







动力学问题,简单来看,主要由两个问题组成:
已知一个轨迹点theta、theta_d、theta_dd,希望求出期望的关节力矩tau(逆运动学),这个问题及相应公式对机械臂的控制问题非常有用;
已知一个力矩矢量tau,计算出机械臂各关节的瞬态运动变量theta、theta_d、theta_dd(正运动学),这个问题对机械臂的运动仿真及控制非常有用。
准备知识:
通过上一篇的知识,知道了速度在连杆间的传播,静力平衡,以及刚体的质量分布,有了质量,和线速度就可用牛顿定理求出力,有了连杆的惯性张量和角速度,就可用欧拉方程求得力矩。
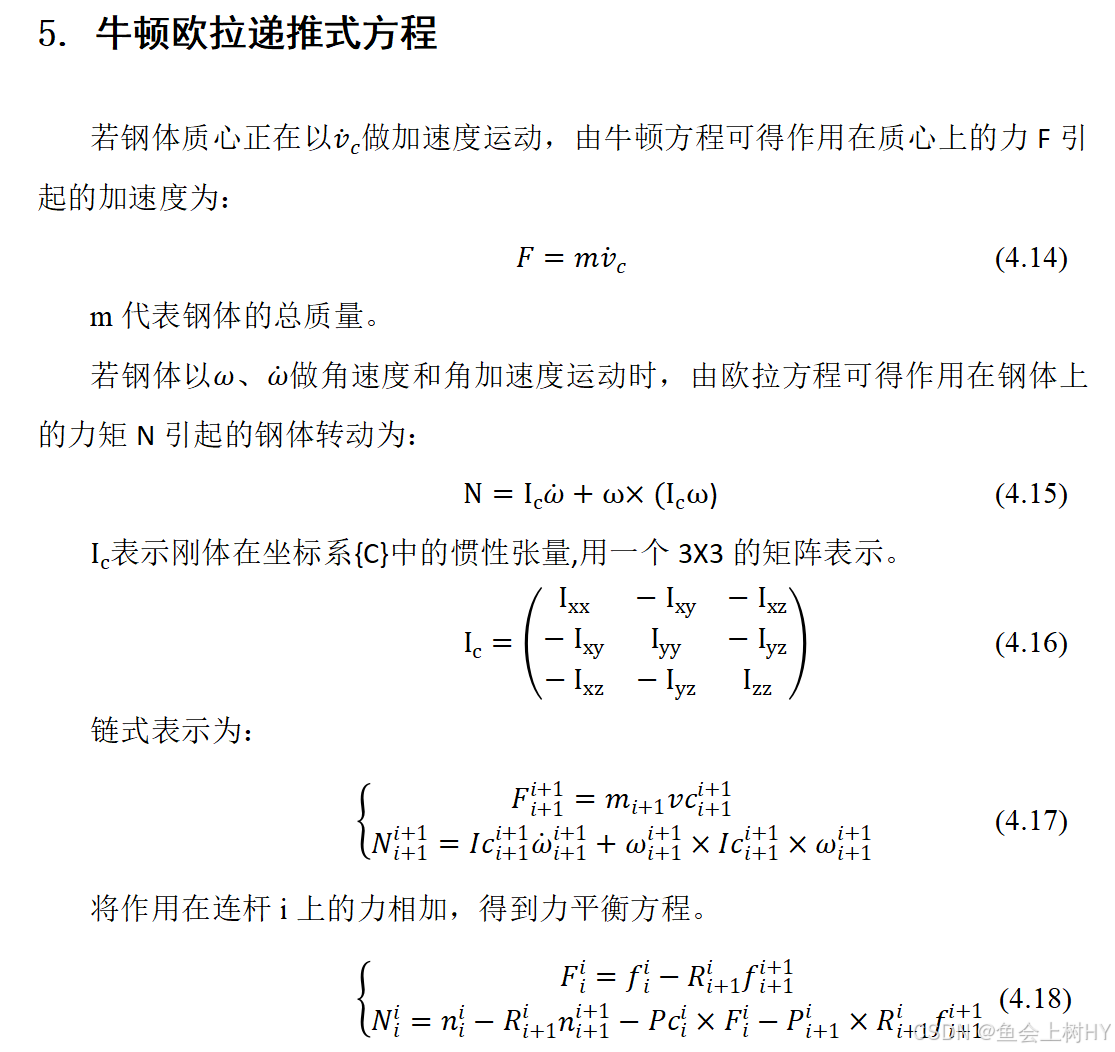
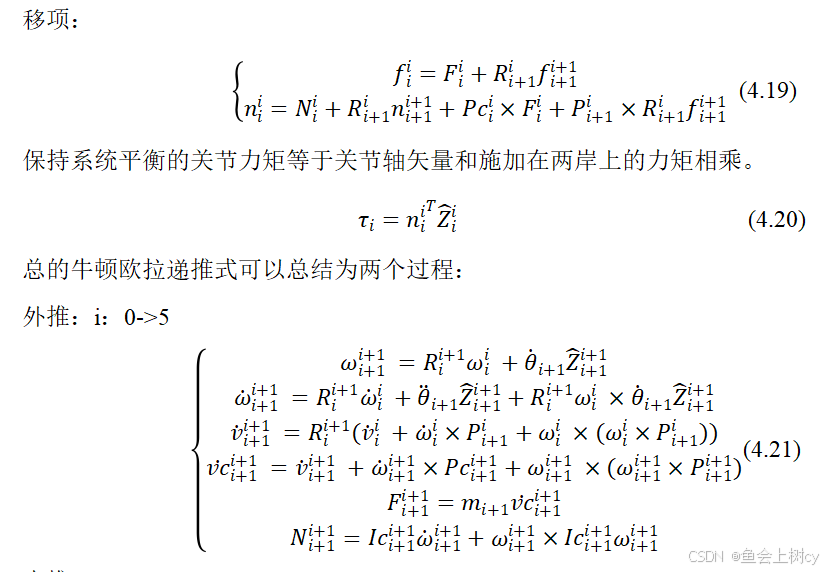
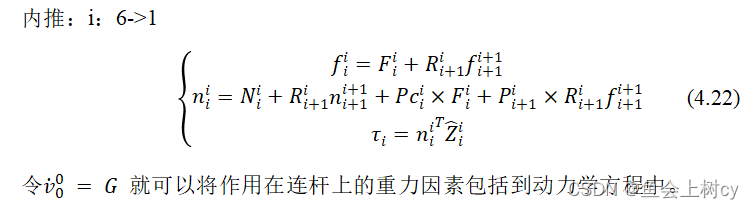
牛顿欧拉递推式的方程主要是(4.21)和(4.22)。可以看到,可以通过迭代的方式编程实现。
假设机械臂动力学参数如下:
| 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| Ixx | 0 | -2.782 | -0.6741 | 0.4964 | 0.0893 | -0.2332 |
| Ixy | 0 | 0. 086 | -0.3658 | -0.3109 | -0.0252 | 0. 0203 |
| Ixz | 0 | -0.8413 | 0.0373 | 0.1658 | -0.0699 | -0.0601 |
| Iyy | 0 | 0 | 0 | 0 | 0 | 0 |
| Iyz | 3.7033 | -0.1364 | 0.0377 | 0.2139 | 0.0325 | 0.0477 |
| Izz | 0 | 2.4741 | 1.0102 | -0.1213 | 0. 151 | 0.0763 |
| lx | 0 | 3. 5349 | 1.8417 | -0.0475 | -0.0202 | 0.0006 |
| ly | 0 | 0. 0939 | 0.0746 | 0.1624 | -0.0844 | 0.03 |
| lz | 0 | 0 | 0 | 0 | 0 | 0 |
| m | 0 | 10 | 10 | 10 | 10 | 10 |
MATLAB仿真验证
% 求齐次变换矩阵
function T = DHTrans(alpha, a, d, theta)
T= [cos(theta) -sin(theta) 0 a;
sin(theta)*cos(alpha) cos(theta)*cos(alpha) -sin(alpha) -sin(alpha)*d;
sin(theta)*sin(alpha) cos(theta)*sin(alpha) cos(alpha) cos(alpha)*d;
0 0 0 1];
end% 六自由度机械臂运动的牛顿-欧拉递归逆动力学求解:
% 参数:各关节运动角度, 速度, 加速度(全部6*1矩阵),刚体质量矩阵(1*6)
% 返回值:各关节力矩(6*1矩阵)
function tau = myNewtonEuler(theta, theta_d, theta_dd,m)
% 初始化
% 改进D-H参数
th(1) = theta(1)*pi/180; d(1) = 0.1607; a(1) = 0; alp(1) = 0;
th(2) = theta(2)*pi/180; d(2) = 0; a(2) = 0; alp(2) = pi/2;
th(3) = theta(3)*pi/180; d(3) = 0; a(3) = 0.425; alp(3) = 0;
th(4) = theta(4)*pi/180; d(4) = 0.1133; a(4) = 0.393; alp(4) = 0;
th(5) = theta(5)*pi/180; d(5) = 0.099; a(5) = 0; alp(5) = -pi/2;
th(6) = theta(6)*pi/180; d(6) = 0.0936; a(6) = 0; alp(6) = pi/2;
%base_link的各项初始值
w00 = [0; 0; 0]; v00 = [0; 0; 0]; w00d = [0; 0; 0]; v00d = [0; 0; 9.8];
z = [0; 0; 1];
% 各连杆质量
m1 = m(1); m2 = m(2); m3 = m(3); m4 = m(4); m5 = m(5); m6 = m(6);
% 惯性张量
I1 = [0 0 0; 0 0 0; 0 0 3.7033];
I2 = [-2.782 0.086 -0.8413; 0.086 0 -0.1364; -0.8413 -0.1364 2.4741];
I3 = [-0.6741 -0.3658 0.0373; -0.3658 0 0.0377; 0.0373 0.0377 1.0102];
I4 = [0.4964 -0.3109 0.1658; -0.3109 0 0.2139; 0.1658 0.2139 -0.1213];
I5 = [0.0893 -0.0252 -0.0699; -0.0252 0 0.0325; -0.0699 0.0325 0.151];
I6 = [-0.2332 0.0203 -0.0601; 0.0203 0 0.0477; -0.0601 0.0477 0.0763];
T01 = DHTrans(alp(1), a(1), d(1), th(1));
T12 = DHTrans(alp(2), a(2), d(2), th(2)+pi/2);
T23 = DHTrans(alp(3), a(3), d(3), th(3));
T34 = DHTrans(alp(4), a(4), d(4), th(4)-pi/2);
T45 = DHTrans(alp(5), a(5), d(5), th(5));
T56 = DHTrans(alp(6), a(6), d(6), th(6));
% 各关节p及各link质心pc的距离(假设质心在几何中心)
p10 = T01(1:3,4);p21 = T12(1:3,4); p32 = T23(1:3,4);
p43 = T34(1:3,4); p54 = T45(1:3,4);
p65 = T56(1:3,4); p76 = [0, 0, 0]';
pc11 = [0;0;0];pc22 = [3.5349;0.0939;0]; pc33 = [1.8417; 0.0746; 0];
pc44 = [-0.0475;0.1624;0]; pc55 = [-0.0202;-0.0844;0];
pc66 = [0.0006; 0.03;0];
% 旋转矩阵
R01 = T01(1:3, 1:3); R12 = T12(1:3, 1:3); R23 = T23(1:3, 1:3);
R34 = T34(1:3, 1:3); R45 = T45(1:3, 1:3); R56 = T56(1:3, 1:3);
R10 = R01'; R21 = R12'; R32 = R23';
R43 = R34'; R54 = R45'; R65 = R56';
R67 = [1 0 0; 0 1 0; 0 0 1];
%内推 i: 0->5
% 连杆1到连杆6向外迭代
% i = 0
w11 = R10*w00 + theta_d(1)*z;
w11d = R10*w00d + cross(R10*w00, z*theta_d(1)) + theta_dd(1)*z;
v11d = R10*(cross(w00d, p10) + cross(w00, cross(w00, p10)) + v00d);
vc11d = cross(w11d, pc11) + cross(w11, cross(w11, pc11)) + v11d;
F11 = m1*vc11d;
N11 = I1*w11d + cross(w11, I1*w11);
% i = 1
w22 = R21*w11 + theta_d(2)*z;
w22d = R21*w11d + cross(R21*w11, z*theta_d(2)) + theta_dd(2)*z;
v22d = R21*(cross(w11d, p21) + cross(w11, cross(w11, p21)) + v11d);
vc22d = cross(w22d, pc22) + cross(w22, cross(w22, pc22)) + v22d;
F22 = m2*vc22d;
N22 = I2*w22d + cross(w22, I2*w22);
% i = 2
w33 = R32*w22 + theta_d(3)*z;
w33d = R32*w22d + cross(R32*w22, z*theta_d(3)) + theta_dd(3)*z;
v33d = R32*(cross(w22d, p32) + cross(w22, cross(w22, p32)) + v22d);
vc33d = cross(w33d, pc33) + cross(w33, cross(w33, pc33)) + v33d;
F33 = m3*vc33d;
N33 = I3*w33d + cross(w33, I3*w33);
% i= 3
w44 = R43*w33 + theta_d(4)*z;
w44d = R43*w33d + cross(R43*w33, z*theta_d(4)) + theta_dd(4)*z;
v44d = R43*(cross(w33d, p43) + cross(w33, cross(w33, p43)) + v33d);
vc44d = cross(w44d, pc44) + cross(w44, cross(w44, pc44)) + v44d;
F44 = m4*vc44d;
N44 = I4*w44d + cross(w44, I4*w44);
% i = 4
w55 = R54*w44 + theta_d(5)*z;
w55d = R54*w44d + cross(R54*w44, z*theta_d(5)) + theta_dd(5)*z;
v55d = R54*(cross(w44d, p54) + cross(w44, cross(w44, p54)) + v44d);
vc55d = cross(w55d, pc55) + cross(w55, cross(w55, pc55)) + v55d;
F55 = m5*vc55d;
N55 = I5*w55d + cross(w55, I5*w55);
% i = 5
w66 = R65*w55 + theta_d(6)*z;
w66d = R65*w55d + cross(R65*w55, z*theta_d(6)) + theta_dd(6)*z;
v66d = R65*(cross(w55d, p65) + cross(w55, cross(w55, p65)) + v55d);
vc66d = cross(w66d, pc66) + cross(w66, cross(w66, pc66)) + v66d;
F66 = m6*vc66d;
N66 = I6*w66d + cross(w66, I6*w66);
% 外推: i: 6->1
% 连杆6到连杆1向内迭代
f77 = [0; 0; 0]; n77 = [0; 0; 0];
% i = 6
f66 = R67*f77 + F66;
n66 = N66 + R67*n77 + cross(pc66, F66) + cross(p76, R67*f77);
tau(6) = n66'*z;
% i = 5
f55 = R56*f66 + F55;
n55 = N55 + R56*n66 + cross(pc55, F55) + cross(p65, R56*f66);
tau(5) = n55'*z;
% i = 4
f44 = R45*f55 + F44;
n44 = N44 + R45*n55 + cross(pc44, F44) + cross(p54, R45*f55);
tau(4) = n44'*z;
% i = 3
f33 = R34*f44 + F33;
n33 = N33 + R34*n44 + cross(pc33, F33) + cross(p43, R34*f44);
tau(3) = n33'*z;
% i = 2
f22 = R23*f33 + F22;
n22 = N22 + R23*n33 + cross(pc22, F22) + cross(p32, R23*f33);
tau(2) = n22'*z;
% i =1
f11 = R12*f22 + F11;
n11 = N11 + R12*n22 + cross(pc11, F11) + cross(p21, R12*f22);
tau(1) = n11'*z;
end机器人工具箱验证
clear;
clc;
%各关节质量
m=[0 10 10 10 10 10];
% DH parameters th d a alpha sigma
L1=Link([ 0 0.1607 0 0 ],'modified');
L2=Link([ 0 0 0 pi/2 ],'modified');L2.offset = pi/2;
L3=Link([ 0 0 0.425 0 ],'modified');
L4=Link([ 0 0.1133 0.393 0 ],'modified');L4.offset = -pi/2;
L5=Link([ 0 0.099 0 -pi/2 ],'modified');
L6=Link([ 0 0.0936 0 pi/2 ],'modified');
thetaOffset=[0, pi/2, 0, -pi/2, 0, 0];
L1.Jm = 0; L2.Jm = 0; L3.Jm = 0; L4.Jm = 0; L5.Jm = 0; L6.Jm = 0;
L1.m = m(1); L2.m = m(2); L3.m = m(3);
L4.m = m(4); L5.m = m(5); L6.m = m(6);
% L1.r =
L1.I = [0 0 0; 0 0 0; 0 0 3.7033];
L2.I = [-2.782 0.086 -0.8413; 0.086 0 -0.1364; -0.8413 -0.1364 2.4741];
L3.I = [-0.6741 -0.3658 0.0373; -0.3658 0 0.0377; 0.0373 0.0377 1.0102];
L4.I = [0.4964 -0.3109 0.1658; -0.3109 0 0.2139; 0.1658 0.2139 -0.1213];
L5.I = [0.0893 -0.0252 -0.0699; -0.0252 0 0.0325; -0.0699 0.0325 0.151];
L6.I = [-0.2332 0.0203 -0.0601; 0.0203 0 0.0477; -0.0601 0.0477 0.0763];
% 质心位置
p10 = [0;0;0];p21 = [3.5349;0.0939;0]; p32 = [1.8417; 0.0746; 0];
p43 = [-0.0475;0.1624;0]; p54 = [-0.0202;-0.0844;0];
p65 = [0.0006; 0.03;0];
L1.r = p10; L2.r = p21; L3.r = p32;
L4.r = p43; L5.r = p54; L6.r = p65;
robot = SerialLink([L1, L2, L3, L4, L5, L6]);
robot.name='My_Robot';
theta = [pi, 0, pi, 0, 0, pi]*pi/180;
qd = [1 1 pi 1 1 1]; qdd = [1 1 1 pi 1 1];
tau_N = myNewtonEuler(theta*180/pi, qd', qdd',m);
tau = robot.rne(theta, qd, qdd, [0 0 9.8]);
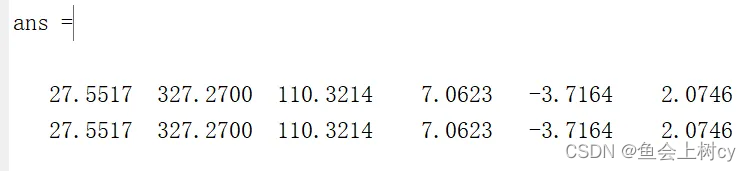
[tau_N;tau]MATLAB计算结果
当theta = [pi, 0, pi, 0, 0, pi]*pi/180; qd = [1 1 pi 1 1 1]; qdd = [1 1 1 pi 1 1];时结果如下,第一行为自己的牛顿欧拉递推式的结果,第二行为机器人工具箱的结果。
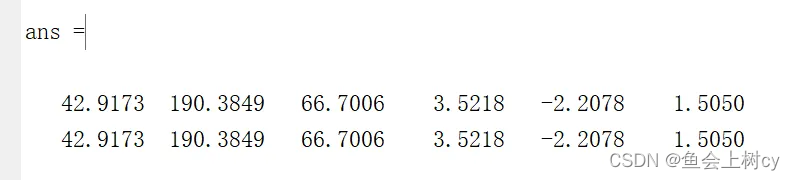
当theta = [pi, 0, pi/2, 0, pi/2, pi]*pi/180; qd = [1 1 pi 1 pi/2 1]; qdd = [1 pi/2 1 pi 1 1];时结果如下。
总结
牛顿欧拉递推式公式相对简单,代码实现相对比较简单。实现时注意递推的初始状态以及各参数的物理意义。
跟新记录:
2024-07-19 感谢评论区的小伙伴指出的错误,由于博主的不严谨,外推公式的F与N有误现已修改。

















 8030
8030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









