




 本文详细介绍了直流电机(有刷与无刷)、步进电机、伺服电机的工作原理,以及编码器在电机速度测量中的应用。还探讨了PID控制策略,包括PID三环控制(速度、位置、电流)及其在电机控制中的意义。此外,文中提到了低通滤波和闭环控制中的死区问题,以及舵机控制和PWM的相关知识。
本文详细介绍了直流电机(有刷与无刷)、步进电机、伺服电机的工作原理,以及编码器在电机速度测量中的应用。还探讨了PID控制策略,包括PID三环控制(速度、位置、电流)及其在电机控制中的意义。此外,文中提到了低通滤波和闭环控制中的死区问题,以及舵机控制和PWM的相关知识。
声明:以下图片来自于正点原子,仅做学习笔记使用
电机专题:
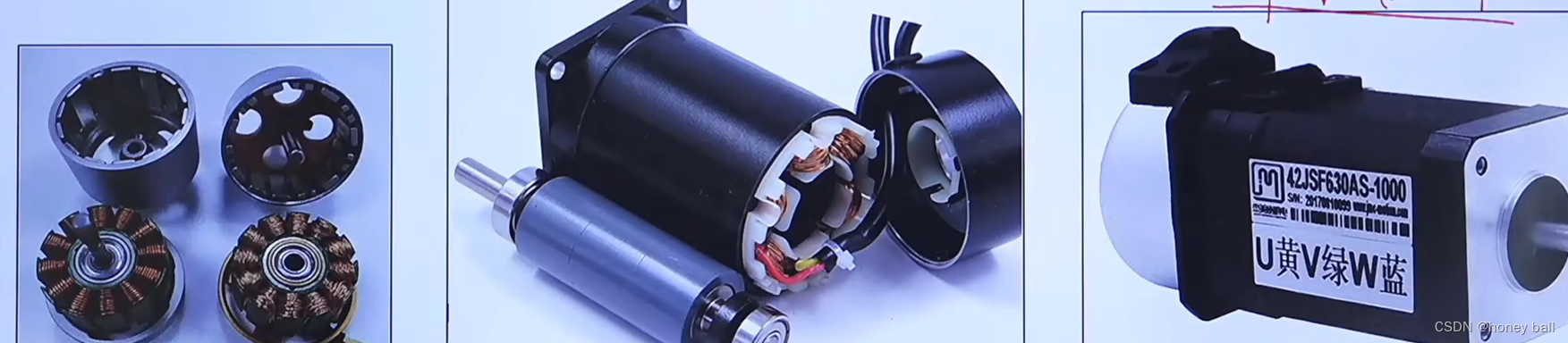
直流电机:直流有刷BDC(内含电刷),直流无刷BLDC(大疆的M3508和M2006),无刷电机有以下三种形式:(第三种叫做永磁同步电机,换相方式为正弦波,前两种为方波)
步进电机:电脉冲信号驱动角位移或相位移
伺服电机:绝对服从驱动信号的控制,价格昂贵,如下图所示:

、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
直流有刷BDC:
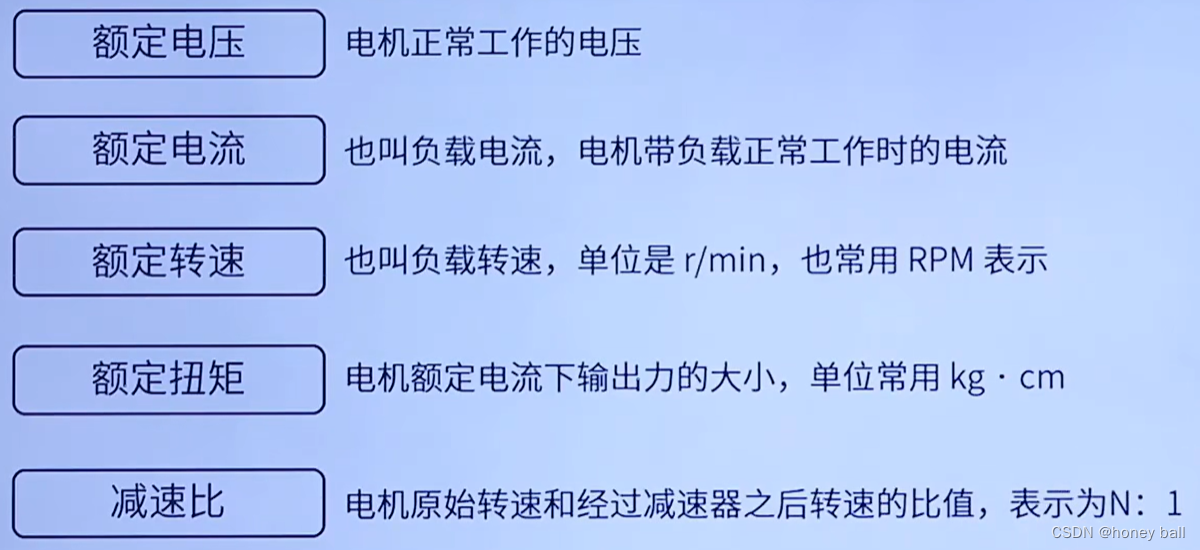
仅需调整电压即可调整转速,内部结构包括:定子(产生磁场),转子,换向器(改变绕组电流流向)和电刷,加上减速齿轮便可以获得较大的扭矩,直流电机关键参数:
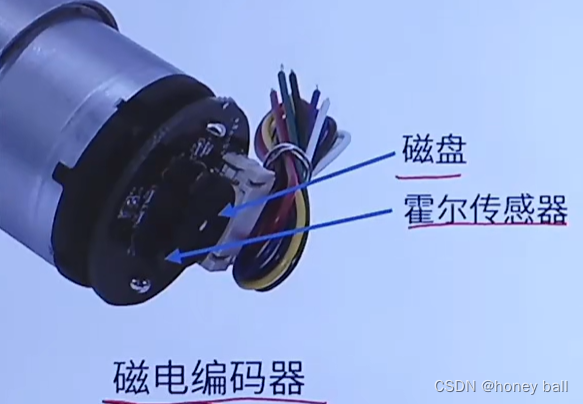
加装霍尔传感器进行计数:
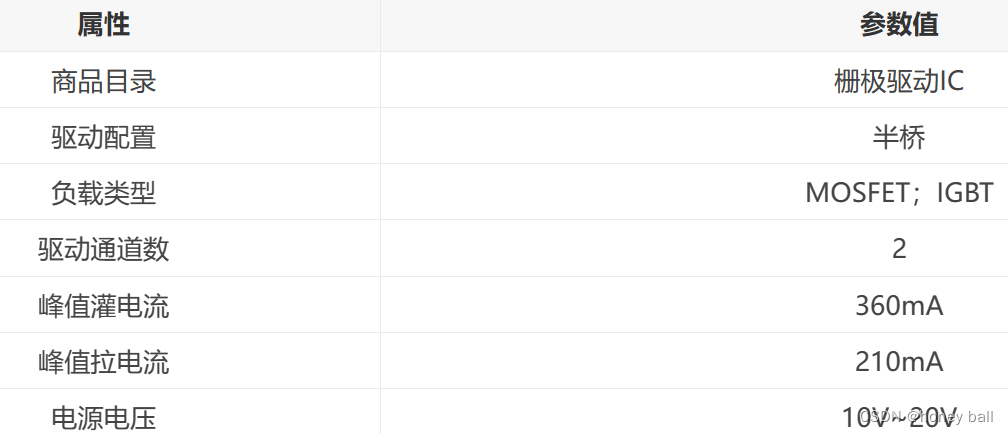
H桥驱动:
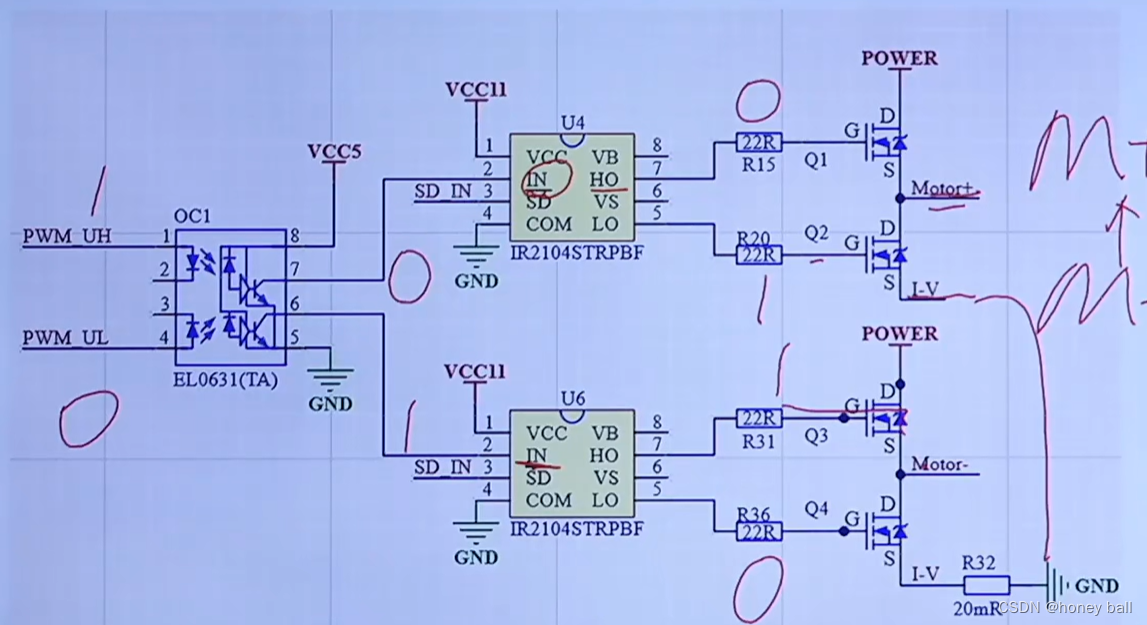
IR2104STRPBF:半桥式驱动器,输出电压:10V to 20V,输出电流:130 mA
要么Motor+输出为正,要么Motor-输出为正(光耦隔离输入输出反相)R22电压为0ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









