







 本文深入探讨了仿生机器人的核心知识,包括控制算法如PID和ZMP,执行器设计,传感器技术如陀螺仪和IMU,以及多足机器人的步态控制,特别是六足昆虫的三角步态。此外,还介绍了STM32F103的固件库开发,伺服系统,以及锂电池和2.4G无线通信的应用。
本文深入探讨了仿生机器人的核心知识,包括控制算法如PID和ZMP,执行器设计,传感器技术如陀螺仪和IMU,以及多足机器人的步态控制,特别是六足昆虫的三角步态。此外,还介绍了STM32F103的固件库开发,伺服系统,以及锂电池和2.4G无线通信的应用。
仿生机器人最核心的是模仿行为。
机器人控制算法
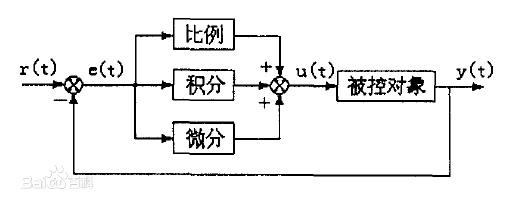
PID控制(比例积分微分控制)
根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控制对象进行控制。
ZMP零力矩点
判定仿人机器人动态稳定运动的重要指标,ZMP落在脚掌范围内,则机器人可以稳定的行走
执行器设计
机械传动的主要传动连接方式有四种:直接连接、齿轮连接、输送带连接和丝杠传动连接。
步骤
1.选择传动连接形式,确定转动惯量(一个物体对于旋转运动的惯性,用于建立角动量、角速度、力矩和角加速度等数个量之间的关系。)
2.确定运动方程式和运动轨迹曲线
3.计算选择合适的电机和驱动功率单元
陀螺仪(角速度传感器)
质点对固定点的角动量对时间的微商,等于作用于该质点上的力对该点的力矩。
对一固定点,质点所受的合外力矩为零,则此质点的角动量矢量保持不变。
通俗的来讲,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
单轴的角速度传感器只能测量单一方向的改变,一般的系统需要三轴传感器。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











