







大家好,今天来和大家分享一下,舵机的控制方法,希望大家一起来学习。
一、目的
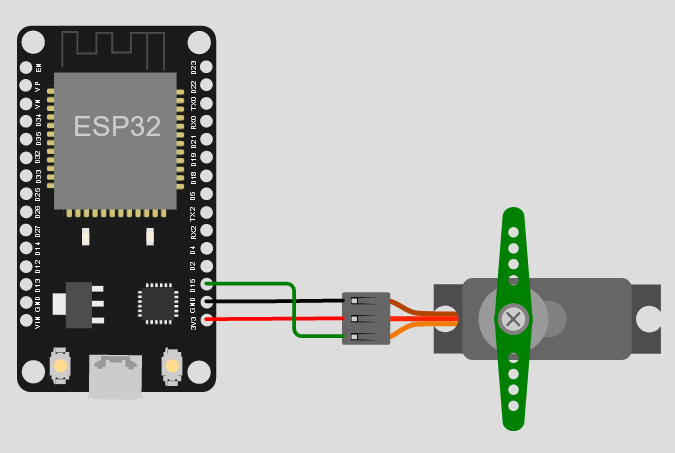
通过Wokwi网站使用micropython开发ESR32开发板,实现舵机控制。
二、硬件环境
舵机的官方使用说明,如果大家英文好,建议看英文的。英文不好的看中文的哈,都有的。
 https://docs.wokwi.com/parts/wokwi-servo
https://docs.wokwi.com/parts/wokwi-servo三、代码分析
main.py
# Micropython on ESP32开发板舵机控制演示。舵机初始状态是竖着的。0度时是横着的。
# 舵机的高电平周期对应的角度:
# 0.5ms--------------0度;
# 1.0ms----------- 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











