







sprung mass: [车辆] 簧上质量
spring: 弹簧
damper: [车辆] 减震器
unsprung mass: 非簧载质量
tire: 轮胎
vehicle shock absorber (suspension): 车辆减振器(暂停,中止)
damping coefficient: [物] 阻尼系数
Inertia: 惯性原理
torsional force: 扭转力
Tire inertia: 轮胎惯性
Tire torsional stiffness: 轮胎扭转的刚度
Tire torsional damping: 轮胎扭转的阻尼
pitch: 倾斜度
roll: 翻滚
suspension: 暂停,中止
drivetrain: 动力传动系统
gradient resistance:上坡阻力
aerodynamic resistance:空气动力阻力
longitudinal motion:纵向运动
traction drive force:牵引力
rolling resistance:滚动阻力
inclined road:斜巷
friction forces:摩擦力
lateral forces:侧向力
Lateral motion:侧向运动
在上一课中, 我们进行了运动自行车模型 通过转向速率和速度输入捕捉车辆运动。 在本课中, 我们将进入动态建模。 开始考虑作用在车辆上的力和力矩。
这种类型的模型可以进行更高保真度的预测, 相比运动模型。 这种更高保真度 然而, 是以更高的计算复杂度为代价的。 因此, 运动学和动态模型在自动驾驶开发中都有其用途。 动态建模对你们很多人来说可能是非常熟悉的。
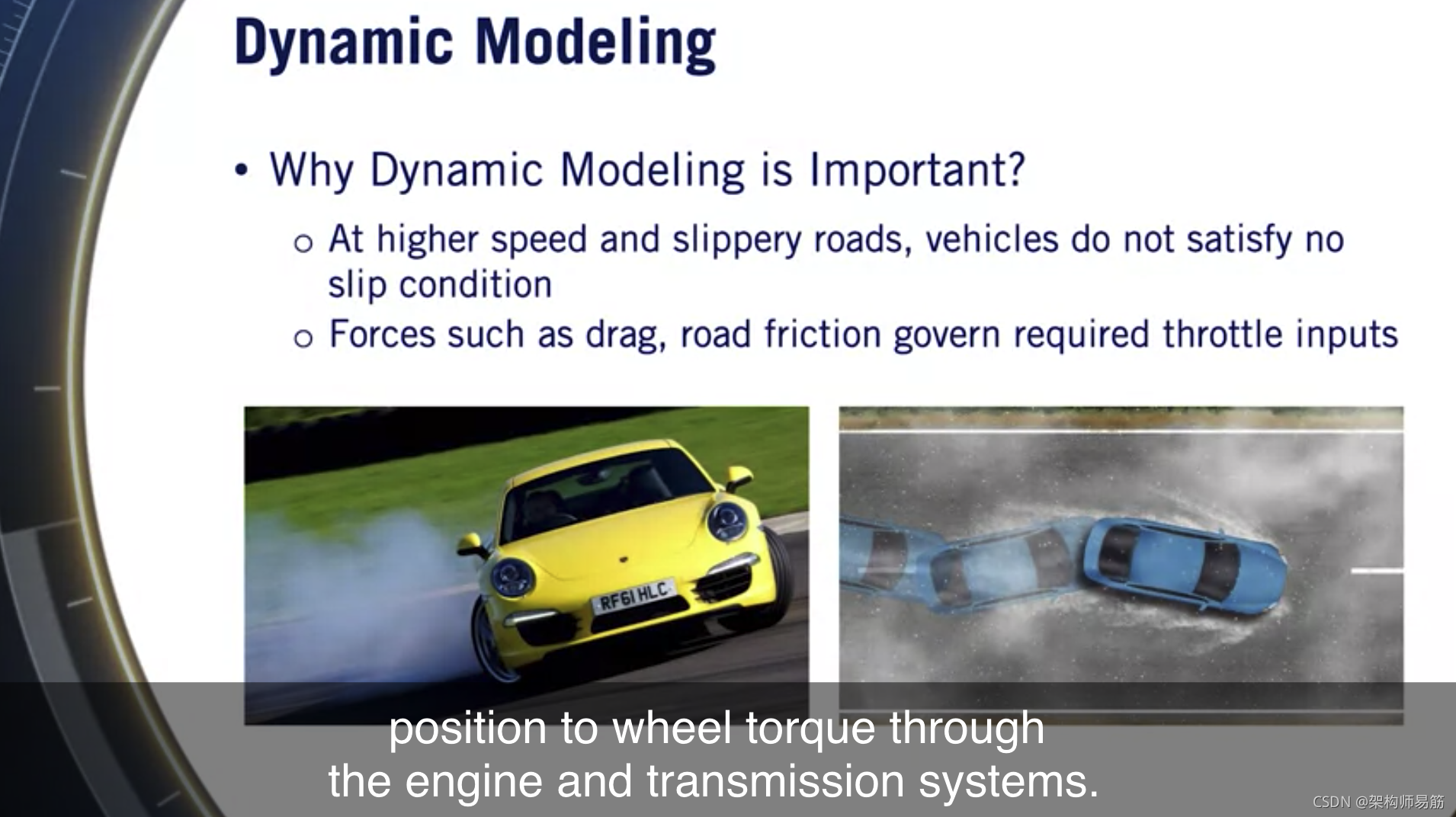
所以, 如果你喜欢画自由体受力图并 应用牛顿方程, 不要犹豫, 在课程中向前跳过。 如果您需要复习, 或 或者之前没有进行动态建模,这个介绍性视频适合您。 那么, 为什么我们需要动态建模呢? 在车辆建模中, 当车辆在移动, 以更高的速度转弯, 或者当道路很滑的时候, 无滑移条件定义的假设可能不再成立。 由于对车辆施加的力会导致轮胎滑过路面。 在滑移条件期间对力的平衡进行建模可以扩展 我们的模型使得仍然准确预测运动的一组驾驶条件。
此外,汽车中的许多子系统具有类似的条件,其中 硬运动约束未正确地捕获该子系统的演变,并且 那里也需要动态模型。 一个例子是传动系, 其中扭矩的平衡是需要捕捉从油门的连接 位置,通过发动机和传动系统来旋转扭矩。 通过明确地模拟作用在车辆上的瞬间力的平衡, 我们可以确定车辆所经历的加速度,并且 使用它们来模拟我们的车辆运动。
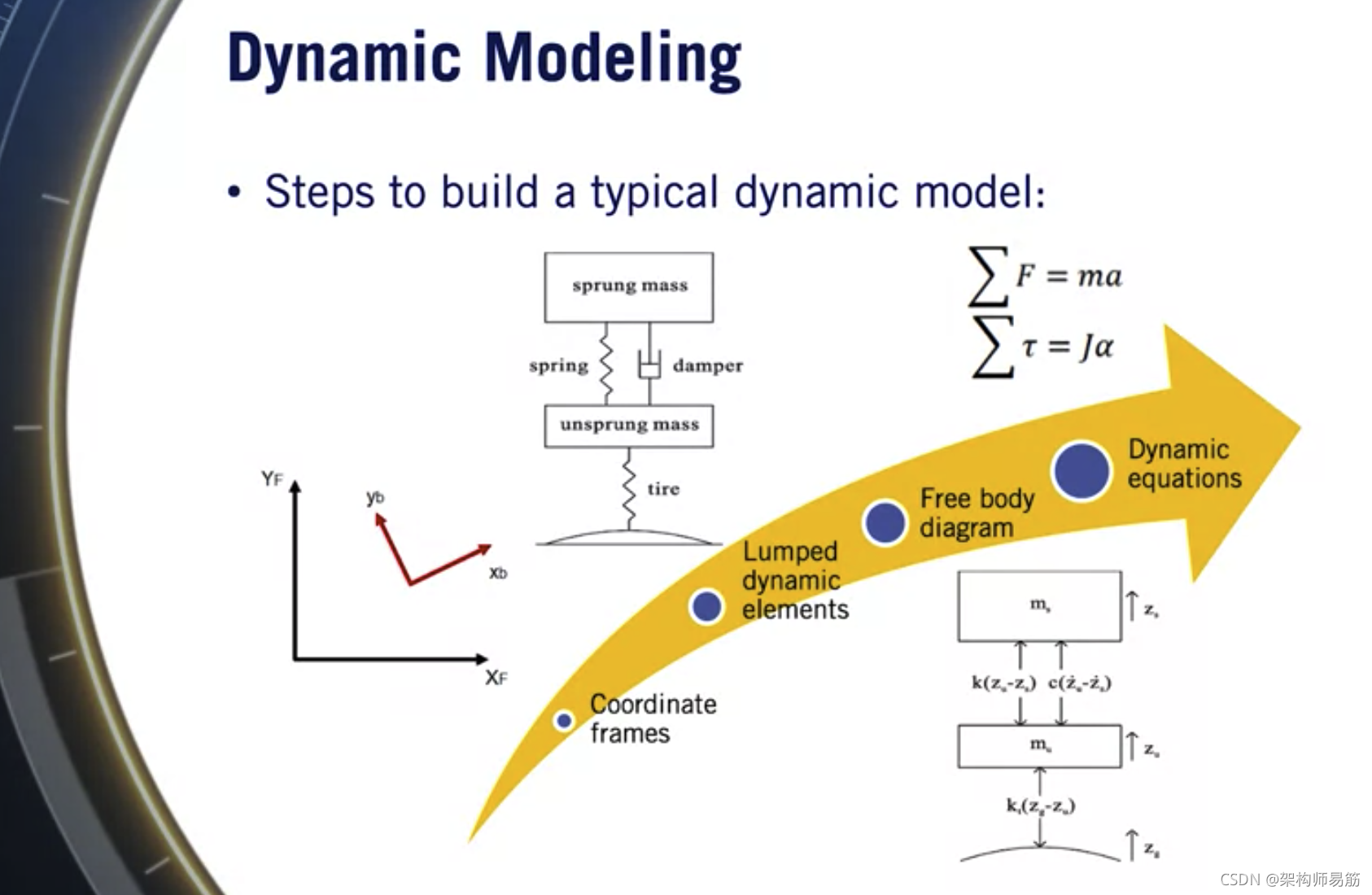
我们现在开始我们的任务, 定义动态建模过程 为刚体物体。 要构建一个典型的动态模型, 我们可以按照以下步骤操作。
首先, 我们要设置在模型中使用的坐标系。 例如, 我们之前讨论过的车身坐标系和惯性坐标系。
接下来, 我们将动态系统分解为动态元素。 这些元素将系统的潜在分布方面组合成 离散或集总元素。 在弹簧质量阻尼器的情况下, 集中的元素将是弹簧, 质量, 和阻尼器。
我们还为每个集总的元素定义了一个模型。 例如, 线性弹簧提供了与位移成比例的力, 为静态位置。
接下来, 我们在元素列表中绘制每个刚体的自由主体图。 并正确地命名和模拟所有作用于物体的力和力矩。
最后, 通过使用牛顿的第二定律, 我们编写了定义动态模型的数学方程, 将每个轴的所有力相加,用于平移动力学。 在每个旋转轴的所有时刻, 用于旋转动力学。
结果是常微分方程描述了 刚体运动,这是我们的动态模型。
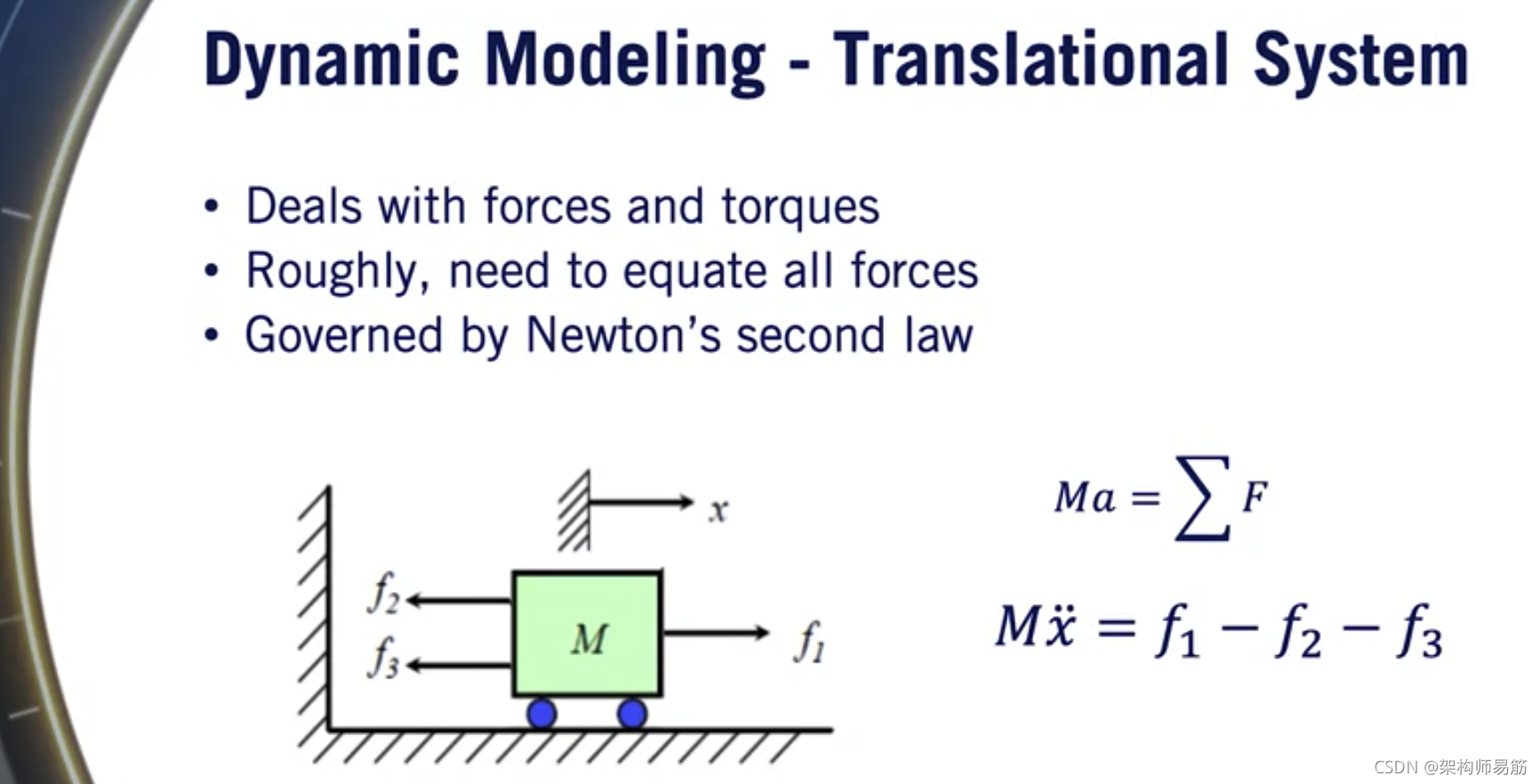
让我们按照我们的四个步骤的过程 进行一维平移系统,即滚动推车。
这个图显示了我们要跟踪的质量 m 的位置。
我们首先定义的坐标系 购物车的位置, 用 x 表示。
然后我们确定刚体,在这种情况下,是质量为m的推车。 接下来,我们绘制受力图 并定义作用在推车上的所有力。 这种情况下,有三个力作用在推车上, f1将推车拉向右侧,f2和f3将推车拉向左侧。
最后,我们在x方向上应用牛顿第二定律来形成动态模型。 所得到的描述推车运动的动力学方程是 在x方向,x二次求导(加速度)乘以M 等于 f1、f1 和 f1 的总和。 注意, f2 和 f23 有负符号, 因为他们指向负 x 方向。
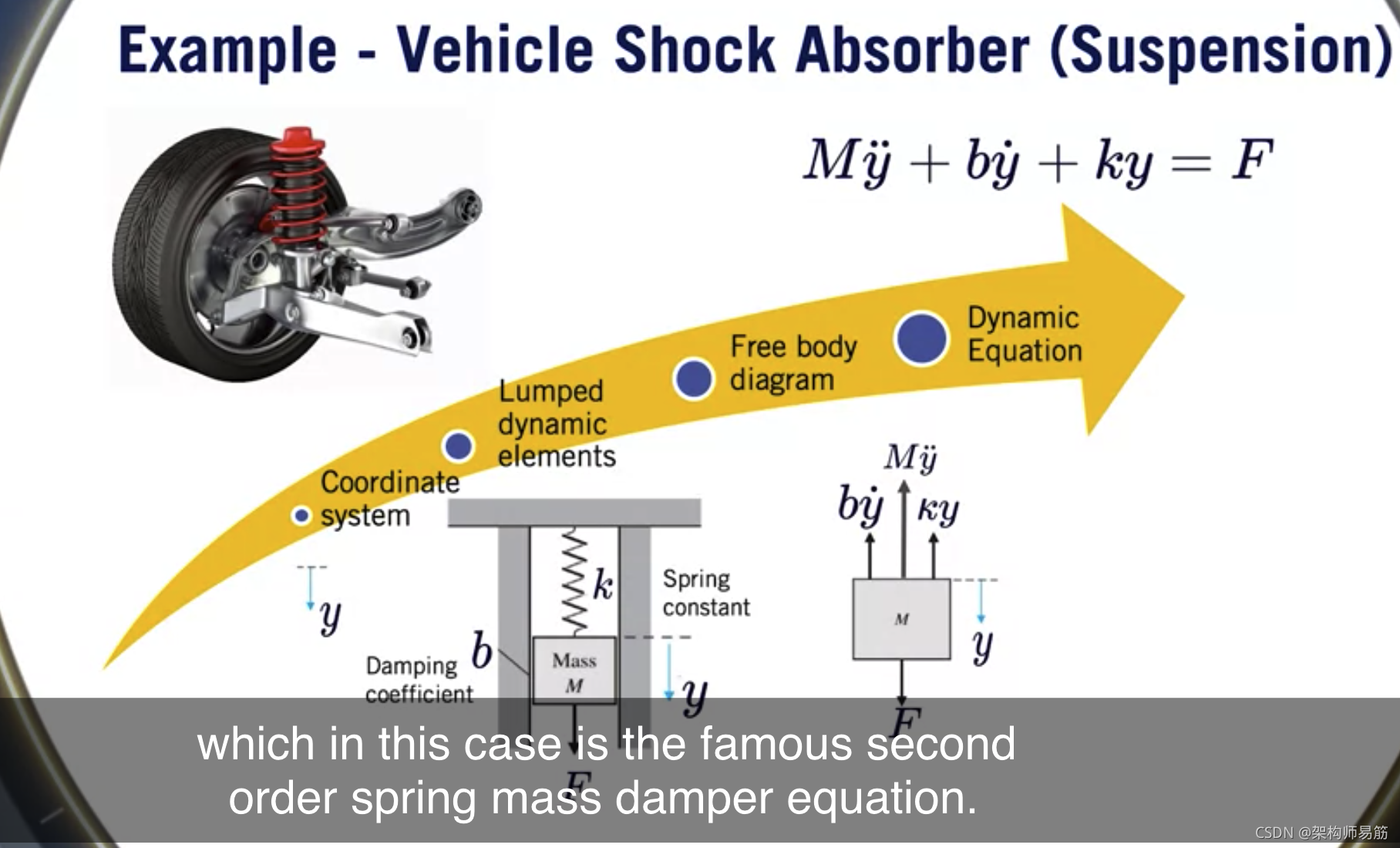
同样的过程也适用于汽车中的减震器 减震器的动态模型有助于工程师设计 和调整车辆悬架,以获得更好的乘坐舒适性和驾驶性能。
要对此组件进行建模, 我们可以通过我们在前面的幻灯片中介绍的四个步骤。 我们再次建立了坐标系, 在这种情况下, 它是垂直方向上的一个坐标 y。
确定性的刚体或块状动力元素。 在一个真正的物理系统的情况下, 存在块状元素的概念非常重要。 减震器依靠它的弹簧和 液压缸来限制流, 来吸收冲击。 我们将这个系统建模为三个独立的长元素 质量弹簧和液压缸或阻尼器。
我们使用线性弹簧和阻尼器模型, 其中弹簧抵抗位移在 y 和阻尼器能抵抗 y 速度。
第三步是绘制受力图。 通常我们显示的力或 扭矩以及速度和方向,在此图中。
最后, 我们得到了动力学方程, 在这种情况下, 这是著名的二阶弹簧质量阻尼器方程。
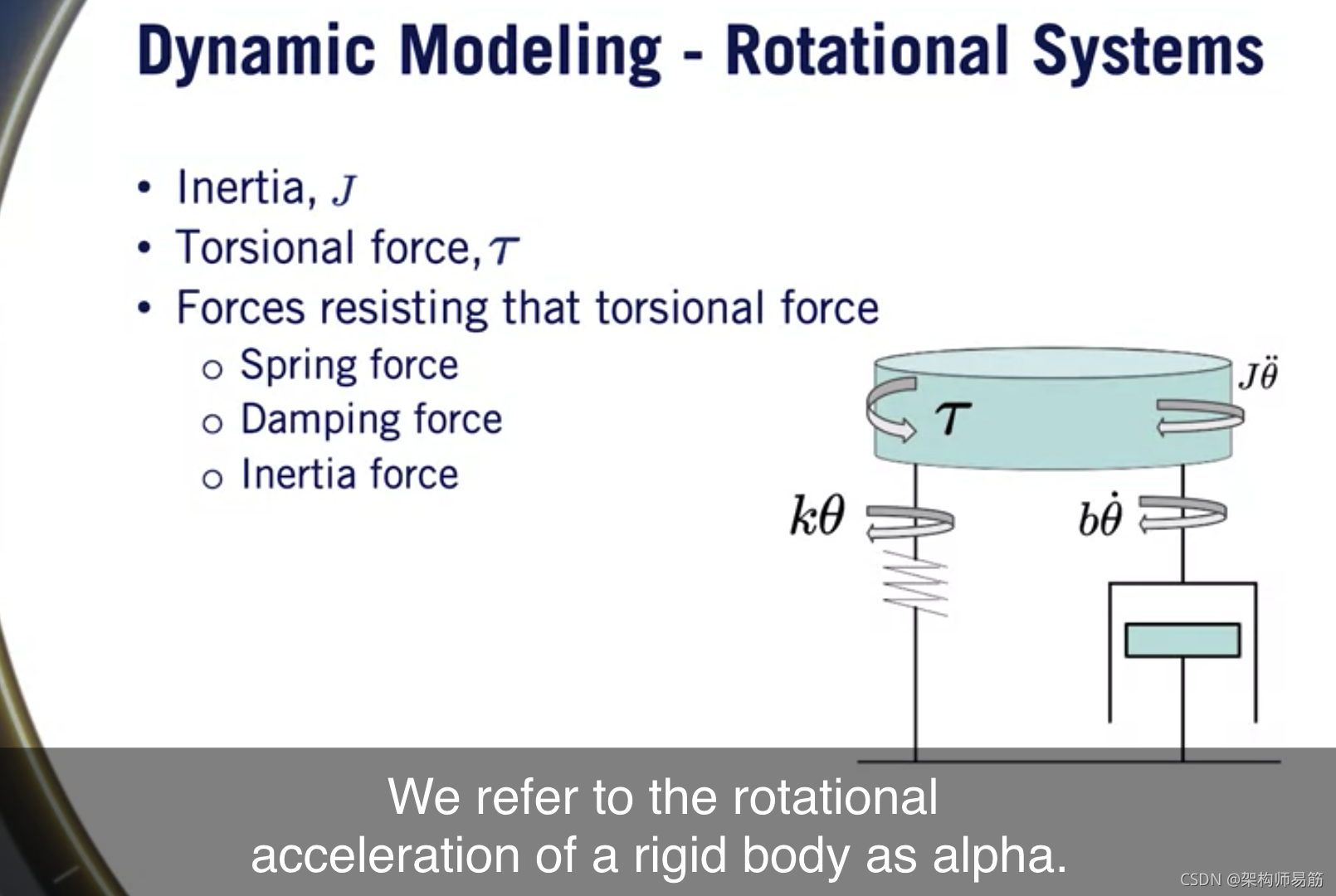
该过程没有变化来处理旋转或扭转系统。
旋转系统在汽车中是非常常见, 如 内燃机皮套,齿轮箱,[听不清]转换器和轮胎。
在旋转系统中, 我们总结[听不清]每次旋转和块的访问。 惯性是 J, 扭转弹簧和 阻尼器的方式与平移情况相同。
我们将刚体的旋转加速度称为 α。
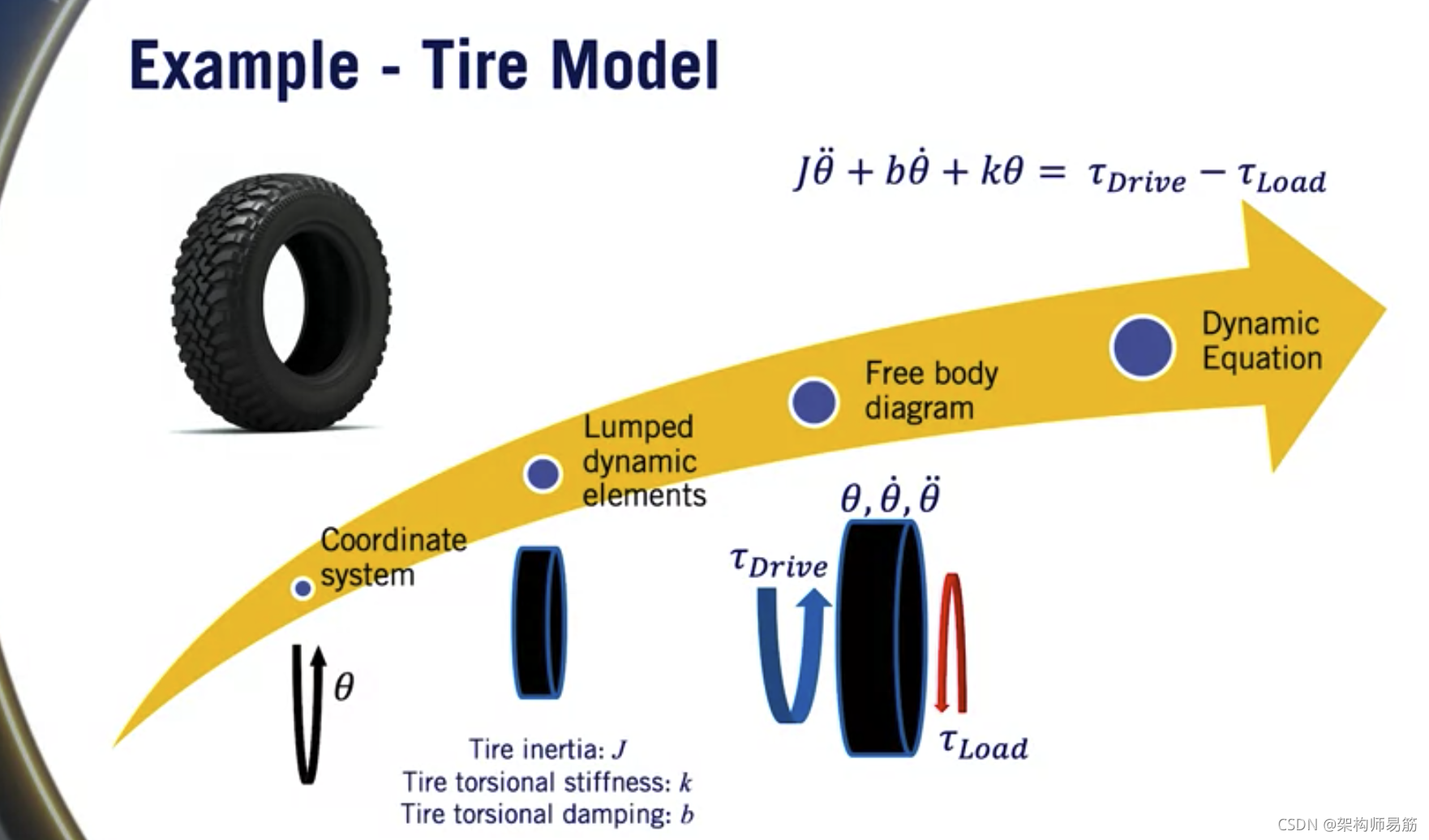
让我们模拟车轮的旋转动力学 用我们的四步建模过程。 首先, 我们建立了坐标系。 旋转方向上的一个坐标足以表示车轮的运动。
我们将θ定义为车轮的角位置,以θ一次求导 为旋转速度,θ为二次求导,为角加速度。
接下来, 我们形成了集成的动态元素。
轮胎模轮胎模型由于其旋转质量而具有转动惯量J。 扭转刚度k和 阻尼b,由轮毂中轮胎的材料特性决定。
我们驱动轮子,通过来自车辆驱动轴的驱动扭矩, 并通过来自轮胎与道路表面的相互作用的负载扭矩来抵抗这一点。
现在我们绘制受力图。 驱动扭矩和低扭矩被限定在相反的方向上, 当负载抵抗驱动扭矩的车轮加速度时
我们现在可以得到车轮系统的动态模型。
驱动扭矩和负载扭矩之间的差异 限定了作用在车轮上的净扭矩。 而旋转弹簧和 块状元件模型中的阻尼器抵抗加速度。 最终的动态模型描述了车轮位置的变化, 当受到这个净扭矩时。
车辆的动态模型对于多种应用是有用的。 它们可用于改进状态估计方法 当融合传感器数据以跟踪运动时。 它们可用于帮助控制器设计, 以跟踪所需的 轨迹或路径。
他们还可以帮助自驾游工程师确定车辆性能的极限 以避免规划汽车无法跟踪的不安全轨迹。
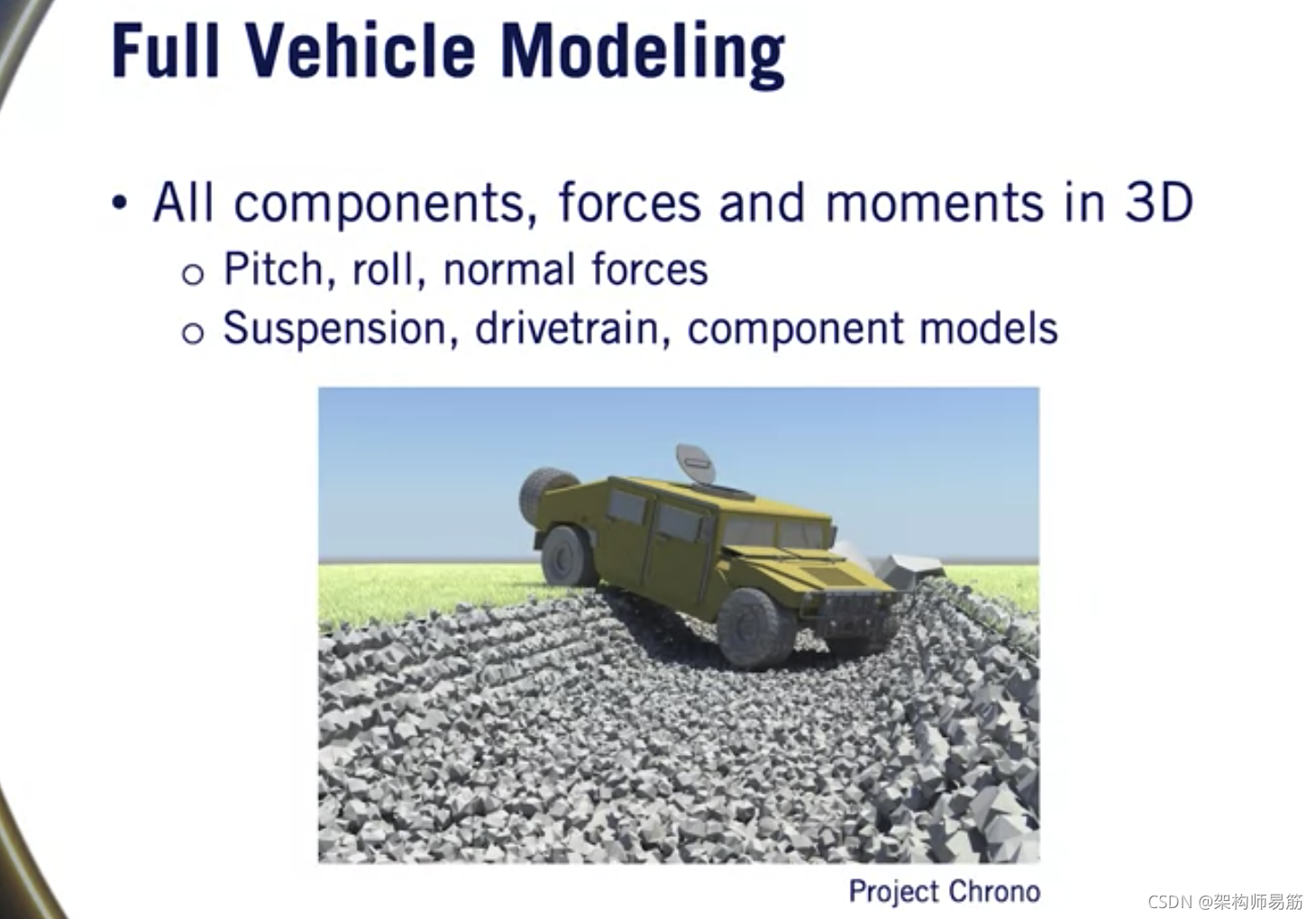
然而, 一个完整的三维模型的车辆, 考虑到车身侧倾和俯仰, 任意倾斜的道路,以及每个轮胎的不同力和 力矩都构成了一个非常复杂的模型。
相反, 可以将我们的模型分成两个2D 模型, 从而将我们的模型分为 转向控制和油门和制动控制问题。
全3D 车辆建模是一个非常吸引力的方向。 如果您愿意, 我们在补充材料中引入了一些链接 用以了解更多信息。
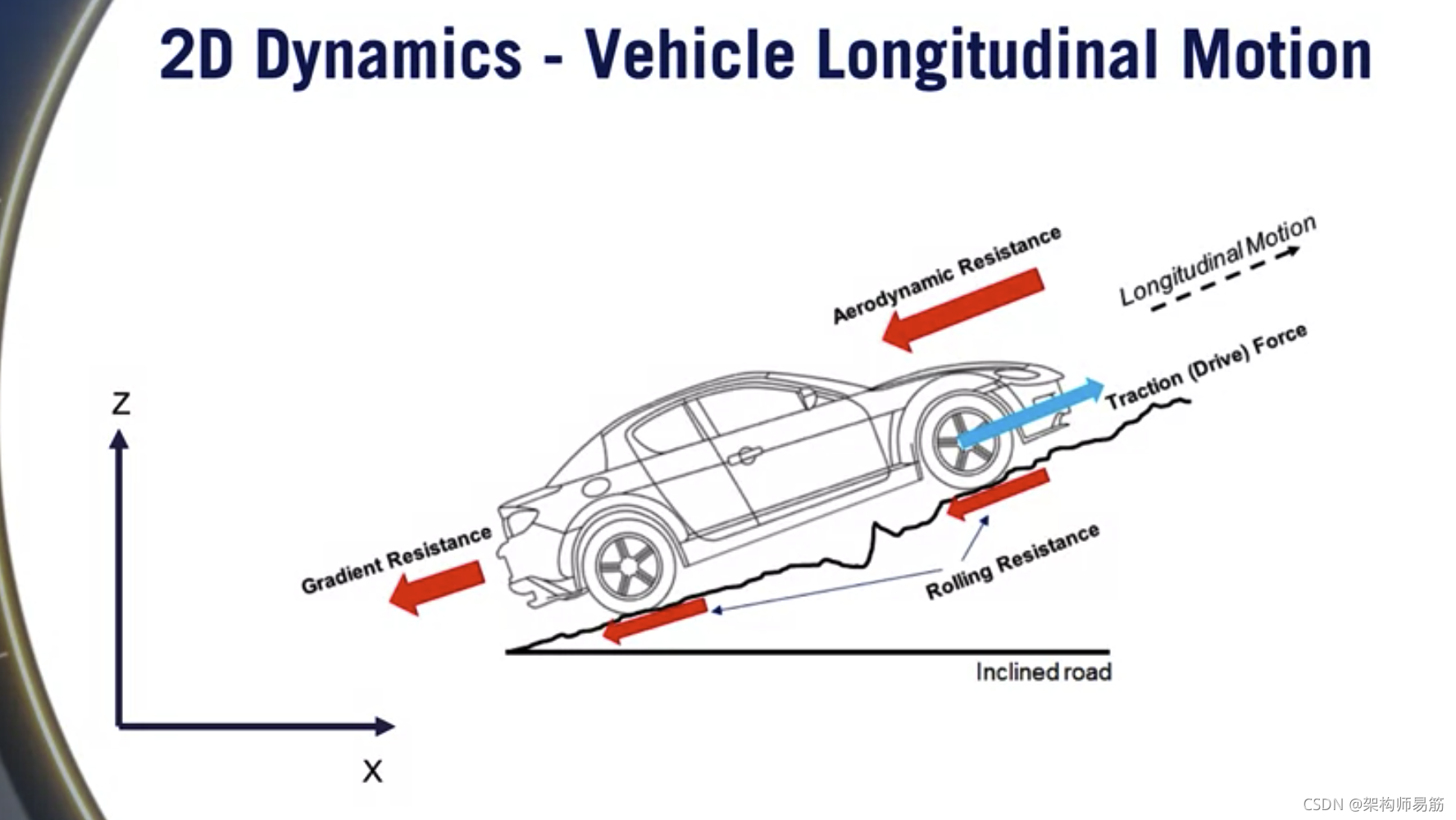
由于这些原因, 我们将建立一个单独的纵向和 横向动力学模型,为我们的自动驾驶汽车。 纵向模型考虑了在倾斜道路上行驶的车辆。
我们将车辆运动限制在 XZ 平面上。 有几种力作用在车身和 轮胎上,包括牵引力,滚动阻力, 气动力和重力引起的梯度阻力。 在下一个视频中,我们将对纵向车辆动力学模型 进行了更详细的讲解
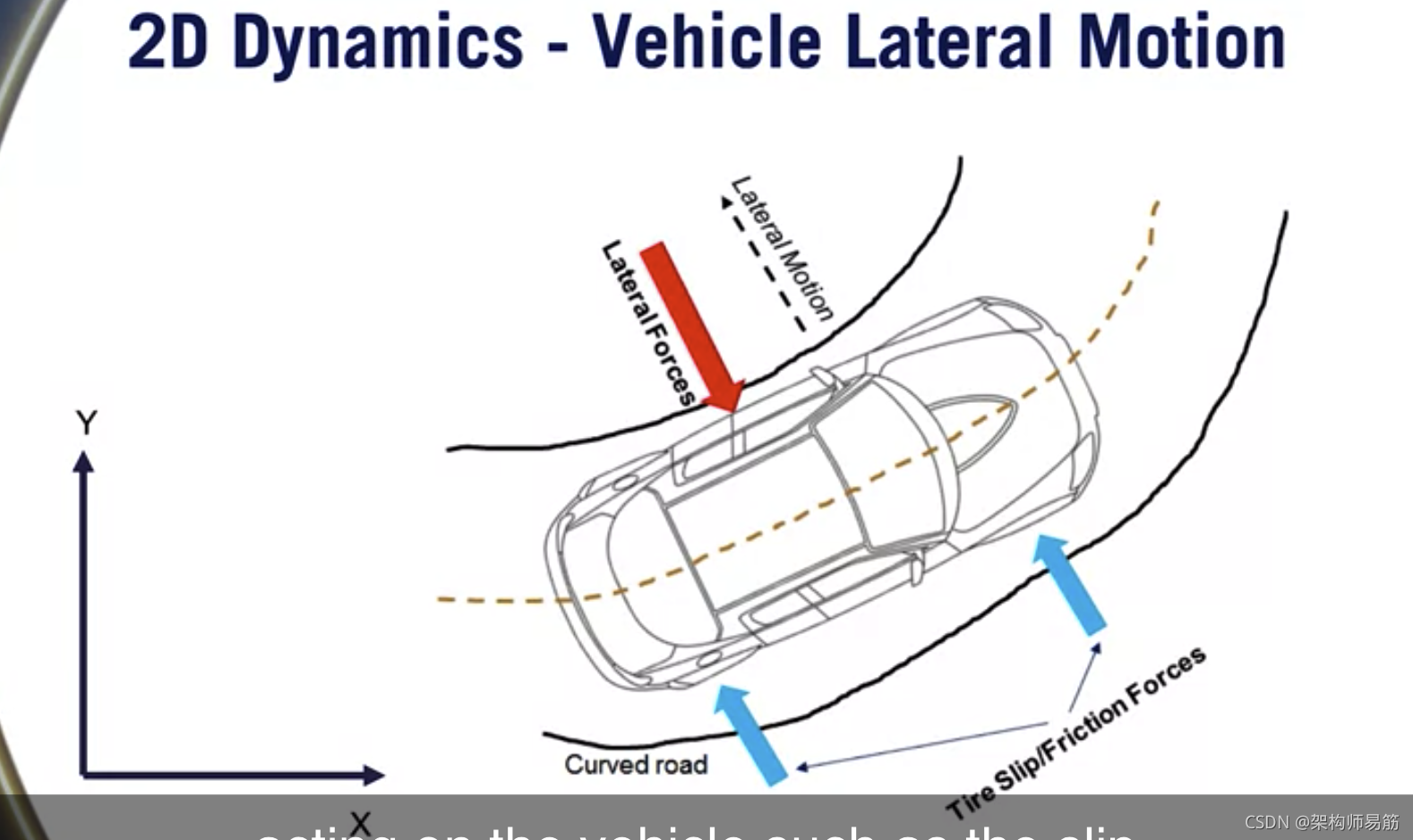
类似地, 横向车辆动力学模型, 可以从 xy 平面上的运动中发展出来。 从上到下看或鸟瞰。
在这个二维模型中, 侧向也有几种力 作用于车辆, 如滑移力和离心力, 这个话题将在未来的课程中讨论。在本视频 我们介绍了二维动态模型的基本内容, 并将其应用于服务器和车轮子系统。 这些模型有助于确定这些系统如何随时间演变。
下一课中,我们将介绍车辆纵向动力学。 并研究为驱动轮提供调整的传动系统组件。 下一节课见。
第 3 课补充阅读:3D 中的动态建模
补充阅读:3D 动态建模
在下面的教科书和链接中阅读有关动力学和车辆动力学基础知识的更多信息:
通用动力:
Ardema, Mark D. Newton-Euler Dynamics , Springer: Santa Clara University, Santa Clara (2005)。
车辆建模:
拉贾马尼,拉杰什。车辆动力学和控制, Springer Science & Business Media (2011)。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/yNa0v/lesson-3-dynamic-modeling-in-2d














 8557
8557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









