







1.极对数不对不转,原地抖动!!!
FOC做位置闭环的时候电机原地抖动,不能转到指定的位置,是什么原因:
在使用 FOC(磁场定向控制)做位置闭环时,电机原地抖动且无法转到指定位置,可能由以下原因导致:
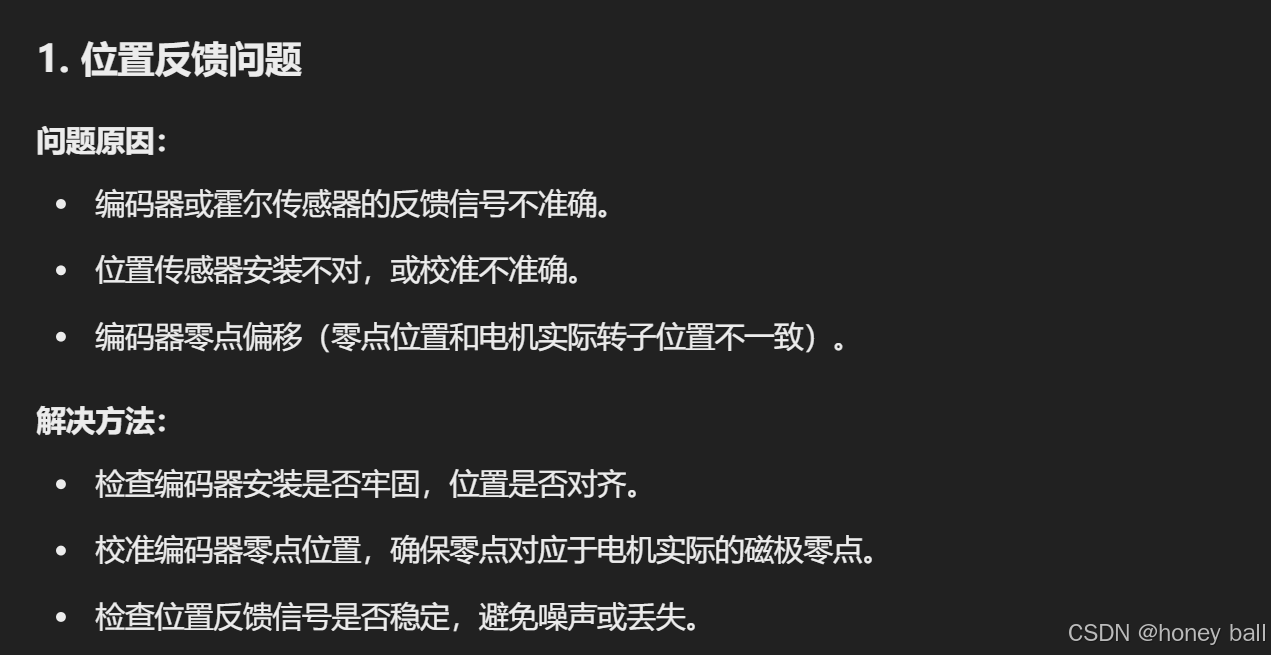
1. 位置反馈问题
问题原因:
- 编码器或霍尔传感器的反馈信号不准确。
- 位置传感器安装不对,或校准不准确。
- 编码器零点偏移(零点位置和电机实际转子位置不一致)。
解决方法:
- 检查编码器安装是否牢固,位置是否对齐。
- 校准编码器零点位置,确保零点对应于电机实际的磁极零点。
- 检查位置反馈信号是否稳定,避免噪声或丢失。
2. PI/PID 控制器参数不匹配
问题原因:
- 位置环的 P、I 参数设置不当。
- 如果 P 参数过大,系统响应过快,容易引起抖动。
- 如果 I 参数过大,可能导致积分饱和或过冲。
- 速度环或电流环的参数也可能不匹配,影响稳定性。
解决方法:
- 调整位置环的 PID 参数,逐步减小 P 值观察抖动是否改善。
- 增大 D 参数来抑制快速变化的误差。
- 保证位置环、速度环、电流环的调节时间常数合理匹配(通常:电流环 < 速度环 < 位置环)。
3. 目标位置更新频率过快
问题原因:
- 如果位置目标值变化过于频繁,电机来不及响应,容易出现抖动。
解决方法:
- 在目标位置变化时添加滤波器(如低通滤波),平滑目标位置信号。
- 限制目标位置的最大变化率,避免瞬间的过大跳变。
4. 惯量和负载匹配问题
问题原因:
- 电机控制器未考虑负载的惯量或阻尼特性,导致振荡。
- 特别是在惯量较大的系统中,未匹配的参数可能引发不稳定。
解决方法:
- 在控制器中引入惯量补偿或前馈控制。
- 对负载特性进行建模,调整控制器参数以匹配负载特性。
5. FOC 算法本身问题
问题原因:
- Clarke 或 Park 变换的电角度计算错误。
- 电流环控制未能正确生成目标电流。
解决方法:
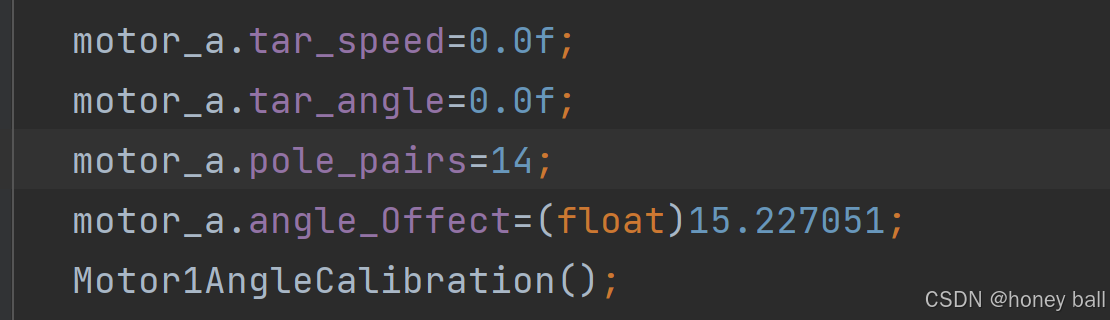
- 检查电机的电角度计算是否正确(通常由极对数、编码器信号和反馈算法决定)。
- 验证 Clarke 和 Park 变换的输入是否正确。
- 确保电流环的 PI 控制参数已经正确调整,避免电流波形畸变。
6. 电机相位角与传感器不匹配
问题原因:
- 编码器位置与电机的实际磁极位置不同步,导致无法生成正确的电流矢量。
解决方法:
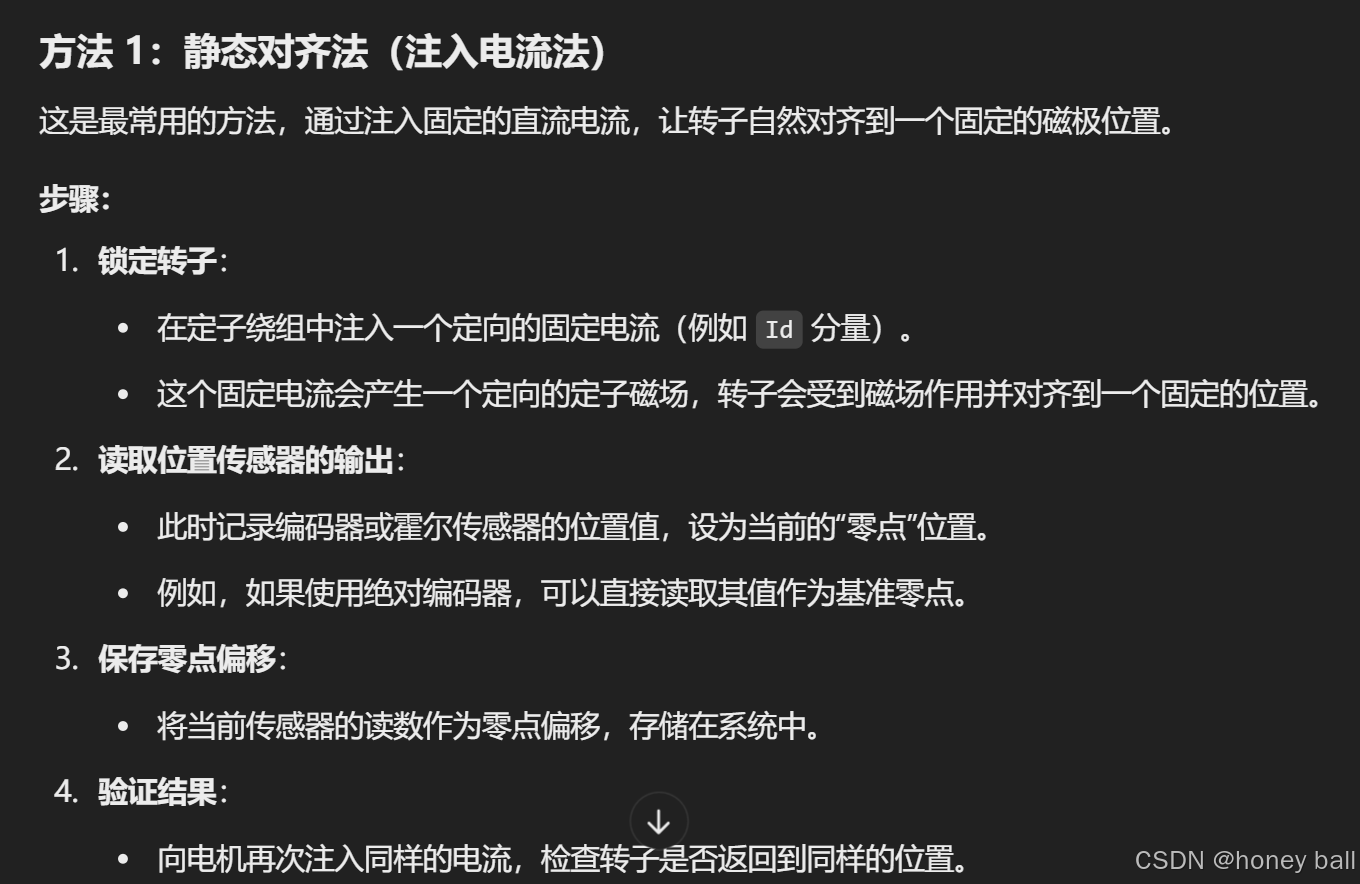
- 使用静态校准法:
- 锁定电机(注入固定电流)。
- 读取编码器角度,将其调整到电机磁极的实际位置。
- 动态调整相位:
- 运行 FOC 并观察转子运动,修正相位偏差。
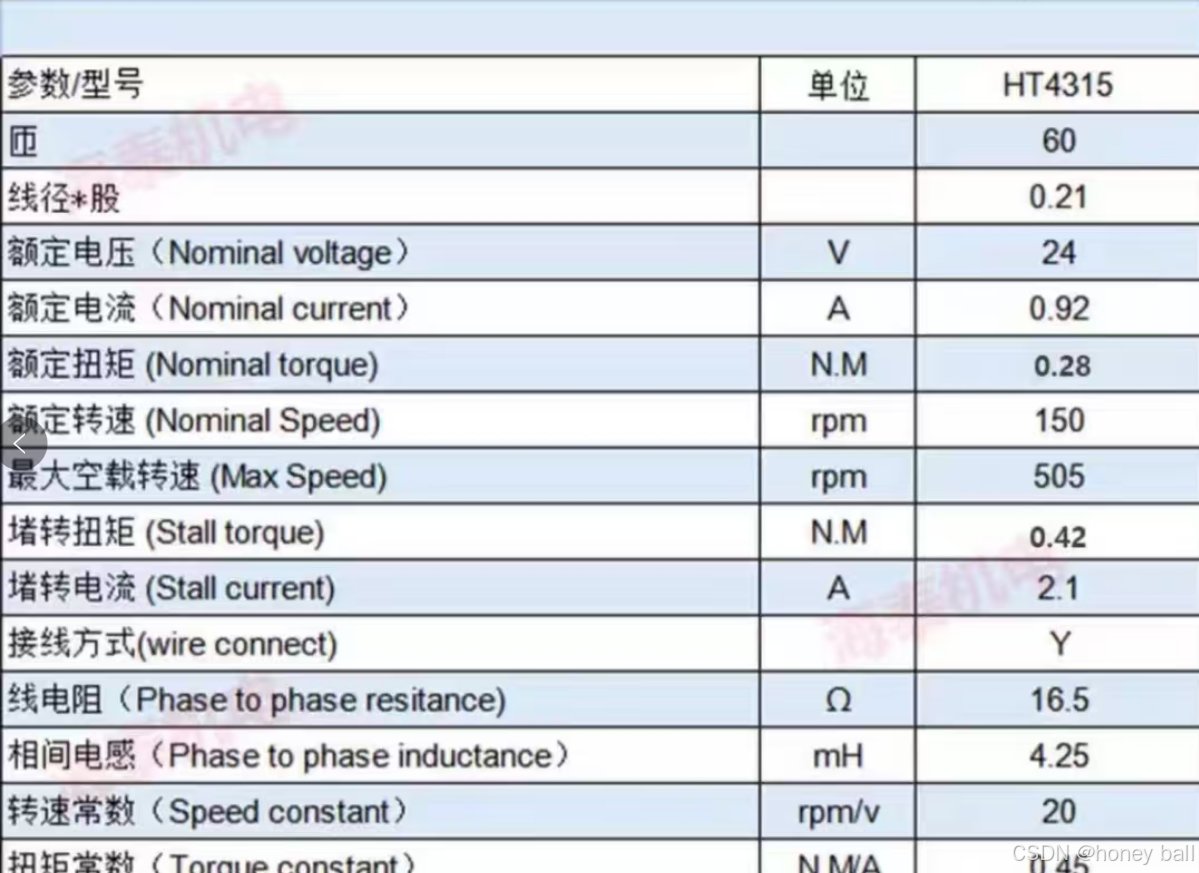
7. 电机参数不准确
问题原因:
- 电机的参数(如定子电阻、感抗、磁链常数等)未正确设置,导致控制器模型与电机实际特性不符。
解决方法:
- 使用 LCR 测试仪或厂商提供的参数校准工具,获取电机的实际参数。
- 确保控制器中设置的参数与电机实际参数一致。
8. 硬件或噪声干扰
问题原因:
- 驱动器的电流采样或信号处理受到噪声影响,导致误操作。
- 电源供电不稳定,影响系统运行。
解决方法:
- 检查驱动电路的电流采样电阻和滤波电路是否正常。
- 添加适当的电磁屏蔽,减少干扰。
- 确保供电电源电压稳定,并提供足够的功率余量。
调试步骤建议
-
单独验证每一环路:
- 测试电流环和速度环是否能够稳定工作。
- 确保位置环的输入输出无明显抖动。
-
逐步调整参数:
- 调整 PID 参数,从低到高逐渐增加,避免一开始过大。
-
观察反馈信号:
- 使用示波器查看编码器信号、电流环信号是否稳定。
-
运行测试:
- 以低速运行,逐渐增加到目标位置,观察是否有抖动。

















 3987
3987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









