






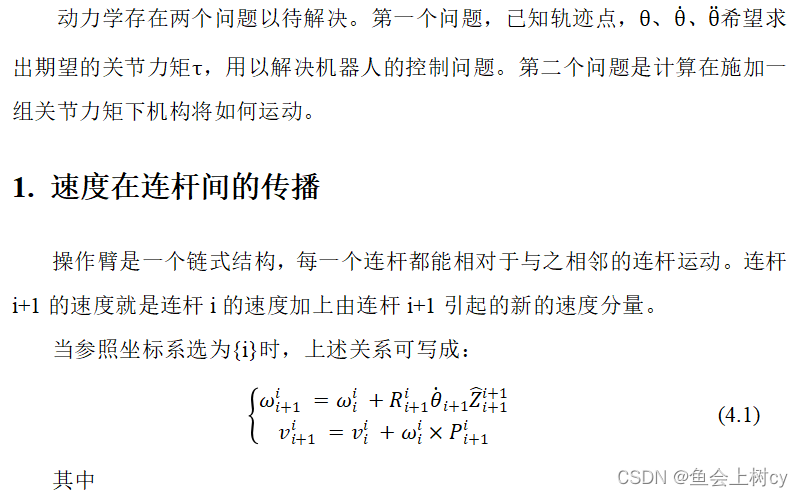
从现在开始进入机器人动力学。前面的正逆解和雅克比矩阵只是开胃小菜,动力学开始进入微观控制层面,难度也比前面的章节难一些,我打算用3个小结带大家入门机器人动力学。


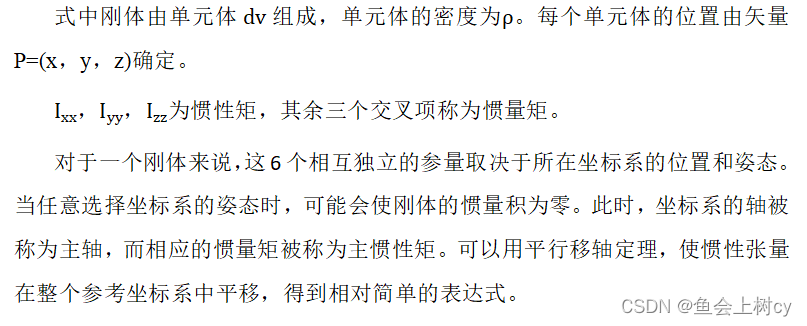
在实际的动力学中,质量分布都是已知的,不需要求解。

这一章就先到这里,以上4个基础知识足够求解机器人动力学中的牛顿欧拉递推式和拉格朗日方程了。
从现在开始进入机器人动力学。前面的正逆解和雅克比矩阵只是开胃小菜,动力学开始进入微观控制层面,难度也比前面的章节难一些,我打算用3个小结带大家入门机器人动力学。
在实际的动力学中,质量分布都是已知的,不需要求解。
这一章就先到这里,以上4个基础知识足够求解机器人动力学中的牛顿欧拉递推式和拉格朗日方程了。
 512
512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























