




目录
3、编译固件和仿真((jMAVSim、Gazebo 、AirSim仿真))
前言
主要介绍过PX4开源飞控的开发环境搭建、编译、仿真及烧录,在仿真环节启动无人机模拟器,通过外部QGC地面站控制无人机或通过外部UDP服务器接收无人机数据。
一、PIXHAWK、PX4、APM 简述
1、概念介绍(PIXHAWK、PX4、APM)
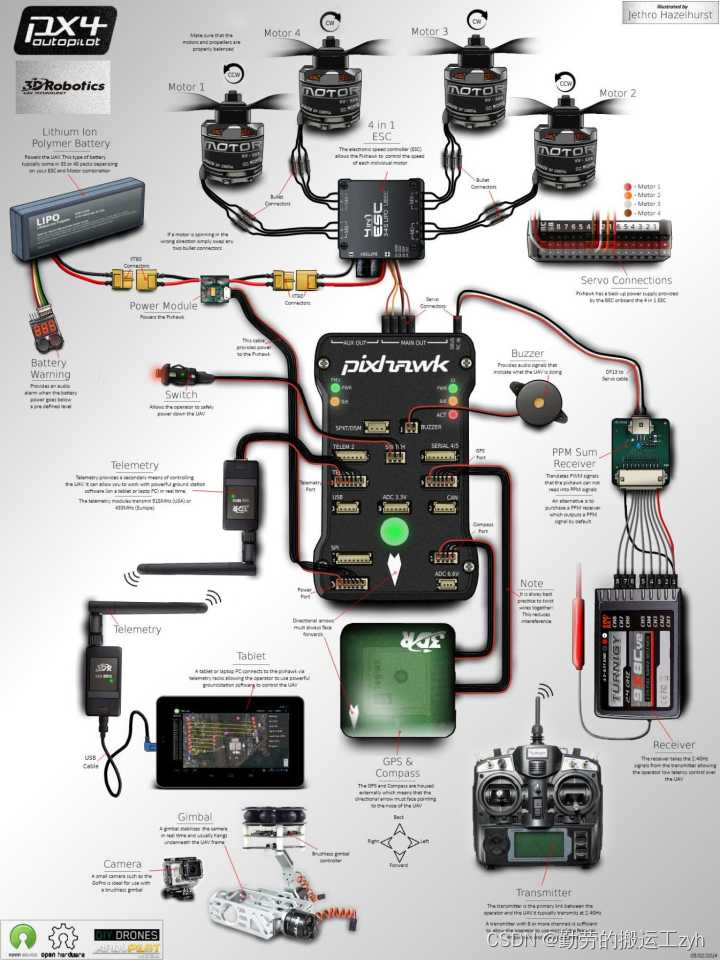
PIXHAWK是应用较广的开源飞控硬件平台,PX4和APM都是开源飞控软件平台,均可以烧写到PIXHAWK这款硬件板上
PX4飞控软件平台(PX4专为PIXHAWK开发的),它提供了一个虚拟环境,可以用来验证无人机的飞控算法,也可以连接开源硬件PIXHAWK。
PX4地面控制站被称为QGroundControl(简称QGC),PX4与地面站之间的通信是用mavlink协议,QT可以对地面站进行二次开发
APM飞控软件平台专为Arduupilot开发的固件,也可以烧写到PIXHAWK上
APM地面
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1337
1337

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











