







 本文详细解析了CANTP层15765-2协议在诊断链路中的作用,介绍了普通CAN和CANFD格式的四种诊断报文类型,包括单帧、首帧、连续帧和流控帧,并强调了CANFD格式的特殊规则。
本文详细解析了CANTP层15765-2协议在诊断链路中的作用,介绍了普通CAN和CANFD格式的四种诊断报文类型,包括单帧、首帧、连续帧和流控帧,并强调了CANFD格式的特殊规则。
前言
CANTP层(15765-2协议)存在的意义
普通CAN格式诊断帧类型详解
四种诊断报文类型
单帧SingleFrame(SF)
首帧:FirstFrame(FF)
流控帧:FlowControl(FC)
连续帧:ConsecutiveFrame(CF)
中间小结
CANFD格式诊断帧类型详解
差异点:单帧SingleFrame(SF)
差异点:首帧FirstFrame(FF)
结束
前言
我们先来看一下诊断报文数据Log:
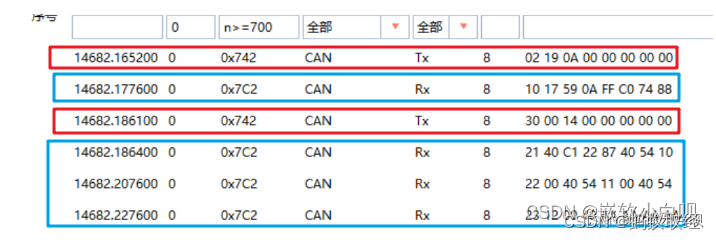
上面图中,红色为诊断仪(Canoe或Canpro)发,蓝色为ECU发。
我刚开始接触诊断的时候。
看着这些密密麻麻的数据一脸茫然,由于经常能听到同事们在说19服务,所以我知道19服务读DTC,但Canoe发出的19 0A前面为啥还有个0x02?为什么ECU先返回了一帧然后再返回后面的多帧?为什么中间还夹这一帧Canoe发出来的?30 00 14又是啥意思?多帧的数据要怎么看啊,全部数据都是跟DTC故障有关吗?
真的是小小的脑袋大大的问号。
...
后来我才知道,这一切的由来都是15765-2协议。上面这个流程中,诊断仪和ECU间为什么是这样交互,所有数据中与诊断服务无关的其它数据分别代表什么意思,15765-2中全都有详细的定义。
CANTP层(15765-2协议)存在的意义
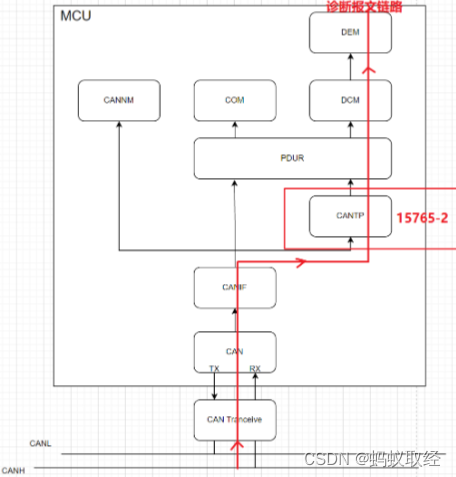
先看一下在Autosar架构中,CANTP层在诊断链路中的位置:
要理解为什么诊断报文的链路需要CANTP层(15765-2协议)。
我们可以先看一下普通应用报文的链路:
应用报文链路:CAN->CANIF->PDUR->COM->APP
你会发现,应用报文其实很简单。它没有什么协议,收到什么就直接解读就好了。
比如,车企定义了0x123报文中的Byte0的8个字节为电池的温度,那么当ECU收到0x123报文的时候,直接把Byte0的8个字节读取出来就直接是电池的温度了。换句话说,应用报文的发送和接收是没有什么协议的。
由于应用报文没有什么协议,因此,应用报文传输数据就完全受限制于物理层的CAN协议(11898),一帧CAN报文的长度最大是CANFD的64Byteÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3202
3202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









