







 本文详细介绍了一种基于ET1100与STM32的EtherCAT从站硬件设计方案,包括核心板与底板的电路设计,以及通过SPI总线实现的数据交换。设计中包含了16路拨码开关输入与16路LED输出,用于验证EtherCAT通讯效果。
本文详细介绍了一种基于ET1100与STM32的EtherCAT从站硬件设计方案,包括核心板与底板的电路设计,以及通过SPI总线实现的数据交换。设计中包含了16路拨码开关输入与16路LED输出,用于验证EtherCAT通讯效果。
EtherCAT从站硬件设计框架【EtherCAT设计篇】一、EtherCAT从站硬件分析所示,采用ET1100+STM32方案。这里采用ET1100核心板+STM32底板两块板子方式,这样一来方便ET1100用于其他地方,二来方便更换不同方案(STM32/DSP)的底板,以扩展应用范围。
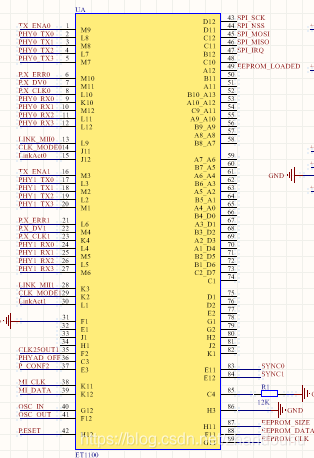
1、ET1100核心板
ET1100核心板主要参考《工业以太网现场总线EtherCAT驱动程序设计及应用》书籍及网上搜索的资料进行电路设计,主要包括:
1)ET100外围配置电路连接:这里采用SPI接口与STM32底板通讯。
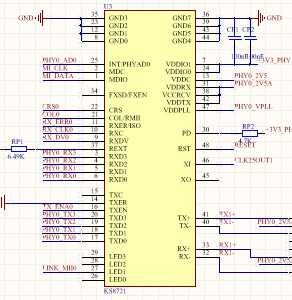
2)基于PHY器件KS8721的MII接线
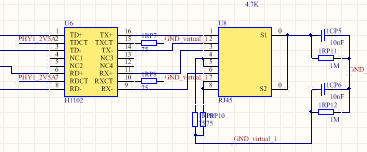
3)H1102隔离变压芯片及外围配置电路等
2、STM32底板
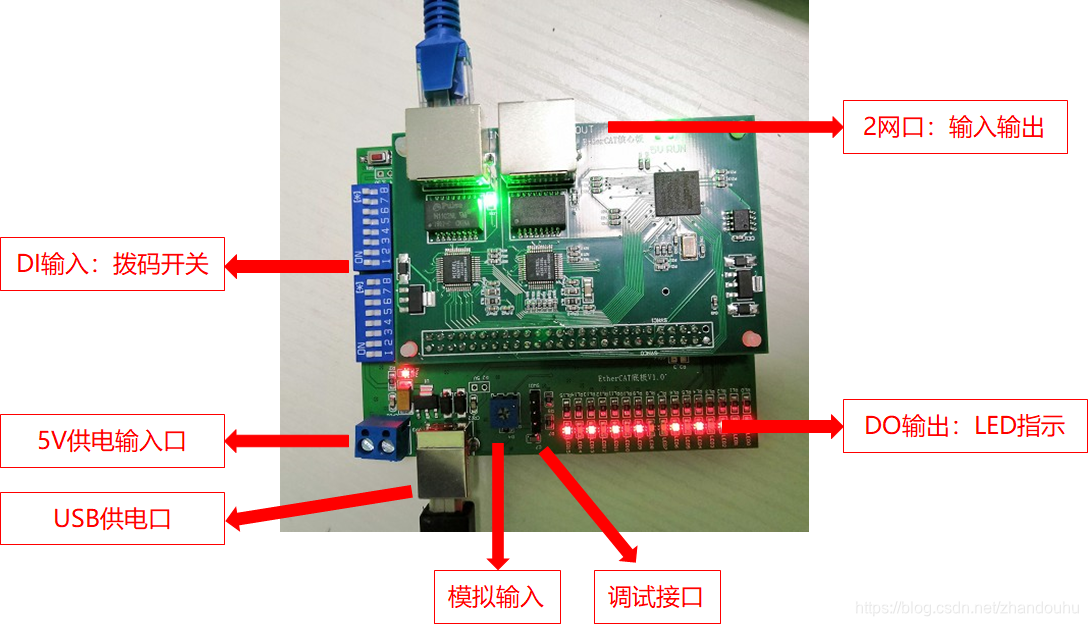
STM32底板用于实现与ET1100数据交换,这里采用SPI总线方式。此外,为验证EtherCAT通讯效果,输入上设计了16路拨码开关输入,一路滑动变阻器模拟输入;输出设计16路LED输出。
1)STM32最小系统:

2)系统电源输入及处理

3、EtherCAT从站硬件效果图
进行PCB打样制作实物,最终效果图如下:

















 1978
1978

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









