






1.在工程包文件里面创建lib文件夹并将动态链接库放在里面,建议命名为lib(name).so形式
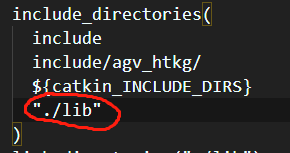
2.在CMakeLists.txt文件里include_directories()添加“./lib”,如下图所示
3.在CMakeLists.txt文件link_directories()添加 "./lib"如:link_directories("./lib"),注意:此项必须放在ADD_EXECUTABLE之前。
4.在需要关联动态链接库的结点后面添加动态链接库
TARGET_LINK_LIBRARIES(test_node ${catkin_LIBRARIES} ${libpcap_LIBRARIES} (name))

特别提醒:如果在类中引用需要关联的动态链接库,则在每一个引用该类的结点后面都要执行步骤4的操作















 2378
2378











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









