







系列文章
FreeRTOS实时操作系统(二)任务创建与任务删除(HAL库)
FreeRTOS实时操作系统(五)进入临界区、任务调度器挂起与恢复
FreeRTOS实时操作系统(七)时间片调度及RTOS的滴答定时器
FreeRTOS实时操作系统(八)任务状态查询及时间统计函数
FreeRTOS实时操作系统(十五)Tickless低功耗模式
延时函数
1.vTaskDelay():相对延时,每次延时从该函数开始计算。
2.vTaskDelayUntil():绝对延时,将整个任务的运行周期看成一个整体,延时时间包括:任务主体运行时间+延时时间+其他抢占任务执行时间。所以适合用在需要按照一定频率运行的任务。但是即使是这样,当其他高优先级任务抢占且不能及时返回到我们这个任务时,就会出现一定的时间偏差。
实验测试:
void task1( void * pvParameters )
{
TickType_t xLastWakeTime;
xLastWakeTime=xTaskGetTickCount();
while(1)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_4);
vTaskDelayUntil(&xLastWakeTime,500);
}
}
队列
基础介绍
队列是任务到任务、任务到中断、中断到任务数据交流的一种机制(消息传递)
一般情况下,全局变量的数据无保护,导致数据不安全,当多个任务同时对该变量操作时,数据易受损。
当然,如果每次我们都采用临界区代码保护也可以,但是读写队列自带这样的操作,用起来简便
队列简介
在队列中可以存储数量有限、大小固定的数据。队列中的每一个数据叫做“队列项目”,队列能够存储“队列项目”的最大数量称为队列的长度,在创建队列时,指定队列长度以及队列项目的大小。
队列特点
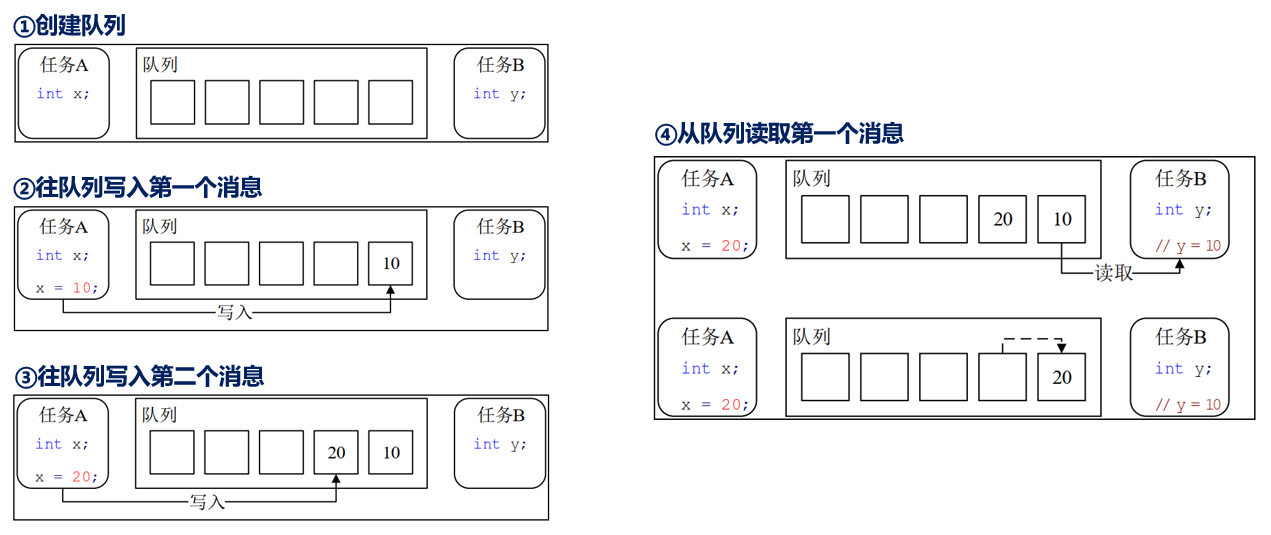
1.队列通常采用“先进先出”(FIFO)的数据存储缓冲机制,即先入队的数据会先从队列中被读取,FreeRTOS中也可以配置为“后进先出”LIFO方式;
2.FreeRTOS中队列采用实际值传递,即将数据拷贝到队列中进行传递, FreeRTOS采用拷贝数据传递,也可以传递指针,所以在传递较大的数据的时候采用指针传递
3.队列不属于某个任务,任何任务和中断都可以向队列发送/读取消息
4.当任务向一个队列发送消息时,可以指定一个阻塞时间,假设此时当队列已满无法入队:若:若阻塞时间为0,直接返回不会等待;若阻塞时间为0~port_MAX_DELAY,等待设定的阻塞时间,若在该时间内还无法入队,超时后直接返回不再等待;若阻塞时间为port_MAX_DELAY,死等,一直等到可以入队为止。出队阻塞与入队阻塞类似;
阻塞情况
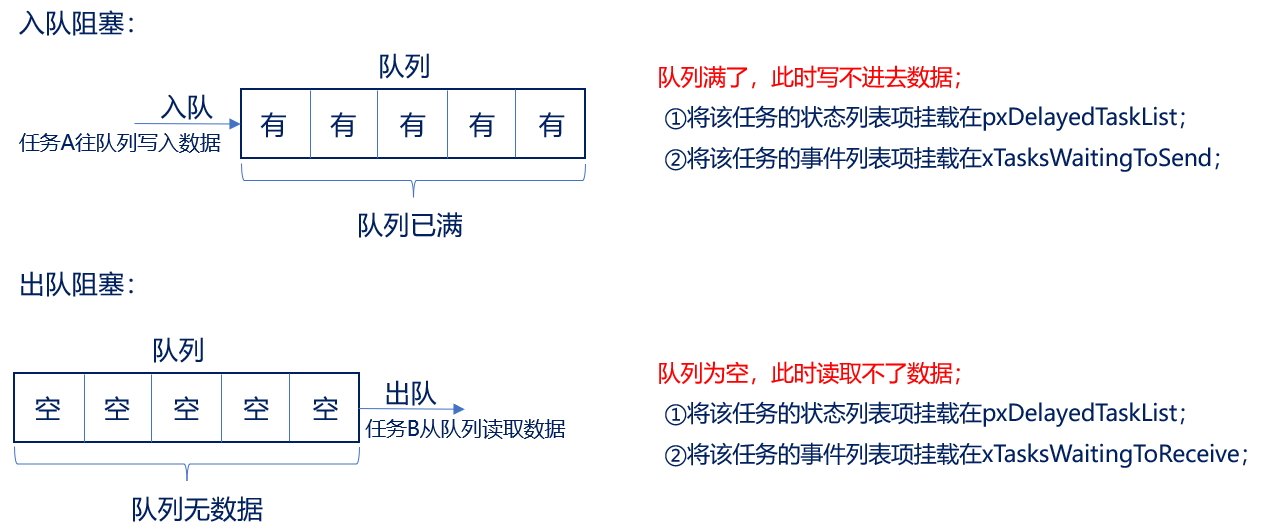
当多个任务写入消息给一个“满队列”时,这些任务都会进入阻塞状态,也就是说有多个任务在等待同一 个队列的空间,当空间空出的时候,优先级最高的任务或优先级相同,等待时间最久的任务会进入就绪态。
运行情况
结构体及API函数
队列的结构体
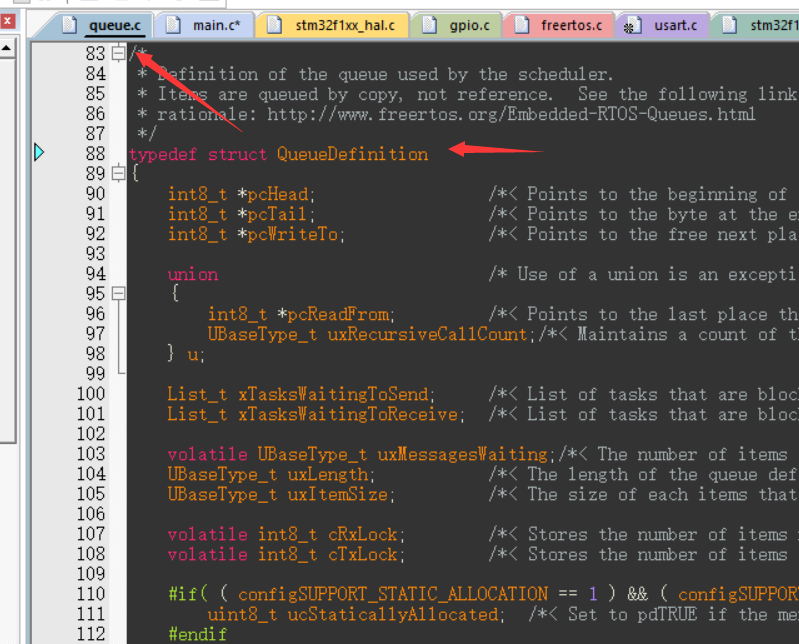
typedef struct QueueDefinition
{
int8_t * pcHead /* 存储区域的起始地址 */
int8_t * pcWriteTo; /* 下一个写入的位置 */
.....
List_t xTasksWaitingToSend; /* 等待发送列表 */
List_t xTasksWaitingToReceive; /* 等待接收列表 */
volatile UBaseType_t uxMessagesWaiting; /* 非空闲队列项目的数量 */
UBaseType_t uxLength; /* 队列长度 */
UBaseType_t uxItemSize; /* 队列项目的大小 */
volatile int8_t cRxLock; /* 读取上锁计数器 */
volatile int8_t cTxLock; /* 写入上锁计数器 */
.......
API函数
一般要用到创建队列、写队列、读队列这几种
创建队列
xQueueCreate() :动态方式创建队列
xQueueCreateStatic() :静态方式创建队列
区别:队列所需的内存空间由 FreeRTOS 从 FreeRTOS 管理的堆中分配,而静态创建需要用户自行分配内存。
动态创建队列:
#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
#define xQueueCreate( uxQueueLength, uxItemSize ) xQueueGenericCreate( ( uxQueueLength ), ( uxItemSize ), ( queueQUEUE_TYPE_BASE ) )
#endif
参数:uxQueueLength:队列长度;uxItemSize :队列项目大小;
返回值:NULL:队列创建失败;其他:队列创建成功,返回任务句柄;
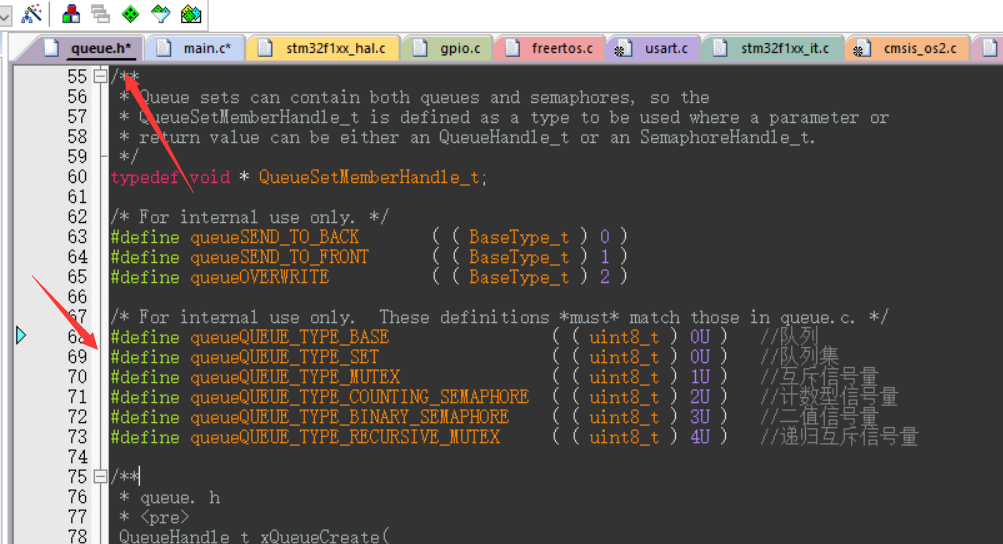
FreeRTOS 基于队列实现了多种功能,每一种功能对应一种队列类型:
/* For internal use only. These definitions *must* match those in queue.c. */
#define queueQUEUE_TYPE_BASE ( ( uint8_t ) 0U ) //队列
#define queueQUEUE_TYPE_SET ( ( uint8_t ) 0U ) //队列集
#define queueQUEUE_TYPE_MUTEX ( ( uint8_t ) 1U ) //互斥信号量
#define queueQUEUE_TYPE_COUNTING_SEMAPHORE ( ( uint8_t ) 2U ) //计数型信号量
#define queueQUEUE_TYPE_BINARY_SEMAPHORE ( ( uint8_t ) 3U ) //二值信号量
#define queueQUEUE_TYPE_RECURSIVE_MUTEX ( ( uint8_t ) 4U ) //递归互斥信号量
写入队列
| 函数 | 描述 |
|---|---|
| xQueueSend() | 往队列的尾部写入消息 |
| xQueueSendToBack() | 同 xQueueSend() |
| xQueueSendToFront() | 往队列的头部写入消息 |
| xQueueOverwrite() | 覆写队列消息(只用于队列长度为 1 的情况) |
| xQueueSendFromISR() | 在中断中往队列的尾部写入消息 |
| xQueueSendToBackFromISR() | 同 xQueueSendFromISR() |
| xQueueSendToFrontFromISR() | 在中断中往队列的头部写入消息 |
| xQueueOverwriteFromISR() | 在中断中覆写队列消息(只用于队列长度为 1 的情况) |
由下图可知,这几个函数只是传入的参数不同,都调用了xQueueGenericSend()这个函数。
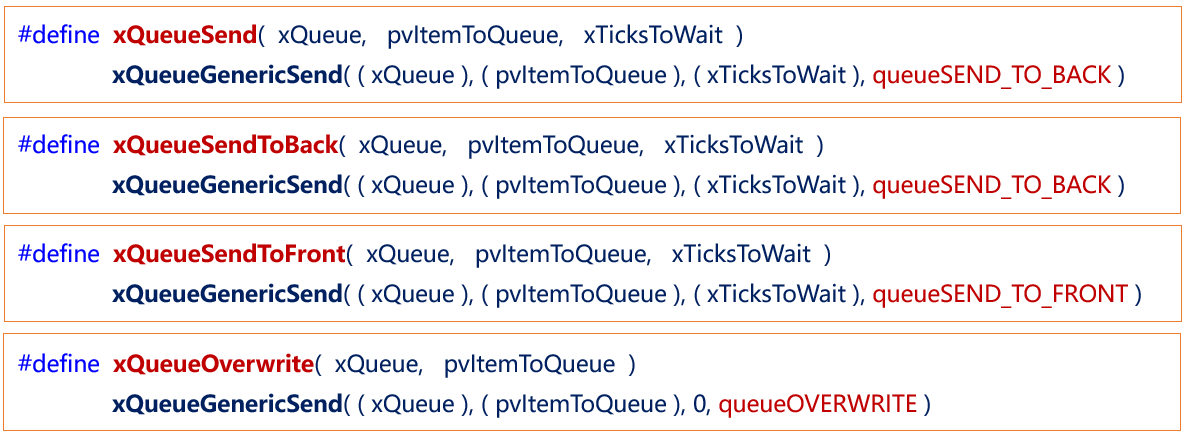
注意覆写队列只有在队列长度为1的时候,才能使用
/* For internal use only. */
#define queueSEND_TO_BACK ( ( BaseType_t ) 0 )
#define queueSEND_TO_FRONT ( ( BaseType_t ) 1 )
#define queueOVERWRITE ( ( BaseType_t ) 2 )
下面是内部函数xQueueGenericSend() 的实现:
BaseType_t xQueueGenericSend( QueueHandle_t xQueue, const void * const pvItemToQueue, TickType_t xTicksToWait, const BaseType_t xCopyPosition )
形参:xQueue:待写入队列;pvItemToQueue:待写入消息;xTicksToWait:阻塞超时时间;xCopyPosition:写入位置;
返回值:pdTRUE:队列写入成功;errQUEUE_FULL :队列写入失败
读取队列消息
| 函数 | 描述 |
|---|---|
| xQueueReceive() | 从队列头部读取消息,并删除消息 |
| xQueuePeek() | 从队列头部读取消息 |
| xQueueReceiveFromISR() | 在中断中从队列头部读取消息,并删除消息 |
| xQueuePeekFromISR() | 在中断中从队列头部读取消息 |
BaseType_t xQueueReceive( QueueHandle_t xQueue, void * const pvBuffer, TickType_t xTicksToWait )
此函数用于在任务中,从队列中读取消息,并且消息读取成功后,会将消息从队列中移除。
形参:xQueue:待读取的队列;pvBuffer:信号读取缓冲区;xTicksToWait:阻塞超时时间
返回值:pdTRUE:读取成功;pdFALSE:读取失败;
BaseType_t xQueuePeek( QueueHandle_t xQueue, void * const pvBuffer, TickType_t xTicksToWait )
此函数用于在任务中,从队列中读取消息, 但与函数 xQueueReceive()不同,此函数在成功读取消息后,并不会移除已读取的消息!
参数:xQueue:待读取的队列;pvBuffer:信号读取缓冲区;xTicksToWait:阻塞超时时间
返回值:pdTRUE:读取成功;pdFALSE:读取失败;
实验测试
#include "queue.h"
QueueHandle_t key_queue; /* 小数据句柄 */
QueueHandle_t big_date_queue; /* 大数据句柄 */
char buff[100] = {"我是一个大数组,大大的数组 124214 uhsidhaksjhdklsadhsaklj"};
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
TaskHandle_t task1_handler;
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 2
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
void vTaskCode( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
// Function that creates a task.
void vOtherFunction( void )
{
/* 队列的创建 */
key_queue = xQueueCreate( 2, sizeof(uint8_t) );
if(key_queue != NULL)
{
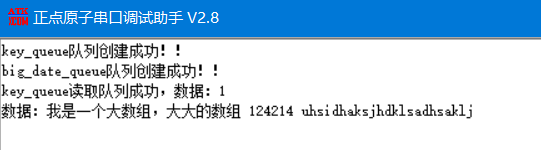
printf("key_queue队列创建成功!!\r\n");
}else printf("key_queue队列创建失败!!\r\n");
big_date_queue = xQueueCreate( 1, sizeof(char *) );
if(big_date_queue != NULL)
{
printf("big_date_queue队列创建成功!!\r\n");
}else printf("big_date_queue队列创建失败!!\r\n");
xTaskCreate( vTaskCode, "tak1", 128, NULL, 1, &task1_handler );
vTaskStartScheduler();
}
void task1( void * pvParameters )
{
BaseType_t err = 0;
uint8_t key=1;
char * buf;
buf = &buff[0];
err = xQueueSend( key_queue, &key, portMAX_DELAY );
if(err != pdTRUE)
{
printf("key_queue队列发送失败\r\n");
}
err = xQueueSend( big_date_queue, &buf, portMAX_DELAY );
if(err != pdTRUE)
{
printf("key_queue队列发送失败\r\n");
}
while(1)
{
vTaskDelay(100);
}
}
void task2( void * pvParameters )
{
BaseType_t err = 0;
uint8_t key = 0;
char * buf;
while(1)
{
err = xQueueReceive( key_queue,&key,portMAX_DELAY);
if(err != pdTRUE)
{
printf("key_queue队列读取失败\r\n");
}else
{
printf("key_queue读取队列成功,数据:%d\r\n",key);
}
err = xQueueReceive( big_date_queue,&buf,portMAX_DELAY);
if(err != pdTRUE)
{
printf("big_date_queue队列读取失败\r\n");
}else
{
printf("数据:%s\r\n",buf);
}
vTaskDelay(100);
}
}
这里回顾一下C语言的知识,学的太差了:
声明了一个指向char的指针buf,指向的是buff的首地址,在入队操作时,我们入的是这个指针的地址,不是这个指针。
char * buf;
buf = &buff[0];
err = xQueueSend( big_date_queue, &buf, portMAX_DELAY );
类似下面:
const char * str = "hello";
printf("%c\n",*str);//输出首字符
printf("%s\n",str);//输出整串字符
printf("%p\n",str);//输出字符串首字符地址
printf("%p\n",&str);//输出指针str的地址
所以str指向是字符串的首地址,解引用的时候也就是首字符
















 623
623











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









