







硬件设备
Realsense D405
Realman 65b
软件环境搭建
软件环境依赖:
librealsense
https://github.com/IntelRealSense/librealsense.git
ROS1.0
ros-noetic-aruco
sudo apt-get install ros-noetic-aruco*
realsense_ros
https://github.com/IntelRealSense/realsense-ros.git
rm_robot
https://github.com/RealManRobot/rm_robot.git
下载标定软件
mkdir -p handeye_ws/src && cd handeye_ws/src
git clone https://github.com/HenryWJL/hand_eye_calibration
cd ../catkin_make
这里软件使用jaka虚拟机械比进行标定,因系需要进行适配。进入/home/kyle/ROS_Packages/handeye_ws/src/hand_eye_calibration/scripts修改hand_to_eye_calib.py代码以适配睿尔曼机械臂:
### 导入Pose包
from geometry_msgs.msg import TwistStamped, Pose
### 注释原有的位姿订阅callback
# def get_end2base_mat(pose):
# # Calculating the gripper-to-base transformation matrix
# tran = np.array((pose.twist.linear.x, pose.twist.linear.y, pose.twist.linear.z))
# rot = tfs.euler.euler2mat(pose.twist.angular.x, pose.twist.angular.y, pose.twist.angular.z)
# return rot, tran
### 订阅睿尔曼机械臂消息,并使用geometry_msgs.msg/Pose
### 有可能需要解算逆坐标
def get_end2base_mat(pose):
# Calculating the gripper-to-base transformation matrix
tran = np.array((pose.position.x, pose.position.y, pose.position.z))
# rot = tfs.euler.euler2mat(pose.orientation.x, pose.orientation.y, pose.orientation.z)
rot = tfs.quaternions.quat2mat([pose.orientation.w, pose.orientation.x, pose.orientation.y, pose.orientation.z])
# invert
# tran = -np.array(rot).T * tran
# rot = np.array(rot).T
return rot, tran
...
### 机械臂订阅睿尔曼位姿话题
rospy.Subscriber('/rm_driver/Pose_State', Pose, end_pose_callback, queue_size=10)
...
### 打印不同形式位姿,方便检查
print("="*60)
print("R_cam2end")
print("Transform:")
print(cam2base) # Transformation matrix
R_cam2base_quaternions = tfs.quaternions.mat2quat(R_cam2base)
cam2base_quaternions = np.concatenate((T_cam2base.reshape(3),
R_cam2base_quaternions.reshape(4)), axis=0)
print("Quaternions:")
print(cam2base_quaternions.tolist()) # Quaternions
R_cam2base_euler = tfs.euler.mat2euler(R_cam2base)
print("Euler angles:")
print(R_cam2base_euler[0]/np.pi*180, R_cam2base_euler[1]/np.pi*180, R_cam2base_euler[2]/np.pi*180)
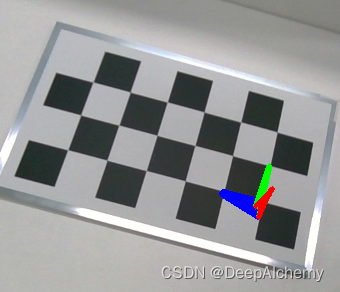
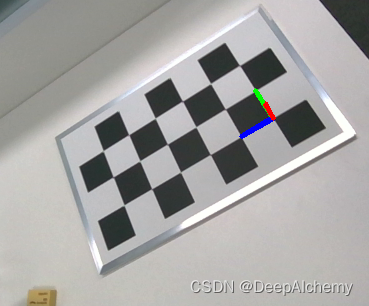
修改标定板识别参数,这里使用的是棋盘格标定板。/home/kyle/ROS_Packages/handeye_ws/src/hand_eye_calibration/launch中checkerboard_start.launch文件:
<arg name="image_topic" default="/camera/color/image_raw"/>
<arg name="camera_info" default="/camera/color/camera_info"/>
<arg name="cornerX" default="6"/>
<arg name="cornerY" default="3"/>
<arg name="gridLength" default="0.05"/>
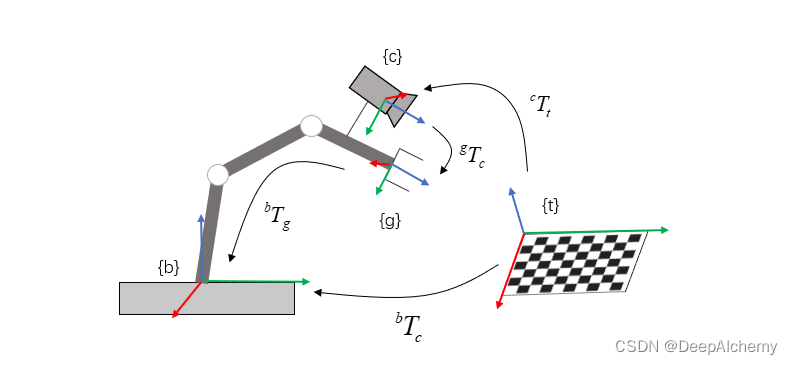
标定过程(眼在手上)
原理见下图,总的过程为采集数据,解一个方程 AX=XB。
#console1
roslaunch rm_control rm_65_control.launch &
roslaunch rm_bringup rm_65_robot.launch
#console2
roslaunch realsense2_camera rs_camera.launch
#console3
roslaunch hand_eye_calibration checkerboard_start.launch
#console4
rosrun hand_eye_calibration hand_to_eye_calib.py
标定程序启动后,不停摆动机械臂位姿,均使相机拍摄标定板。采集样本输入r命令,计算位姿输入c命令,退出输入q命令,采集样本>3个。
Record: r, Calculate: c, Save: s, Quit: q
r
[[-0.7599338 0.0060974 0.64997188]
[ 0.04182341 0.99834257 0.03953361]
[-0.64865354 0.05722697 -0.75892928]]
1 samples have been recorded
Record: r, Calculate: c, Save: s, Quit: q
r
[[-0.74060468 0.49582793 0.45349683]
[ 0.56793266 0.82259485 0.02811064]
[-0.35910612 0.27837454 -0.89081447]]
2 samples have been recorded
rRecord: r, Calculate: c, Save: s, Quit: q
[[-0.81163333 -0.14185728 0.56668144]
[-0.26747336 0.95265154 -0.14461342]
[-0.51933548 -0.26894526 -0.81114679]]
3 samples have been recorded
Record: r, Calculate: c, Save: s, Quit: q
r
[[-0.67410916 0.1870448 0.71455657]
[ 0.22764802 0.97292509 -0.03991421]
[-0.70267576 0.13576085 -0.69843809]]
4 samples have been recorded
c
Record: r, Calculate: c, Save: s, Quit: q
============================================================
R_cam2end
Transform:
[[ 0.02341403 0.96697815 0.25378148 -0.08822873]
[-0.99964886 0.01949493 0.01794709 0.00566516]
[ 0.01240699 -0.25411258 0.96709506 0.07756586]
[ 0. 0. 0. 1. ]]
Quaternions:
[-0.08822872609559883, 0.005665157492463942, 0.07756585852038214, 0.7088730522093655, -0.09594795174349201, 0.08512613400089308, -0.6935751781297171]
Euler angles:
-14.72216660609419 -0.7108864356472807 -88.65824916327023
通过结构数据对比标定参数,可知rotation误差基本在0.3度以内,translation误差在3mm左右。
















 1113
1113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









