






介绍
根据视觉SLAMs十四讲的讲解,运行课后代码,调bug心得体会。
使用的是Ubuntu18.04虚拟机+vscode
一、安装Eigen库
参考:http://dljz.nicethemes.cn/news/show-59497.html
1、终端直接安装
sudo apt-get install libeigen3-dev
(之前没有保存截图,故借用链接中的截图)

安装完成后是这样的
2、例程演示
//终端按顺序输入如下命令
//找到程序所在位置slambook2/ch3
- cd useEigen
- mkdir build
- cd build
- cmake …
- make
- ./eigenMatrix

二、安装Pangolin
1、安装Pangolin所需依赖
- sudo apt install libgl1-mesa-dev
- sudo apt install libglew-dev
- sudo apt install cmake
- sudo apt install libpython2.7-dev
- sudo apt install python-pip
- sudo python -mpip install numpy pyopengl Pillow pybind11
- sudo apt install pkg-config
- sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
- sudo apt install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev
- sudo apt install libdc1394-22-dev libraw1394-dev
- sudo apt install libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev
2、去进入文件夹slambook2/3rdparty安装,然后再解压:
cd Pangolin
mkdir build
cd build
cmake …
make -j8
sudo make install
3、检查是否安装成功
编译完,可以运行以下命令测试,如果显示出一个彩色立方体,并且可以通过鼠标左、右键和滚轮按住拖拽,就表示 Pangolin 安装成功了。
- cd examples/HelloPangolin
- ./HelloPangolin
- mkdir build
- cmake …
- make
- ./HelloPangolin

三、bug调试
1、解决cannot find trajectory file at ./examples/trajectory.txt
找不到.txt文件位置,只需在.cpp文件中进行修改文件路径即可。
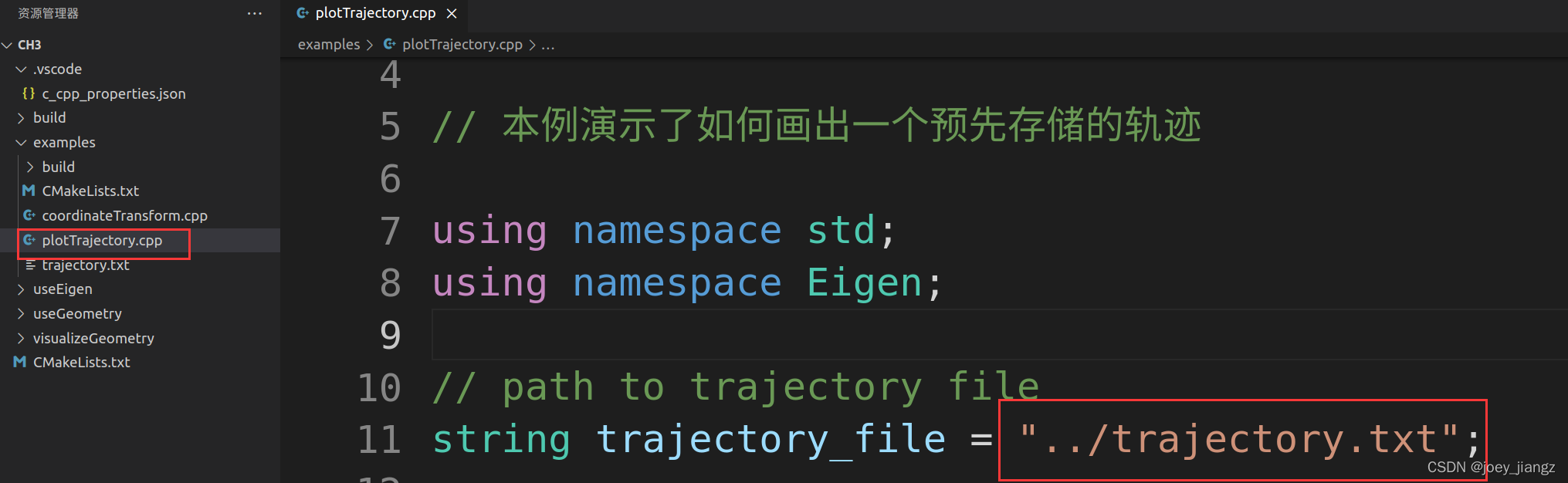
注:
(1)此处改为了相对路径
(2)也可以改为绝对路径"home/xxxx/slambook2/ch3/examples/trajectory.txt"
(3)或者将trajectory.txt移到examples文件夹中
2、找不到Eigen和pangolin的路径


解决办法:
(1)打开配置文件,添加路径

(2)将下面两行语句添加到路径中
/usr/include/eigen3
/home/joeyjiang/slambook2/3rdparty/Pangolin/include

3、camke版本的声明
在工程中已经声明了,但是报错了,之后在子工程里面重新声明了一次,解决了。对cmake也不是很懂,感觉挺奇怪的。

在子工程里面重新声明了一次。

总结
运行结果

留此博客以作笔记,与友共勉。















 921
921











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









