






最近比较忙,事情比较多,所以这一周没怎么更新。上篇主要写了DLT目标跟踪算法,今天这篇主要写写基于全卷积网络跟踪器算法——FCNT跟踪算法。
1.什么是FCNT跟踪算法
FCNT跟踪算法主要利用现有大规模分类数据集预训练的CNN分类网络提取特征,主要对VGG-16的Conv4-3和Conv5-3层输出的特征图谱进行了分析。
2.FCNT跟踪算法的原理
FCNT跟踪算法主要包括以下步骤:
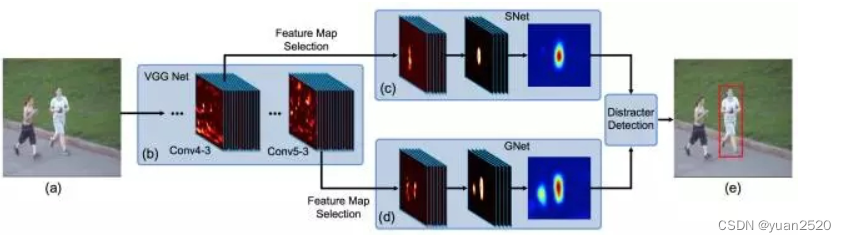
(1)输入的视频帧,
(2)利用 VGG-19提取feature,
(3)分别利用高层的特征,传送给 SNet 以及 GNet,
(4)分别对这两个特征图进行映射,
(5)建立干扰性判别器,选择其中的一个 heap map 作为最终的输出,
(6)当下一帧到来后,以上一帧预测结果为中心划出一块区域,
(7)然后分别输入GNet和SNet,得到两个预测的热图,
(8)最后根据是否有干扰器决定使用哪个热图生成最终的跟踪结果。
其框架可以表示为:
3.FCNT跟踪算法的优缺点
优点:该算法可以有效抑制干扰器,有效防止跟踪器漂移,对目标本身的形变更加鲁棒。
缺点:实测鲁棒性不高。















 7675
7675











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









