






四轮轮毂电机驱动车辆电机附加能量损耗、电机能量总损耗、轮胎滑移能量与车辆稳定性之间的协调优化控制、仿真搭建
整体采用分层控制策略。
其中顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。
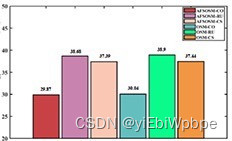
为了减少车辆速度影响,设计了纵向速度跟踪控制器;底层控制器的任务是在充分保证车辆稳定性的同时,尽可能的减少电机附加能量损耗、轮胎滑移能量、电机总能耗等。
顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制、MPC控制等(发其中一个,默认发滑模和pid控制器)。
原则上上层和下层各发一个,有特殊要求请指明提前说出。
说明:驾驶员模型采用CarSim自带的预瞄模型(Simulink驾驶员模型请单独拿后);速度跟踪可加可不加,采用的是PID速度跟踪控制器。
(下层默认发附加能量损耗)
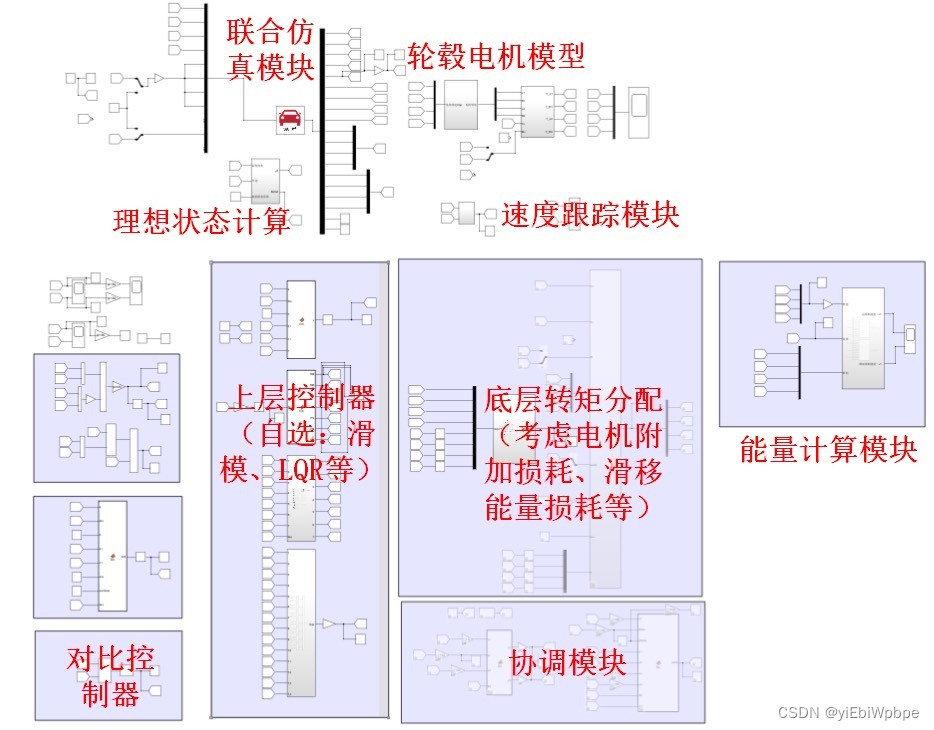
Simulink模型包括:理想状态计算模块、速度跟踪模块、轮毂电机模型、顶层控制器、底层控制器。
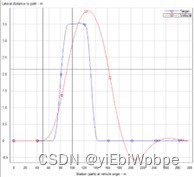
Simulink以及CarSim联合仿真进行验证,效果良好。
保证运行成功。

四轮轮毂电机驱动车辆是一种新型的电动车辆技术,它通过将电机直接集成在车轮上,实现了对每个轮子独立驱动的能力。然而,这种新技术也带来了一些问题,其中之一就是附加能量损耗。本文将围绕四轮轮毂电机驱动车辆的附加能量损耗、电机能量总损耗、轮胎滑移能量以及车辆稳定性之间的协调优化控制展开讨论,并提出了一种基于分层控制策略的控制方法。
在四轮轮毂电机驱动车辆中,由于电机的存在,会带来一定的能量损耗。这是因为电机本身会有一定的能量损耗,同时,电机的旋转也会导致轮胎滑移,从而进一步增加能量损耗。为了提高整个系统的能量利用效率,我们需要对电机附加能量损耗进行控制。
为了实现车辆稳定性的控制,我们采用了分层控制策略。在这种策略下,顶层控制器的任务是根据车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。为了减少车辆速度对控制的影响,我们设计了纵向速度跟踪控制器。这些控制器的任务是在保证车辆稳定性的前提下,尽可能减少电机附加能量损耗、轮胎滑移能量和电机总能耗。
在顶层控制器中,我们采用了滑模控制(SMC)、LQR控制、PID控制、鲁棒控制和MPC控制等多种控制方法。其中,滑模控制和PID控制是最常用的控制方法。滑模控制通过引入滑模面来实现控制目标,具有快速响应和强鲁棒性的特点,适用于控制系统非线性和不确定性较强的情况。而PID控制则是一种经典的控制方法,通过比例、积分和微分三个控制环节来实现对系统的控制。
在底层控制器中,我们的目标是在保证车辆稳定性的同时,尽可能减少电机附加能量损耗、轮胎滑移能量和电机总能耗。具体的控制方法可以根据实际情况来选择,可以采用先进的最优控制方法,也可以简单地使用传统的控制方法。
在仿真方面,我们使用Simulink进行模型建立和验证。Simulink模型包括理想状态计算模块、速度跟踪模块、轮毂电机模型、顶层控制器和底层控制器。通过与CarSim联合仿真,我们验证了该控制策略的有效性,取得了良好的效果。
综上所述,本文围绕四轮轮毂电机驱动车辆的附加能量损耗、电机能量总损耗、轮胎滑移能量与车辆稳定性之间的协调优化控制进行了讨论。通过采用分层控制策略以及合适的控制方法,我们可以在保证车辆稳定性的前提下,尽可能减少能量损耗。同时,Simulink模型和CarSim联合仿真的验证结果也证明了该控制策略的有效性。希望本文的研究对于进一步提高四轮轮毂电机驱动车辆的性能具有一定的参考价值。
相关代码,程序地址:http://lanzoup.cn/756956022393.html















 673
673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









