






1.车载摄像头的组成
昨天上海新增了3千多例,今天开始了“鸳鸯锅”封锁模式,早上看到的时候挺心酸的,祝愿ta们能早点康复,也希望能疫情能早点结束。OK,言归正传,车载摄像头主要有:镜头、滤色片、图像COMS传感芯片、数据处理线路板基板等组成。镜头主要的作用时聚集光线,把景物投射到成像介质表面,有的是单镜头,有的成像效果要好,需要多层玻璃的镜头。滤色片的主要作用是增加了滤色片将多余的光波段过滤掉,使图像传感器能拍摄多人眼所见到的实际景物。图像COMS传感芯片的主要作用是即成像介质,将镜头投射到表面的图像(光信号)转换为电信号。数据处理线路板基板的主要作用是将图像传感器的电信号传输到后端。

2.摄像头的基本工作原理
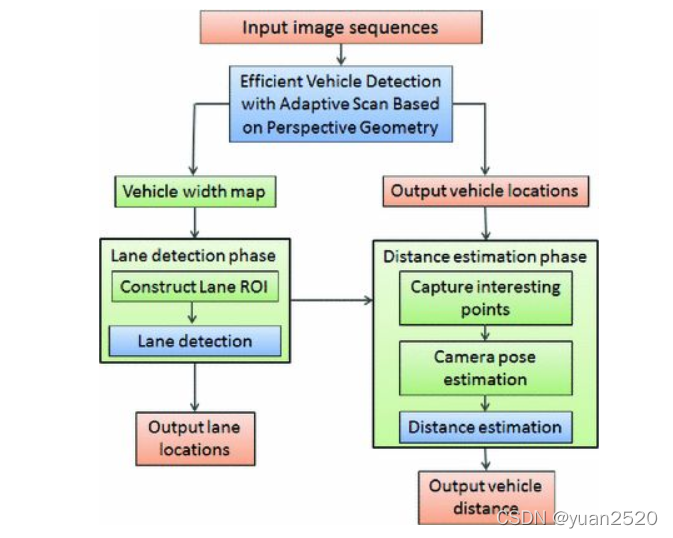
咱们简单说下车载摄像头的基本工作原理,各个厂家的车载摄像头基本主要是:
首先,进行图像输入,即输入摄像头的数据,以每帧信息为基础进行检测、分类、分割等计算,最后利用多帧信息进行目标跟踪,输出相关结果;
然后再进行预处理,预处理这块嘛,大致包括成帧、颜色调整、白平衡、对比度均衡、图像扭正等工作;
接着进行特征提取,在预处理的基础上提取出图像中的特征点;
最后,进行目标识别。即基于特征数据的输出,对图像中的物体进行识别分类 —— 人 ,车 、交通标志等,运用到机器学习、神经网络等算法。
3.摄像头的测距原理
摄像头的测距原理主要是基于几何关系的小孔成像测距,也是目前比较常见的测距方法。
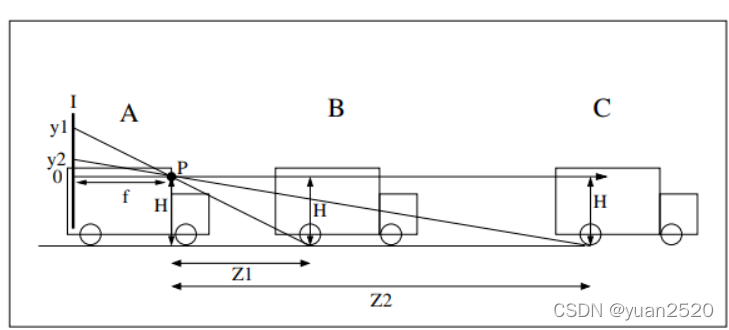
本车A,前方车B和C,摄像头P焦距f,高度H,和障碍物B/C距离Z1/Z2,B/C检测框着地点在图像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。
4.车载摄像头搭载方案介绍
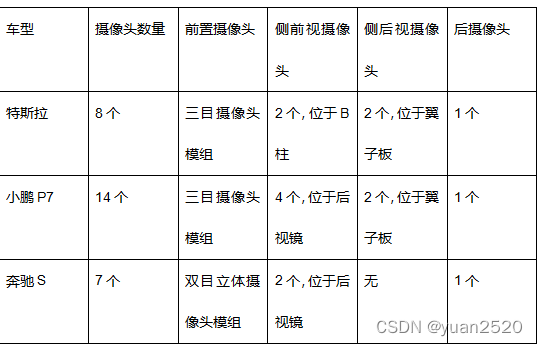
特斯拉:特斯拉的 Autopilot 系统搭载了 8 个摄像头,其中前方摄像头模组共由 3 个摄像头组成,这 3 个摄像头都是基于 2015 年安森美半导体公司发布的 120 万像素图像传感器开发的。
小鹏 :小鹏P7 搭载了 14 个摄像头,搭载最多摄像头的车型代表。
奔驰 :奔驰S 级搭载了 7 个摄像头,其中前方摄像头模组共由 2 个双目立体摄像头组成,这 2 个摄像头的像素均为 1.3MP,其镜头光轴之间的距离大概在 22 - 25 cm 左右,探测的有效距离大约为 120 m,摄像头的视场角大约在 50° 左右,刷新频率在 10Hz 左右。

















 2095
2095

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









