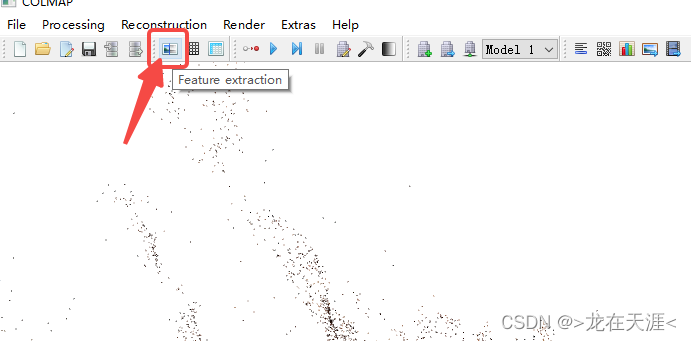
Feature extraction
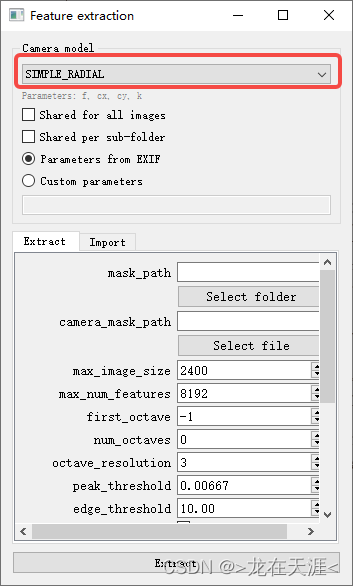
Colmap gui程序:
Camera model只有选择SIMPLE_RADIAL, RADIAL, 和pinhole camera等模式才能使用照片来制作模型的映射贴图.
命令行:
| Plaintext
colmap feature_extractor \
--database_path $DATASET_PATH/database.db \
--image_path $DATASET_PATH/images |
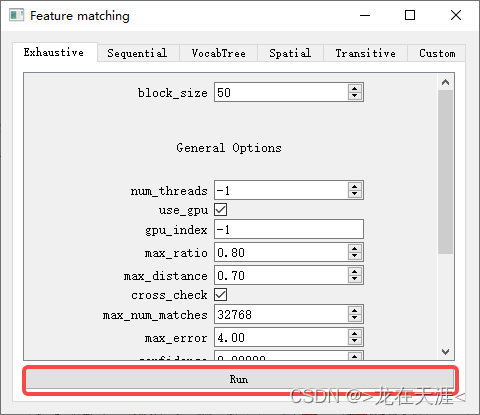
Feature matching
Colmap gui程序:
命令行:
| Plaintext
colmap exhaustive_matcher \
--database_path $DATASET_PATH/database.db |
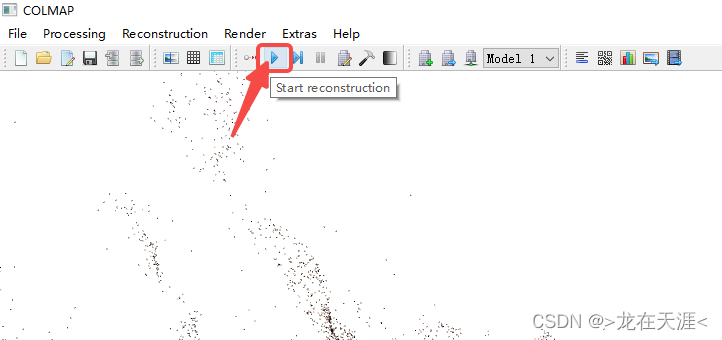
Reconstruction
Colmap gui程序:
命令行:
| Plaintext
colmap mapper \
--database_path $DATASET_PATH/database.db \
--image_path $DATASET_PATH/images \
--output_path $DATASET_PATH/sparse |
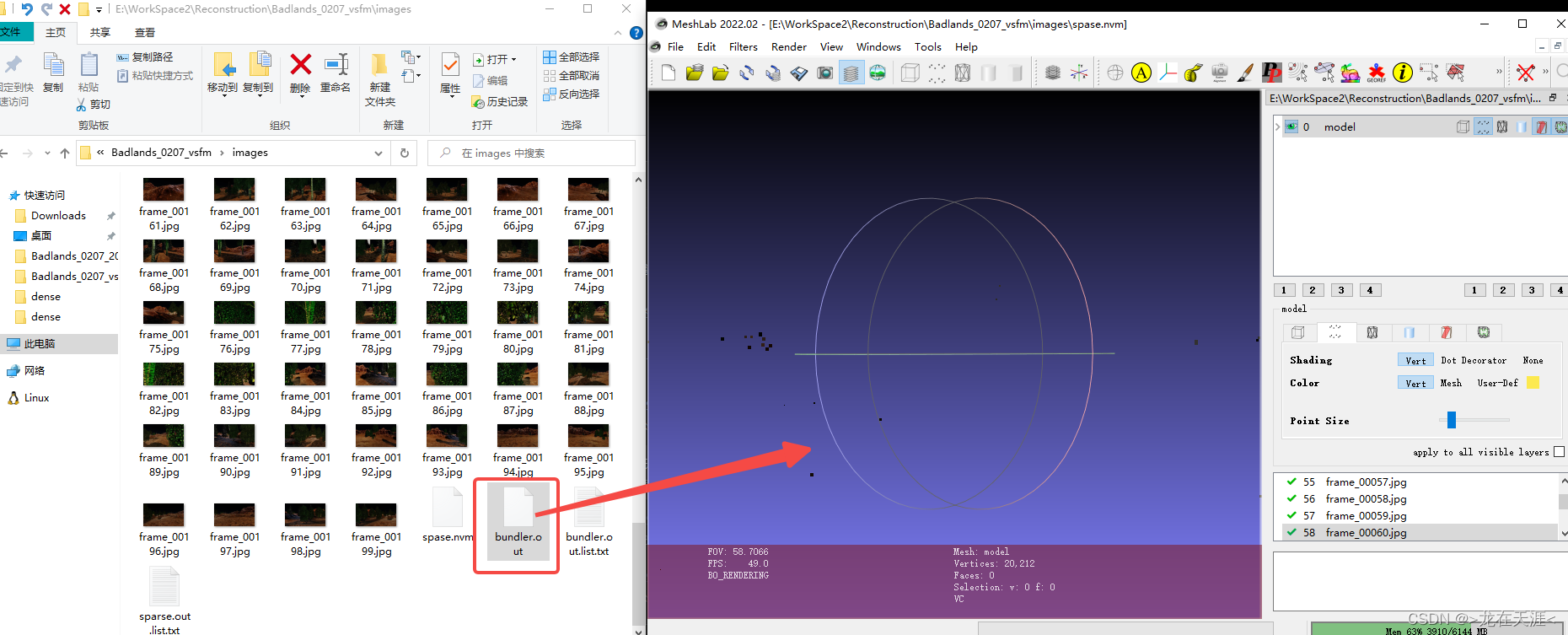
导出模型
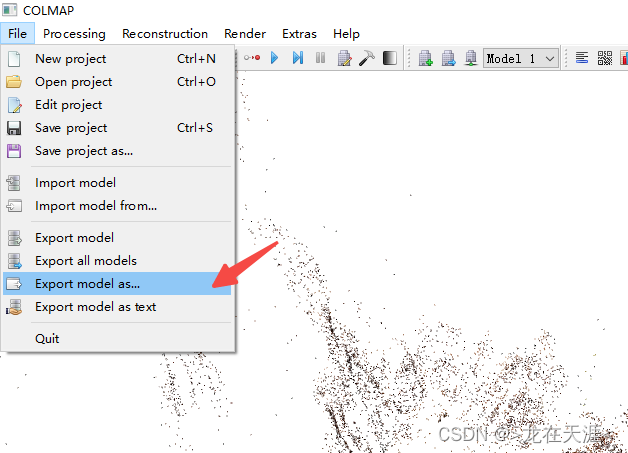
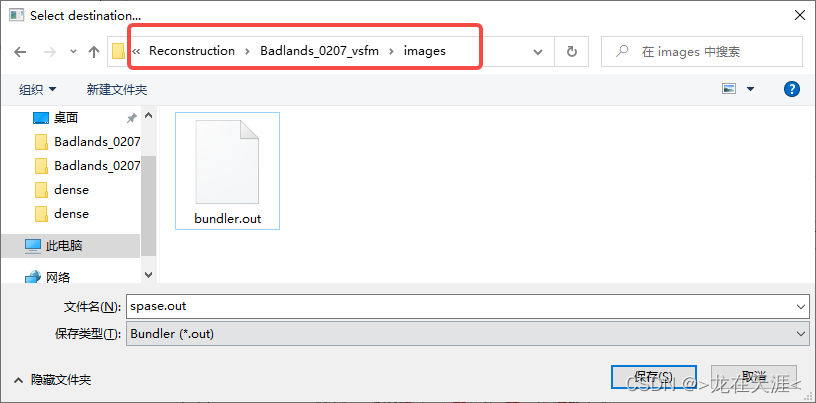
需导出nvm或out格式模型,模型需导出到图片所在目录,后面将模型导入Meshlab中使用时才能正确使用图片数据.
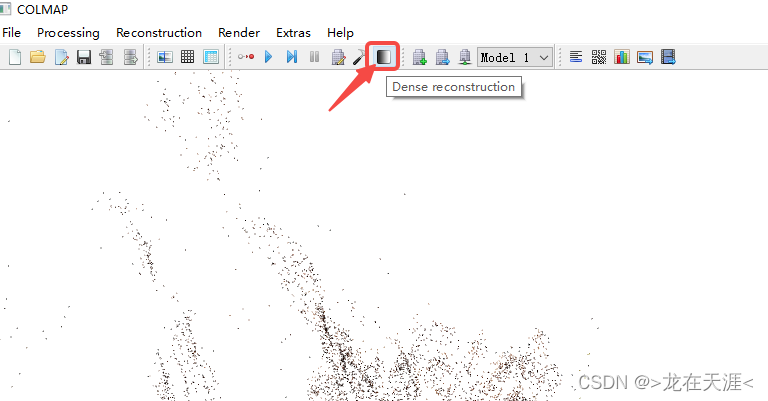
Colmap稠密重建DenseReconstruction
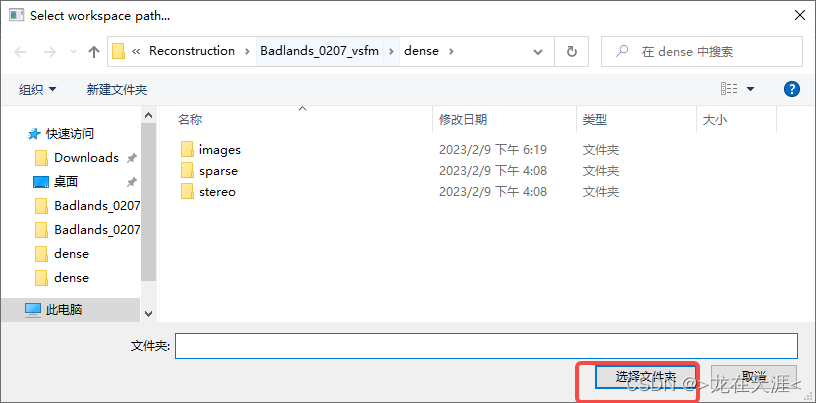
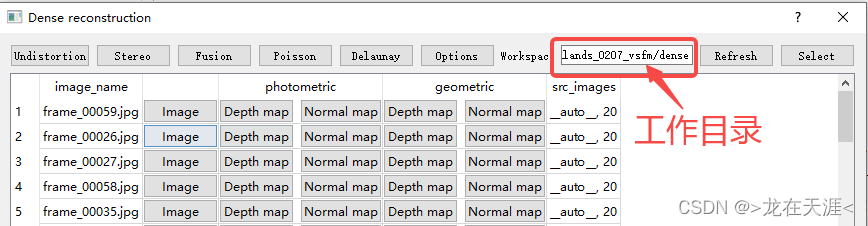
准备
Colmap gui程序:
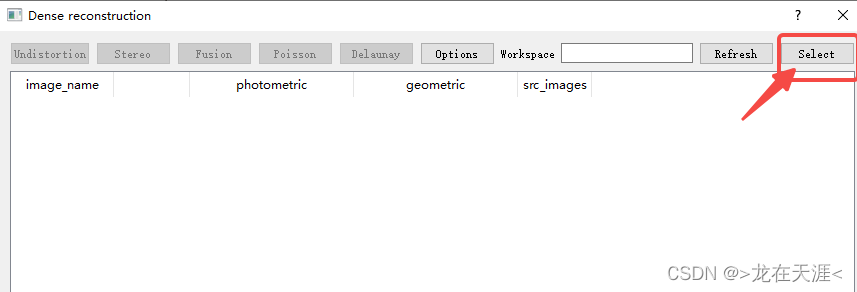
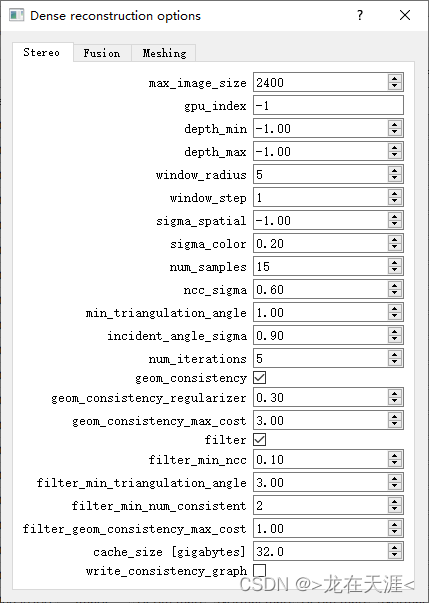
参数设置:
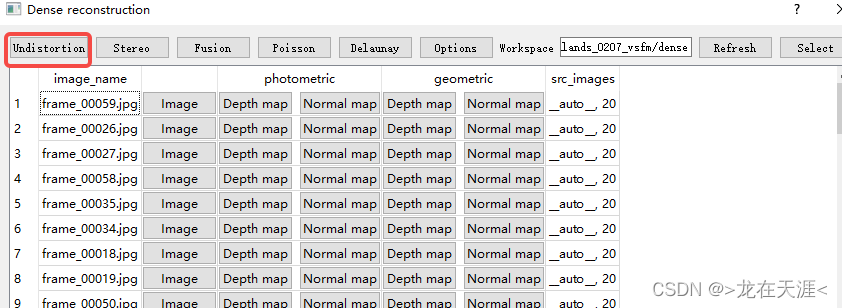
Undistortion去畸变
Colmap gui程序:
命令行:
| Plaintext
mkdir $DATASET_PATH/dense
colmap image_undistorter \
--image_path $DATASET_PATH/images \
--input_path $DATASET_PATH/sparse/0 \
--output_path $DATASET_PATH/dense \
--output_type COLMAP \
--max_image_size 2000 |
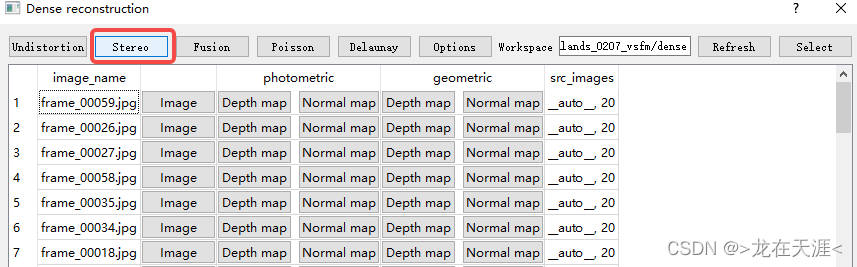
Stereo
Colmap gui程序:
命令行:
| Plaintext
colmap patch_match_stereo \
--workspace_path $DATASET_PATH/dense \
--workspace_format COLMAP \
--PatchMatchStereo.geom_consistency true |
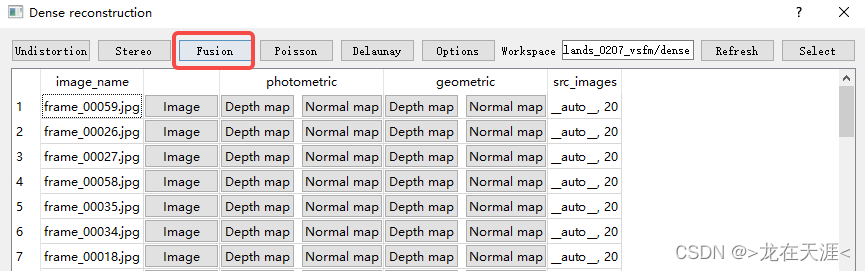
Fusion
Colmap gui程序:
命令行:
| Plaintext
colmap stereo_fusion \
--workspace_path $DATASET_PATH/dense \
--workspace_format COLMAP \
--input_type geometric \
--output_path $DATASET_PATH/dense/fused.ply |
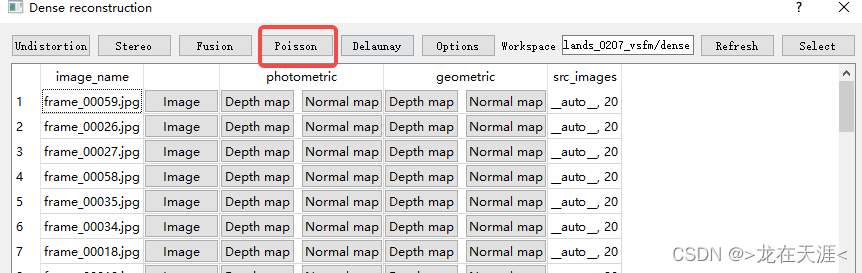
Poisson Mesh
Colmap gui程序:
命令行:
| Plaintext
colmap poisson_mesher \
--input_path $DATASET_PATH/dense/fused.ply \
--output_path $DATASET_PATH/dense/meshed-poisson.ply |
MeshLab网格处理及贴图
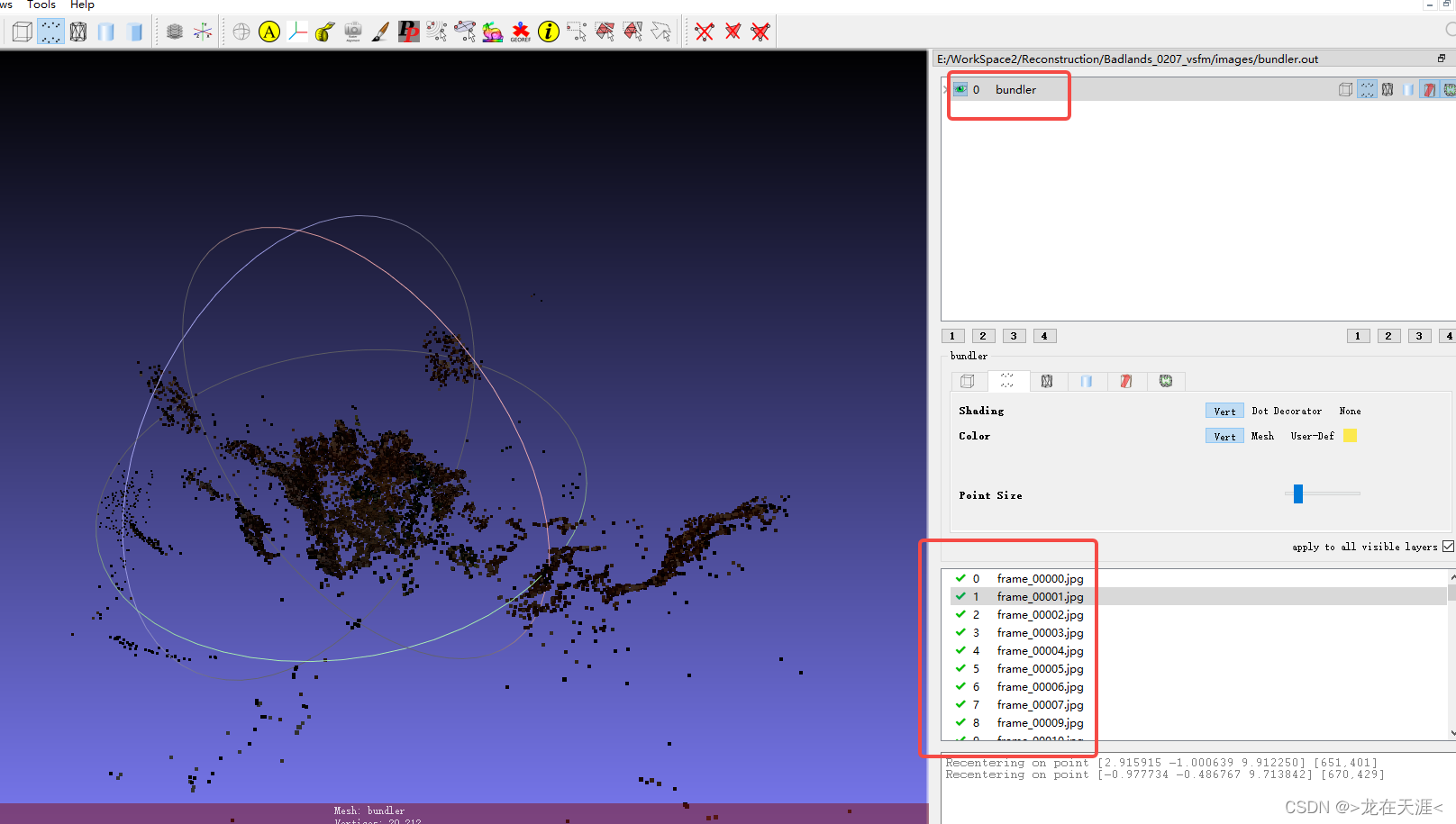
导入稀疏重建的模型
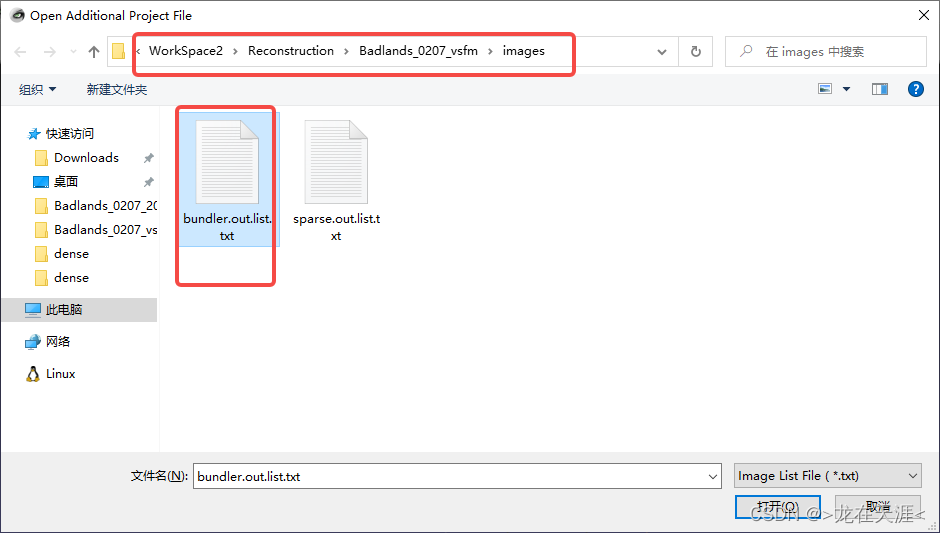
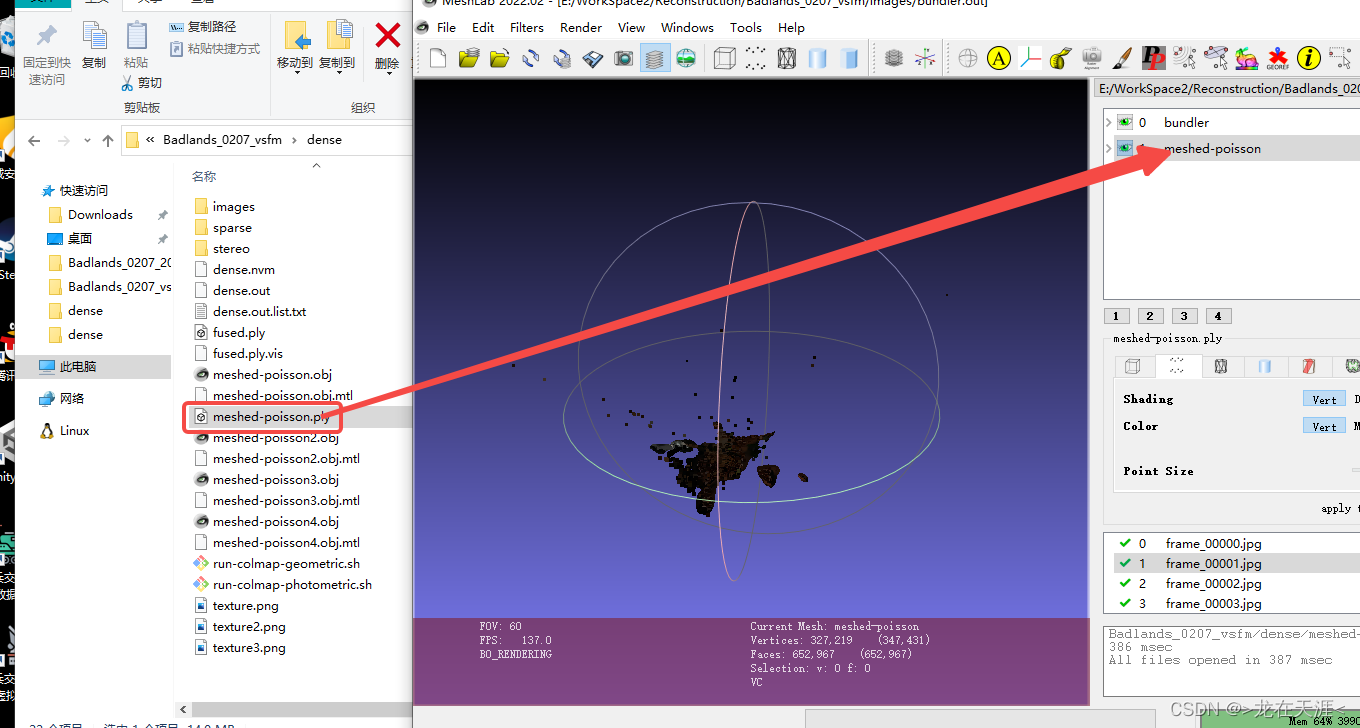
导入稠密重建的网格模型:
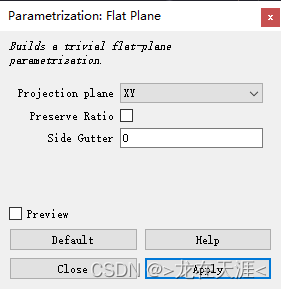
创建UV
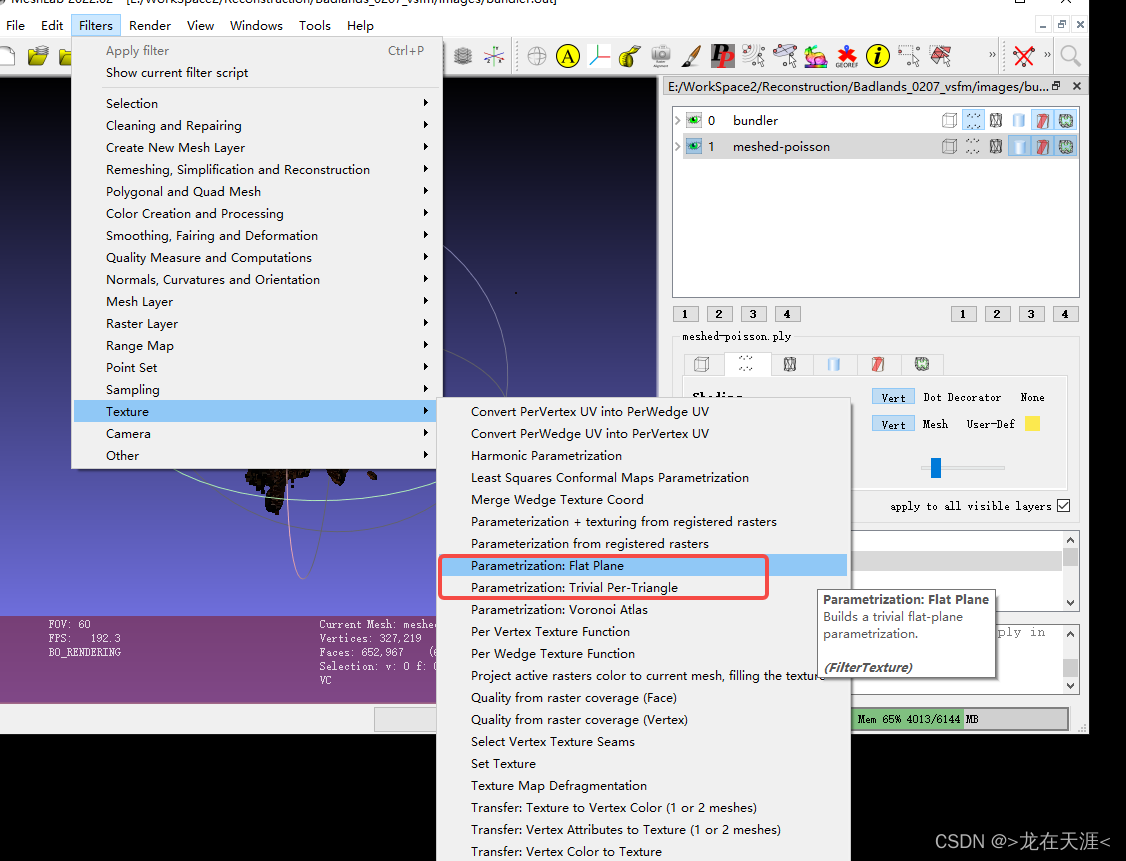
FlatPlane方式
Trivial Per-Triangle方式
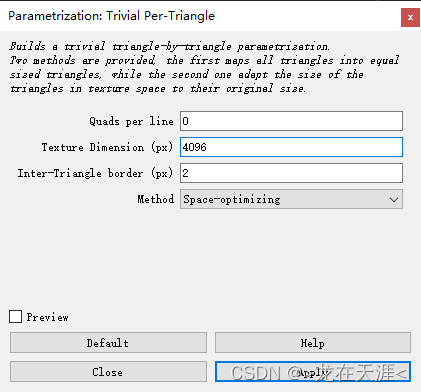
使用Trivial Per-Triangle方式在顶点数过多时会失败.
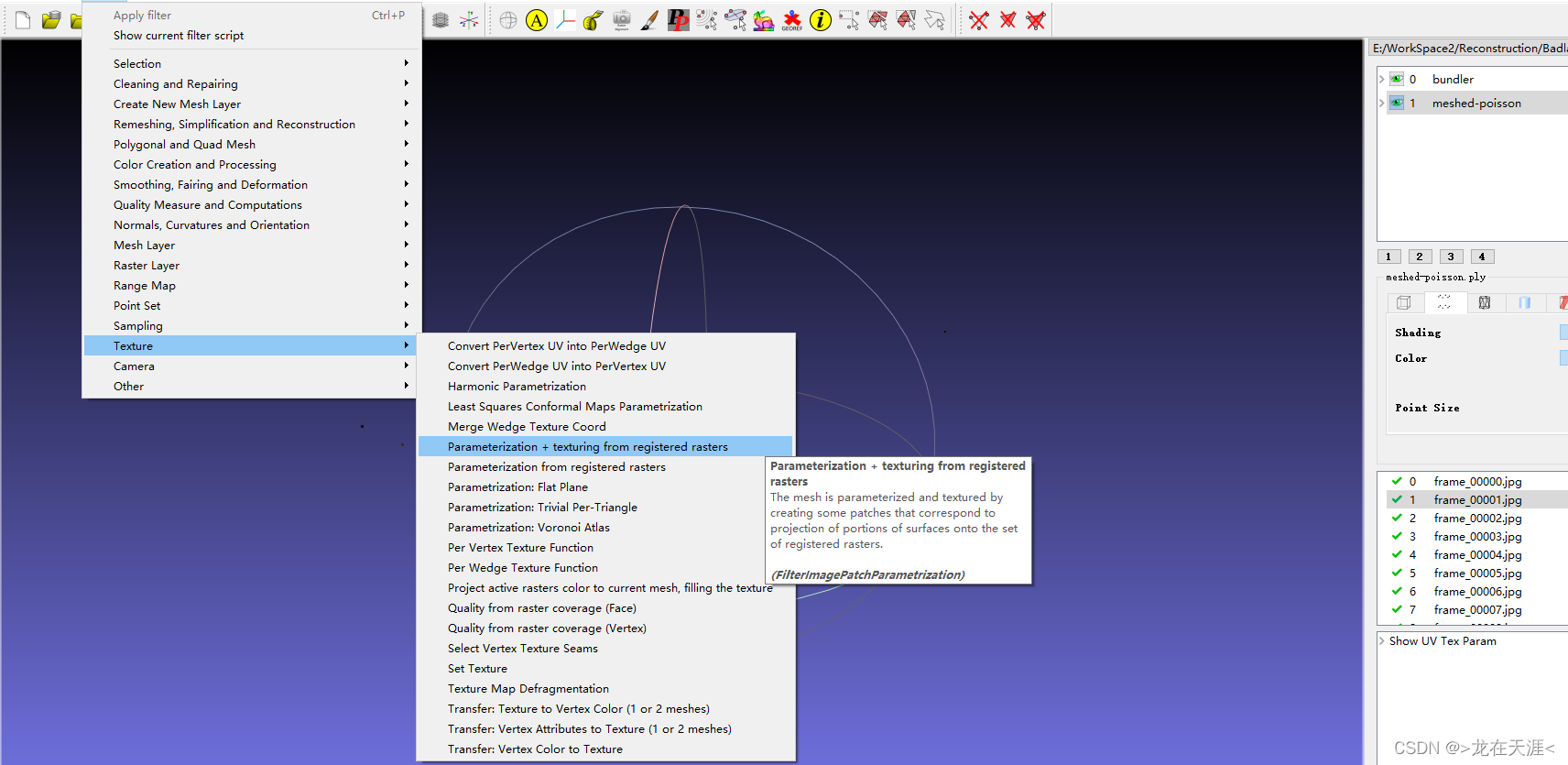
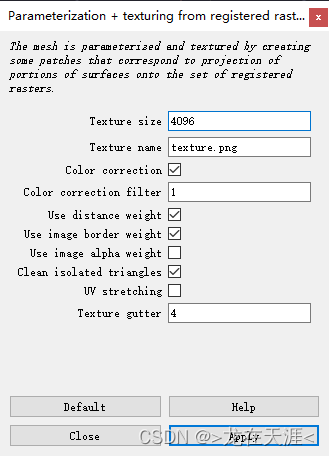
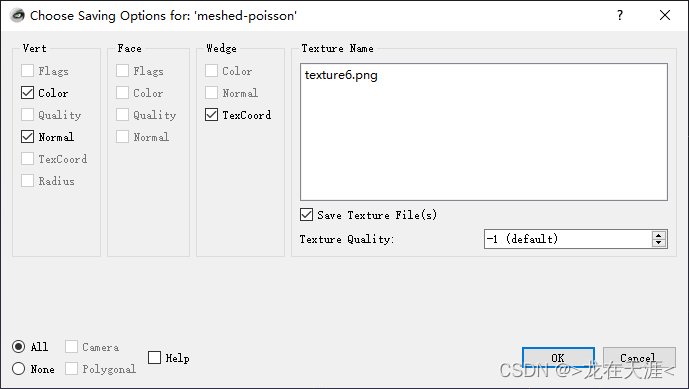
贴图
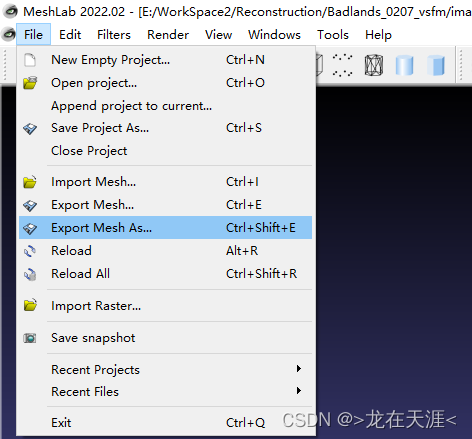
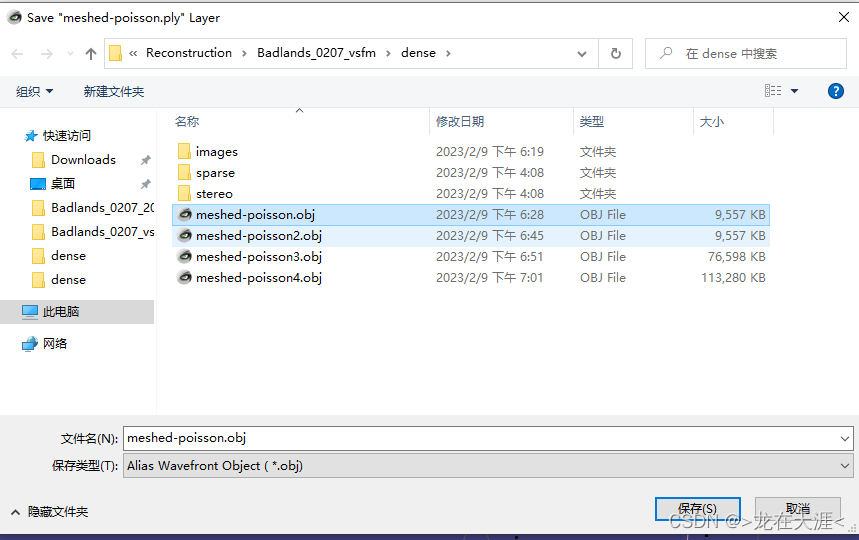
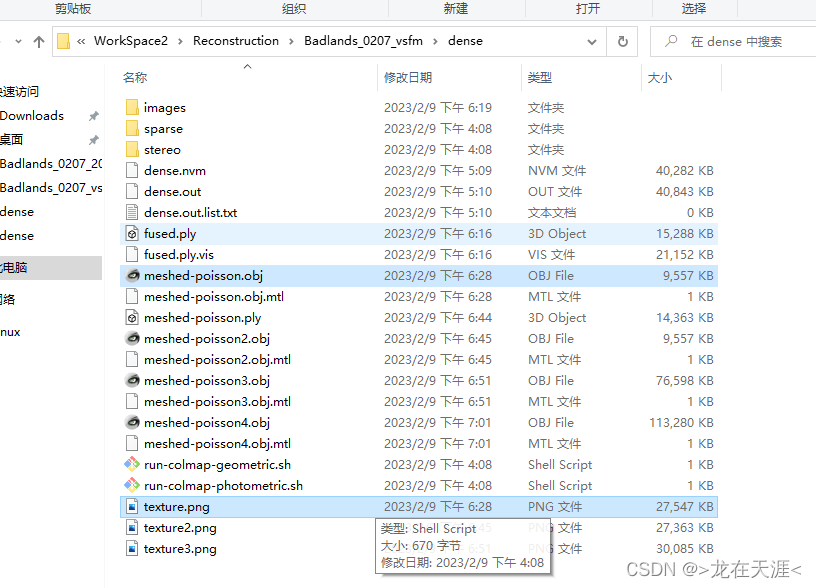
导出obj模型和贴图
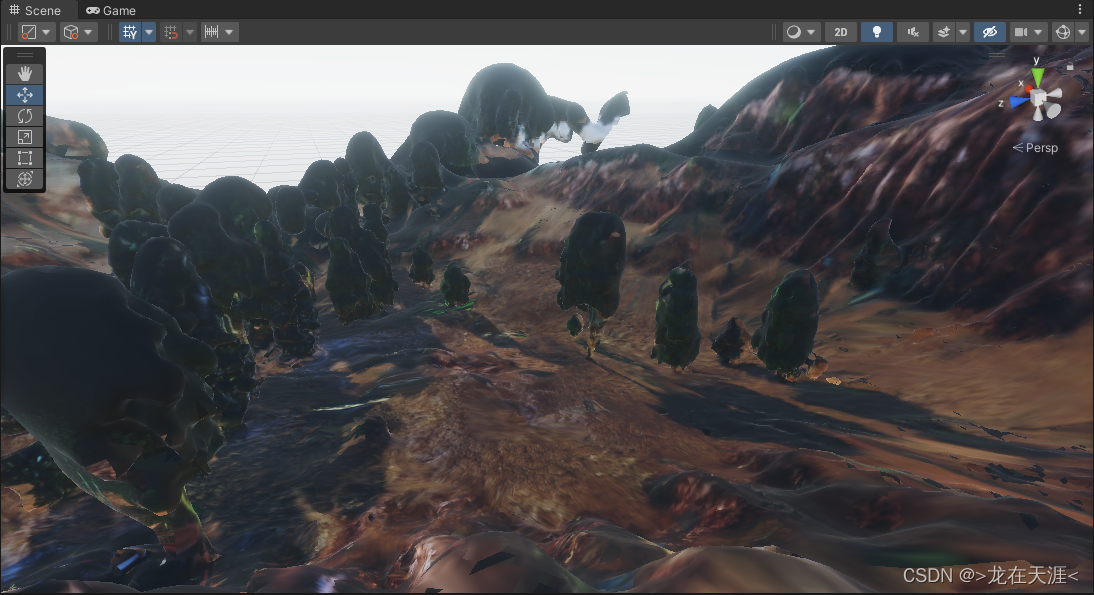
导入Unity查看
重建效果:
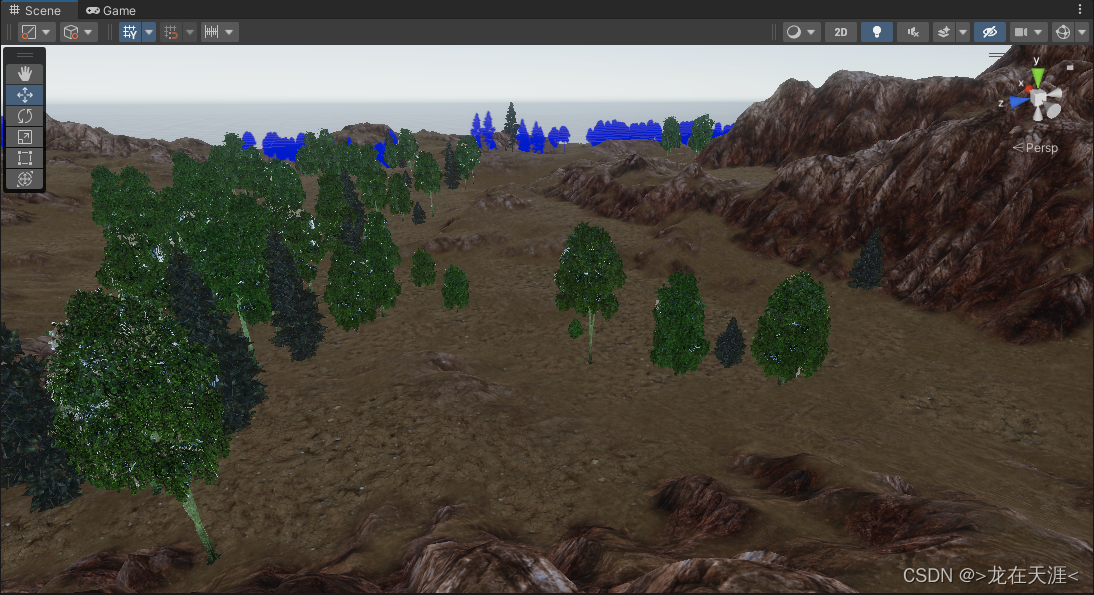
原始效果:
 Colmap教程:从稀疏到稠密的三维重建步骤,
Colmap教程:从稀疏到稠密的三维重建步骤,








 本文详细介绍了使用Colmap进行三维重建的过程,包括创建工程、特征提取、匹配、重建、去畸变、立体匹配、融合和网格生成。通过命令行和ColmapGUI程序,逐步完成从稀疏到稠密的3D模型构建,并在Meshlab中进行后期处理和贴图。
本文详细介绍了使用Colmap进行三维重建的过程,包括创建工程、特征提取、匹配、重建、去畸变、立体匹配、融合和网格生成。通过命令行和ColmapGUI程序,逐步完成从稀疏到稠密的3D模型构建,并在Meshlab中进行后期处理和贴图。

















 818
818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









