






上一篇写完了Camera标定,今天这篇文章写写lidar标定。
1.什么是lidar标定
lidar标定是指lidar坐标系与车载坐标系之间的标定,实质是建立lidar与车辆的空间位置关联。lidar通过发射、接收电磁波 信号获取环境信息,并输出lidar坐标系下的原始数据。
2.lidar坐标系
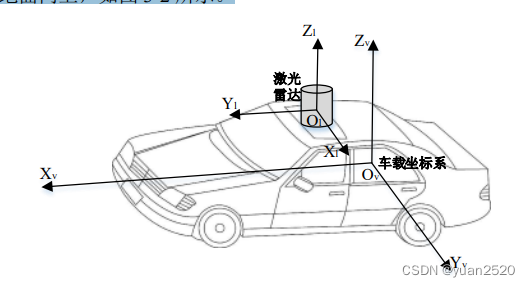
lidar通常安装在车顶位置,其与车辆之间的相对姿态和位置是固定不变的。lidar坐标系原点位于雷达中心,X 轴正方向与车载坐标系 Y 轴正方向一致,Y 轴方向与车载坐标系 X 轴正方向一致,Z 轴方向垂直于地面向上,可以用下图表示:
3. lidar标定原理
lidar坐标系与车载坐标系的变换关系可通过旋转矩阵和平移矩阵来实现,计算公式如下:
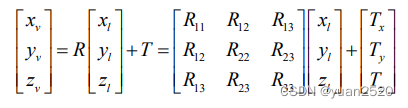
T是雷达坐标系原点在车载坐标系下的坐标矢量。标定过程就是求解旋转矩阵R和平移矩阵T的过程。

















 896
896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









