







感谢第 2 章 ROS通信机制 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
ROS到底是什么?不需要考虑博客说的什么什么角度,wiki说的那么玄乎。简单来说就是一个中间站,由上层订阅下层的节点,这样下层节点就能够与上层进行通讯(硬件就是节点,软件接受数据也是节点)
上层不一定是硬件,可能只是一个仿真软件,但就像我说的那样,我就订阅了你的信息罢了,和你有什么关系。
所以说什么定义什么理论都是次要的
ROS学习主要就是节点之间的发布与订阅环节,简单认为通过节点之间的信息交互就是通讯。
ROS文件系统
ROS文件系统非常的复杂,当初学习的时候就非常疑惑怎么src下面还有src,cmake配置怎么那么麻烦,但是学完SLAM后才发现ROS的核心——一个ROS工作空间(workspace)是一个已经规划好了的项目工程(project)。我们只需要自己定义src下面的代码,处理节点问题就可以了。
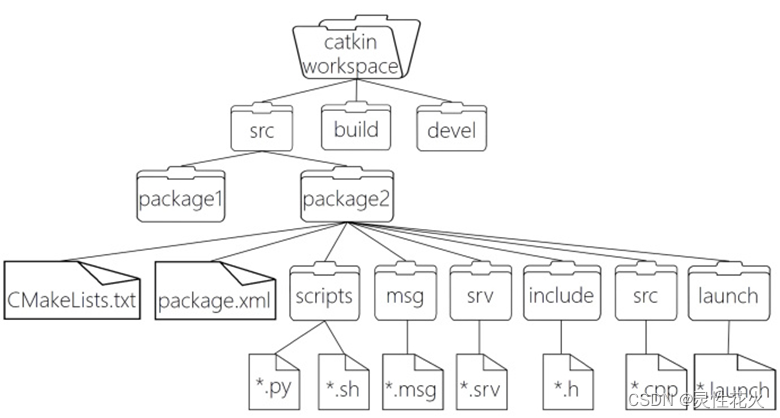
每个文件具体信息如下
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件,一般里面都是注释的模板,可以放开注释不需要自己写(感谢开发者)详细的需要看其他文档\ROS实践与导论.docx
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
Pachage操作
就像我说的那样,ROS最小单元是package
所以先学习功能包的操作:
1.增
catkin_create_pkg 自定义包名 依赖包 === 创建新的ROS功能包
sudo apt install xxx === 安装 ROS功能包
2.删(一般新建之后就会有一系列的链接,不建议暴力删除)
sudo apt purge xxx ==== 删除某个功能包
3.查
rospack list === 列出所有功能包
rospack find 包名 === 查找某个功能包是否存在,如果存在返回安装路径
roscd 包名 === 进入某个功能包
rosls 包名 === 列出某个包下的文件
apt search xxx === 搜索某个功能包
4.改(同理不建议暴力修改)
rosed 包名 文件名 === 修改功能包文件
需要安装 vim
比如:rosed turtlesim Color.msg
5.执行
Roscore——ros 会自动启动ros master、ros 参数服务器、rosout 日志节点
rosrun 包名 可执行文件名 ——运行指定的ROS包中的节点
roslaunch 包名 launch文件名 —— 执行某个包下的 launch 文件(这个launch后面会说)
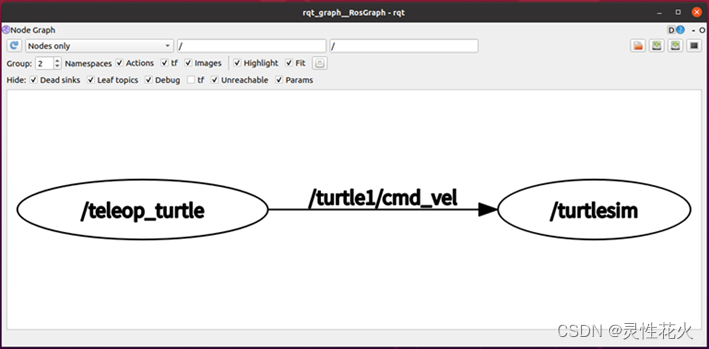
计算图
就像之前说的:一个ROS工程是由众多的功能包实现的,功能包中的节点更为复杂。为了能够理清包中的节点。ROS提供了可视化工具rqt_graph。能够直观的看出这两者之间的关系.
安装:
ROS版本名称(比如:kinetic、melodic、Noetic等)来替换掉<distro>
sudo apt install ros-<distro>-rqt
sudo apt install ros-<distro>-rqt-common-plugins
使用(rosrun运行时查看)
rosrun rqt_graph rqt_graph
优化配置
终端
这个终端能够解决新建多个终端问题
sudo apt install terminator
ctrl+alt+t打开
其他快捷键略(自己查)
VSCode配置
最喜欢的配置编译器
下载:https://code.visualstudio.com/updates
安装:sudo dpkg -i xxxx.deb
卸载:sudo dpkg --purge code
配置:进入vscode下载c/c++、chinese、CMAKE TOOLS、Python、ROS。
使用:
1终端创建 ROS 工作空间(可以直接在vscode终端实现)
mkdir -p xxx/src(必须得有 src)
cd xxx
catkin_make
2启动 vscode
进入 xxx_ws 启动 vscode
cd xxx_ws
code .
3 vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
点击配置
修改.vscode/tasks.json 文件
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
4 创建 ROS 功能包
选定 src 右击 ---> create catkin package
设置包名
添加依赖roscpp rospy std_msgs
5 C++ 实现
在功能包的 src 下新建 cpp 文件
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"//报错看ps1
int main(int argc, char *argv[])//直接打main然后回车但是要删除const ps2
{
setlocale(LC_ALL,"");//中文
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");//没有该
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
}
PS1: 如果没有代码提示
修改 .vscode/c_cpp_properties.json
设置 "cppStandard": "c++17"
有就直接修改版本,没有就要加一行,还不行再加 "cStandard": "c11",(gnu17改成c11)
PS2: main 函数的参数不可以被 const 修饰
PS3: 当ROS__INFO 终端输出有中文时,会出现乱码
INFO: ????????????????????????
解决办法:在函数开头加入下面代码的任意一句
setlocale(LC_CTYPE, "zh_CN.utf8");
setlocale(LC_ALL, "");
6 python 实现(略,有点不一样)
7 配置 CMakeLists.txt
C++ 配置:
找到CMakeList.txt中的:
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)
8 编译执行
编译: ctrl + shift + B
执行: 和之前一致,只是可以在 VScode 中添加终端,
首先执行:source ./devel/setup.bash(下面语句必须在同一个终端)
然后输入rosrun 功能包名 节点名















 1546
1546











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









