






线控制动系统仿真。
Carsim和Simulink联合仿真线控制动系统BBW-EMB系统。
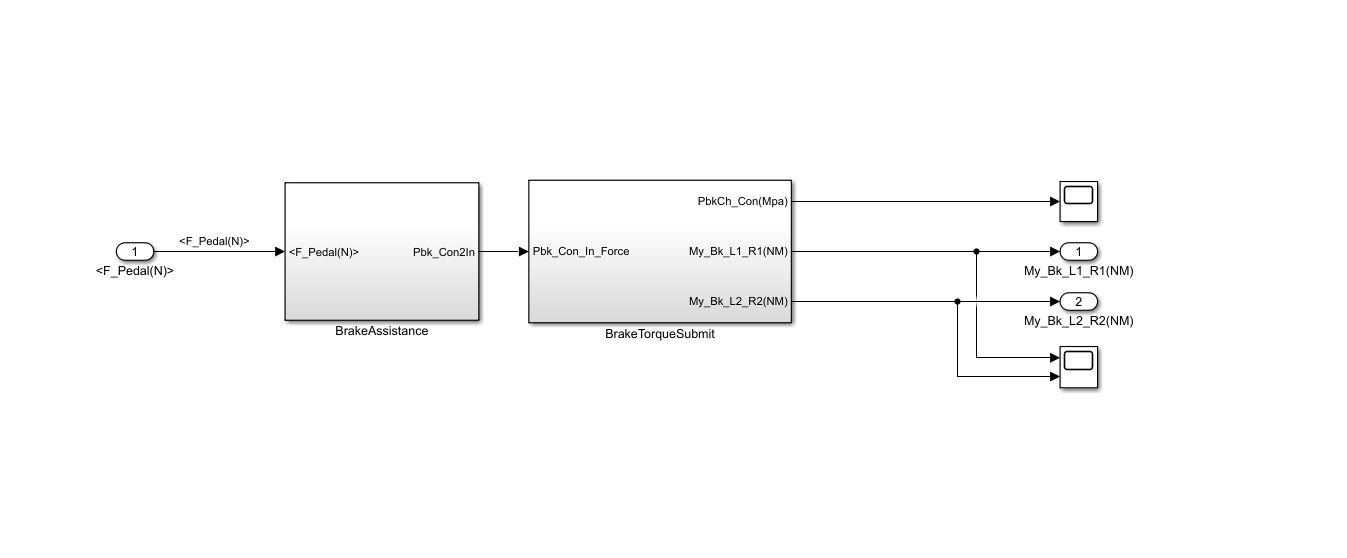
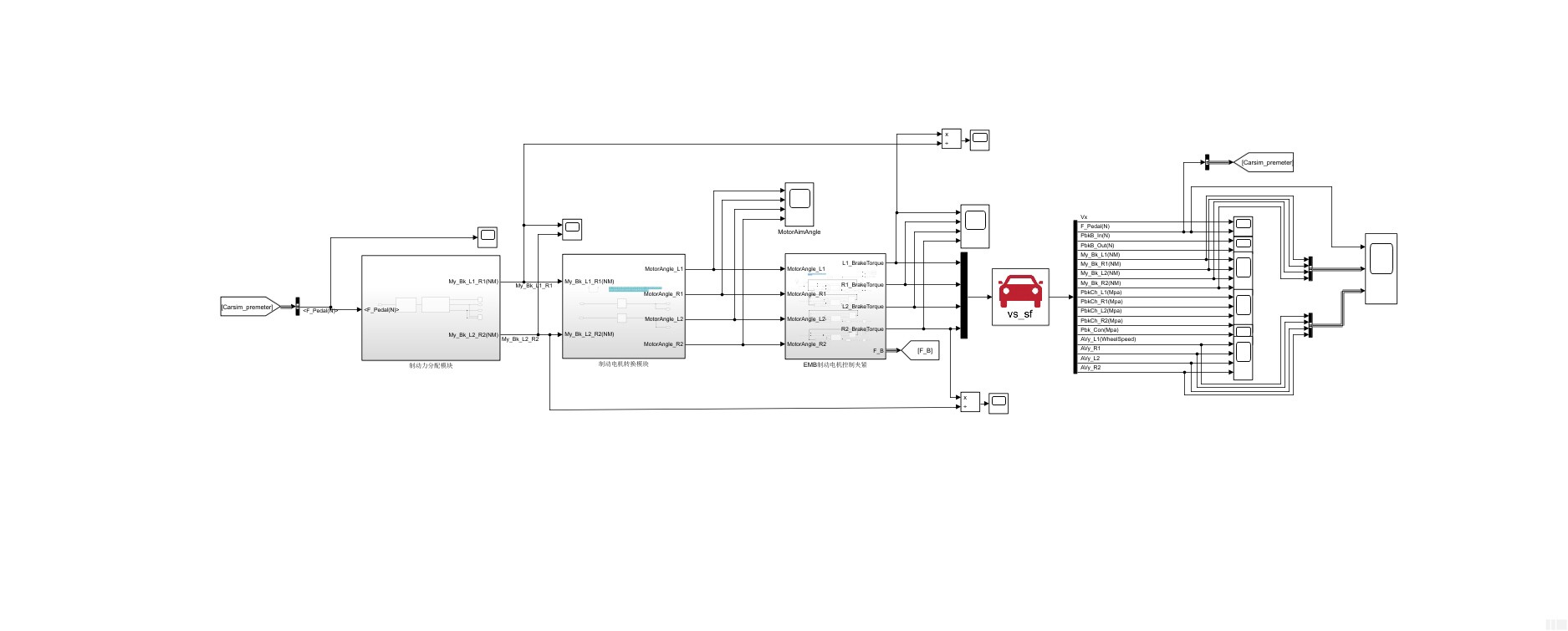
包含简单的制动力分配和四个车轮的线控制动机构!
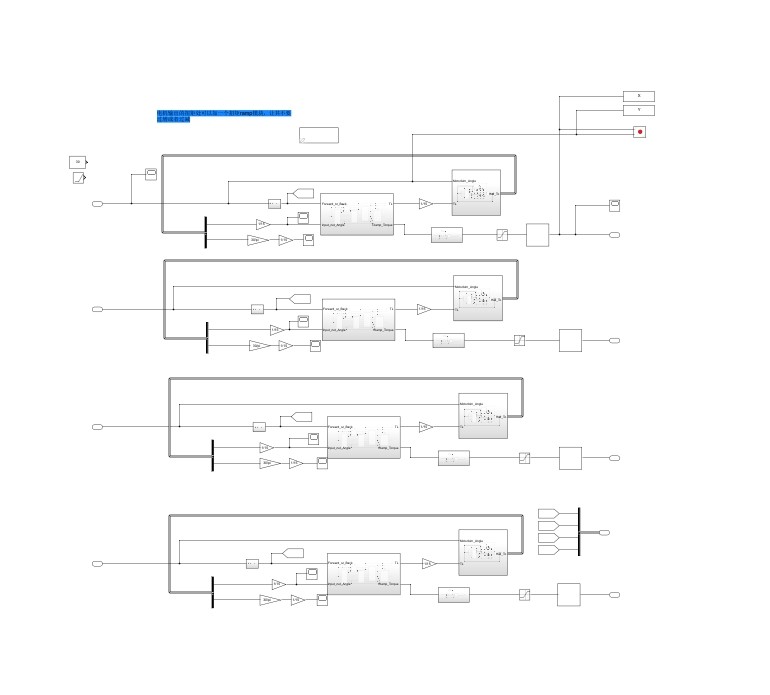
四个车轮独立BLDCM三环PID闭环制动控制,最大真实还原线控制动系统结构。
本模型中未自定义 【踏板力】 模块,但是可以根据自己的需求设置踏板力,如有需要可以自己拿去进一步开发。
【制动力分配】功能采用的是Carsim自带的分配方式,并对该模块进行了模块化设计,也可以根据个人需要进一步开发使用自己设计的模块,使用Carsim自带的是为了更好的与Carsim制动做对比。
模型中未集成Abs功能,如有需要可以去主页中了解abs功能,然后自己集成进去。
图中:
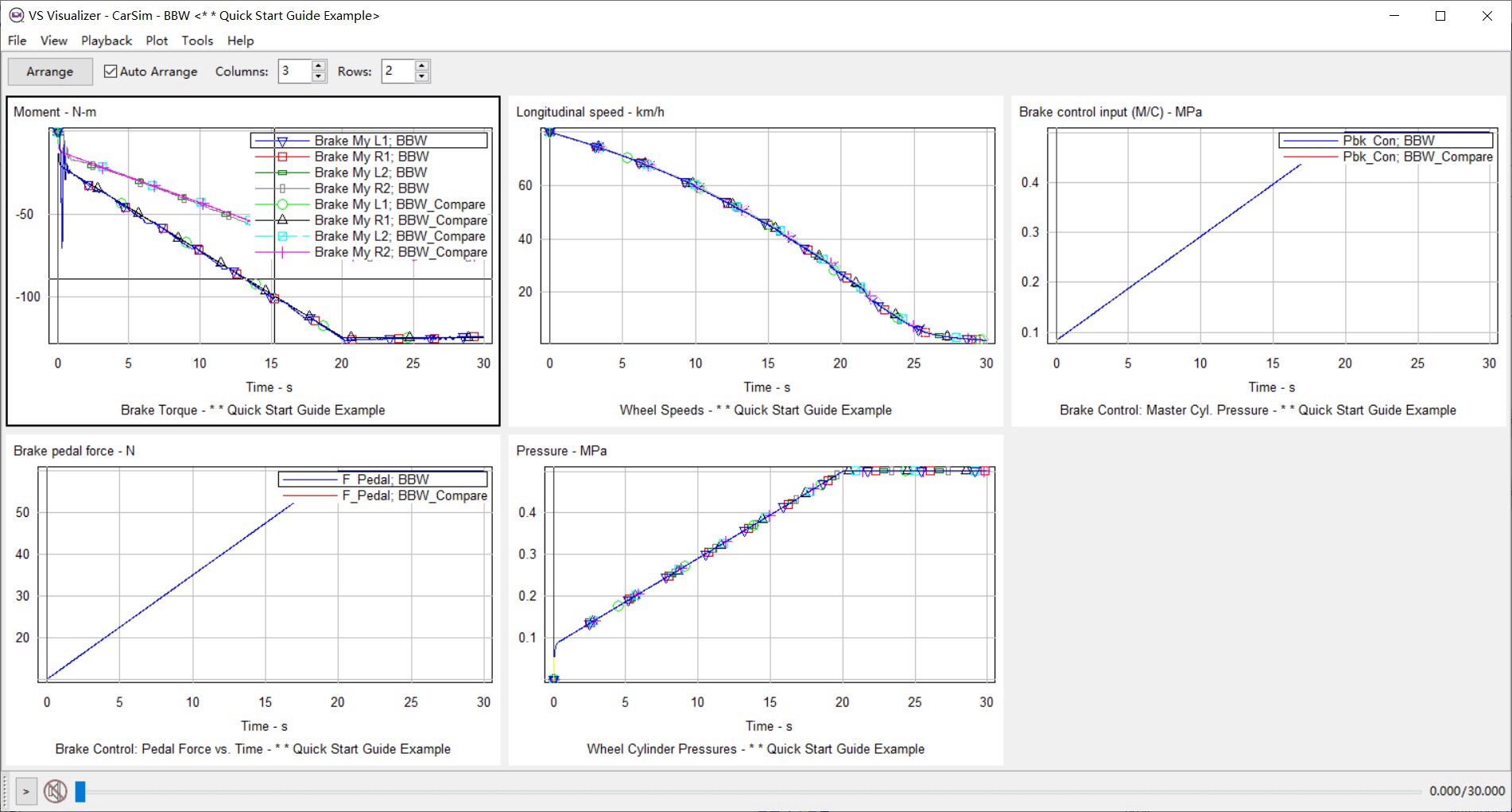
1. Carsim原有的液压制动和本模型线控制动的对比。
2/3/4/5. 模型内图片。
所建模型在采用Carsim制动力分配算法时,可以很好的还原Carsim原有的制动响应。
可以直接拿去做进一步开发。
ID:77154708420221114
醉里挑灯看客
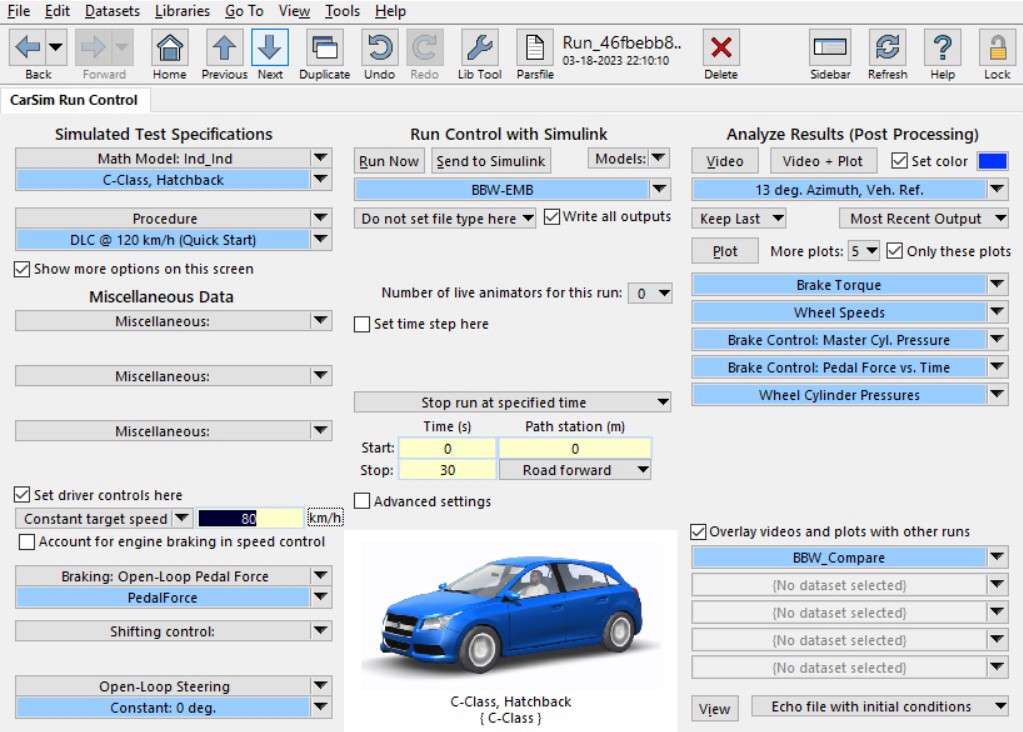
线控制动系统是现代汽车中常见的一种制动系统,它通过电子控制单元(ECU)来控制车辆的制动过程,使之更加精确和灵敏。本文将介绍一种基于Carsim和Simulink联合仿真的线控制动系统BBW-EMB系统,并详细讨论其制动力分配和线控制动机构。
首先,我们来介绍一下本系统的基本结构。BBW-EMB系统包含了简单的制动力分配和四个车轮的线控制动机构。在四个车轮独立的线控制动机构中,使用了BLDCM(Brushless DC Motor)作为执行器,并采用三环PID闭环制动控制算法,以实现对每个车轮的精确控制。这种架构实现了对线控制动系统结构的最大真实还原。
在本模型中,我们并未自定义踏板力模块,但是用户可以根据自己的需求进行踏板力的设置。这样设计的目的是为了让用户可以更灵活地进行进一步的开发和定制。
另外,制动力分配功能采用了Carsim自带的分配方式,并对该模块进行了模块化设计。用户也可以根据个人需要进行进一步的开发,使用自己设计的模块。使用Carsim自带的制动力分配模块是为了更好地与Carsim制动模型进行对比和验证。在本模型中并未集成Abs功能,如果用户有需要,可以参考主页中的相关信息,并将其集成到本模型中。
下图(图1)展示了Carsim原有的液压制动与本模型线控制动的对比。可以看出,本模型在采用Carsim制动力分配算法时,能够很好地还原Carsim原有的制动响应,这为用户进一步的开发提供了可靠的基础。
此外,本模型内还包含了一些图片(图2、图3、图4、图5),以更加直观地展示模型的结构和运行情况。用户可以根据需要进行查看和分析。
综上所述,本文介绍了一种基于Carsim和Simulink联合仿真的线控制动系统BBW-EMB系统。通过简单的制动力分配和四个车轮的线控制动机构,以及BLDCM三环PID闭环制动控制算法,实现了对线控制动系统结构的最大真实还原。用户可以根据自己的需求进行定制和进一步的开发。本模型在采用Carsim制动力分配算法时,能够很好地还原Carsim原有的制动响应,具有良好的可靠性和实用性。用户可以直接拿去进行进一步的开发和应用。
(以上内容仅为作者观点,不代表本社区立场)
【相关代码,程序地址】:http://fansik.cn/708420221114.html
















 2676
2676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









