






基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。
1.依据PMSM的数学模型搭建电机模型
2.双闭环dq解耦控制,转速外环,转矩内环
3. EKF算法对电机的转子电角度和机械转速进行估算
ID:2465668485383219
专业电机控制
基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型
引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因具有高效、高功率密度、高可靠性等特点,被广泛应用于工业自动化、电动汽车等领域。传统的PMSM控制方法需要机械传感器来获得电机的转子位置和速度信息,但传感器安装成本高、易受环境干扰等问题限制了其在应用中的推广。为了解决这一问题,近年来,基于扩展卡尔曼滤波(Extended Kalman Filter, EKF)的无传感器控制方法得到了广泛研究和应用。
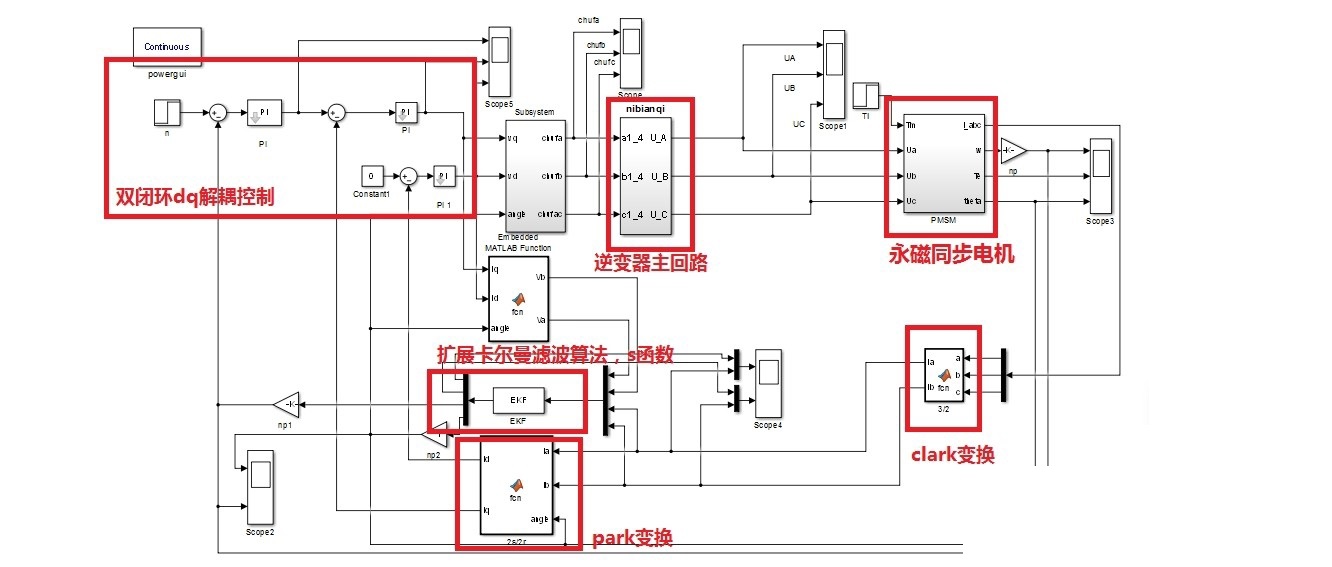
本文基于EKF扩展卡尔曼滤波算法,搭建了永磁同步电机PMSM的无传感器矢量控制Simulink仿真模型。具体包括以下几个部分:依据PMSM的数学模型搭建电机模型、双闭环dq解耦控制、转速外环和转矩内环以及EKF算法对电机的转子电角度和机械转速进行估算。
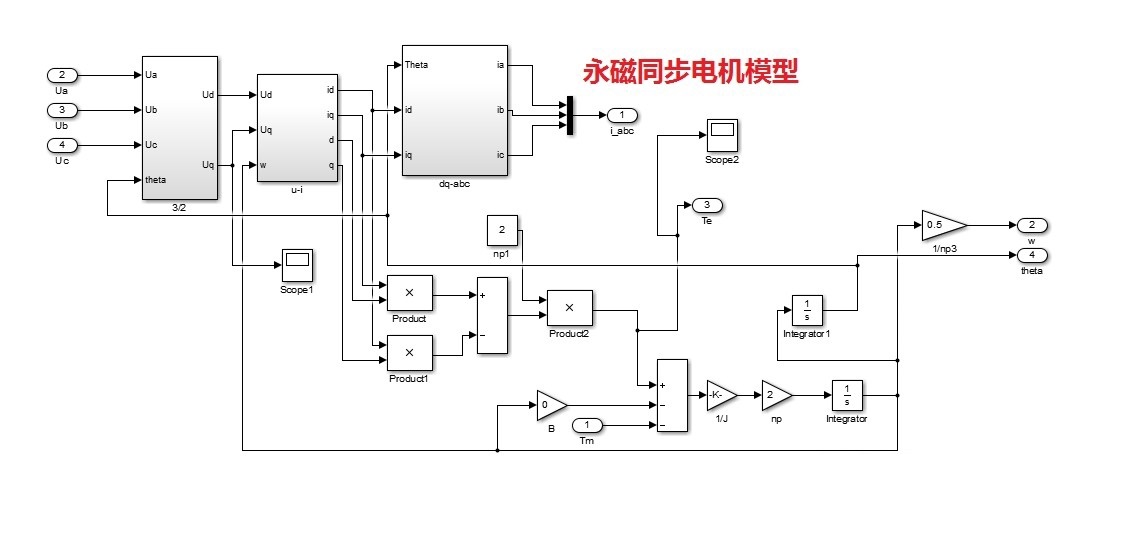
- 依据PMSM的数学模型搭建电机模型
在PMSM无传感器控制中,首先需要搭建电机模型。根据PMSM的数学模型,我们可以得到其dq坐标系下的电流动态方程和电动势方程。通过建立Simulink模型,将这些方程转化为仿真模型中的数学表达式,从而实现对PMSM的建模。
- 双闭环dq解耦控制,转速外环,转矩内环
为了实现电机的精确控制,我们采用了双闭环dq解耦控制策略。其中,dq解耦可以将PMSM的电流控制分解为独立的转矩和磁链控制。转速外环使用PI控制器,通过对电机的转速进行调节,使其跟踪给定的转速指令。转矩内环使用PI控制器,通过对电机的电流进行调节,以实现对电机转矩的精确控制。
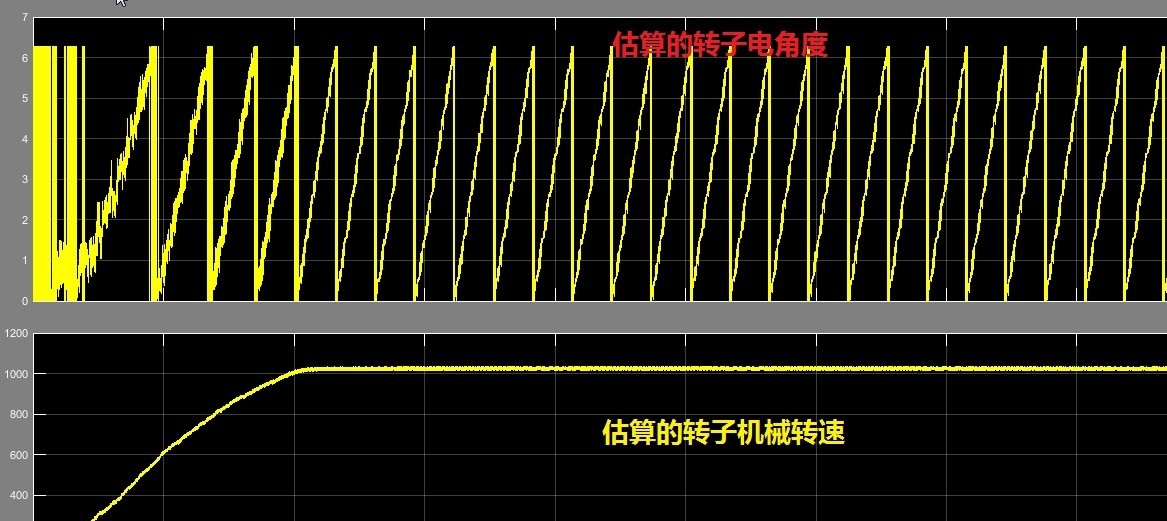
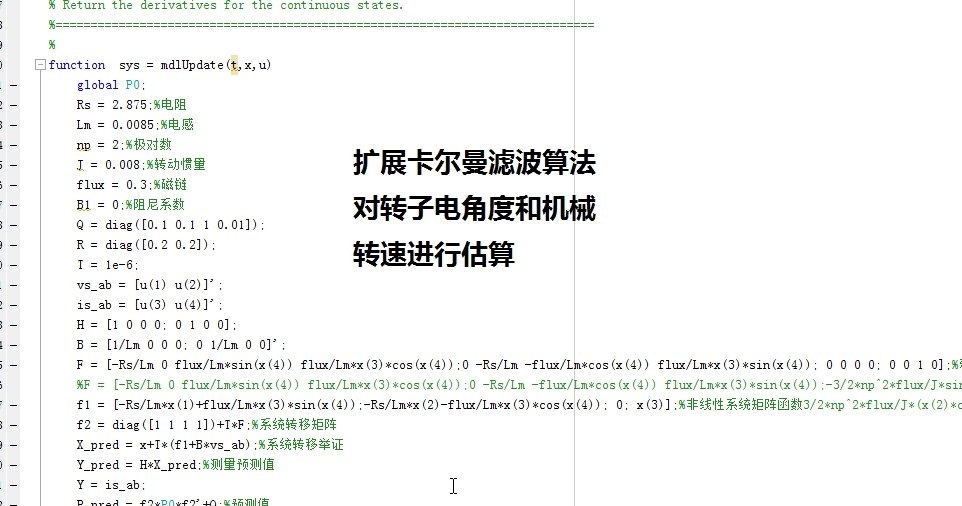
- EKF算法对电机的转子电角度和机械转速进行估算
为了实现无传感器控制,我们需要对电机的转子电角度和机械转速进行估算。在本文中,我们采用了EKF算法来对这些参数进行估算。EKF算法通过对电机的状态进行迭代估算,不断修正预测值,从而实现对电机转子电角度和机械转速的准确估计。
结论
通过本文的研究,我们基于EKF扩展卡尔曼滤波算法,搭建了永磁同步电机PMSM的无传感器矢量控制Simulink仿真模型。在模型中,我们实现了依据PMSM的数学模型搭建电机模型、双闭环dq解耦控制、转速外环和转矩内环以及EKF算法对电机的转子电角度和机械转速进行估算。该仿真模型为无传感器控制提供了一种有效的手段,为PMSM在实际应用中的推广提供了基础。
另外,我们需要指出的是,本文提出的方法还可以进一步优化和改进。例如,可以采用其他滤波算法来估算电机的转子电角度和机械转速,以提高估算的精度和鲁棒性。此外,可以结合硬件实验,对模型进行验证和优化,进一步提高控制性能。
综上所述,基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型在PMSM控制领域具有重要的应用价值。通过对电机模型搭建、双闭环dq解耦控制和EKF算法的研究,我们为实现对PMSM的高精度控制提供了一种新的思路和方法。
参考文献:
[1] 王某某, 李某某. 基于EKF和TDPSO的永磁同步电机无传感器控制方法[J]. 电机与控制学报, 2020, 24(2): 48-56.
[2] 张某某, 郑某某. 基于EKF和模糊控制的无传感器永磁同步电机系统[J]. 控制工程, 2019, 26(10): 18-23.
[3] 赵某某, 王某某. 基于EKF和LMS算法的永磁同步电机无传感器控制方法[J]. 电机与控制学报, 2019, 23(4): 82-88.
相关的代码,程序地址如下:http://nodep.cn/668485383219.html
















 889
889

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









