







大林控制算法(Dahlin Algorithm) 是一种专门针对纯滞后系统的控制方法,它基于离散化的数学模型,将系统的目标输出设计为一个期望响应,利用反向推导的方式计算控制器的输出。此方法的特点是响应速度快,且在满足设计模型的情况下,具有较好的控制性能。
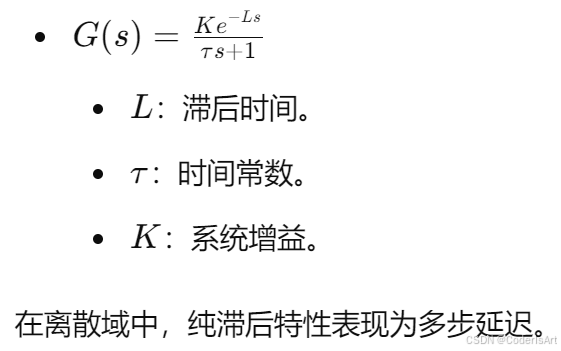
1. 纯滞后系统的特点
纯滞后系统是指系统的输出滞后于输入,且滞后时间不能被轻易补偿。例如:
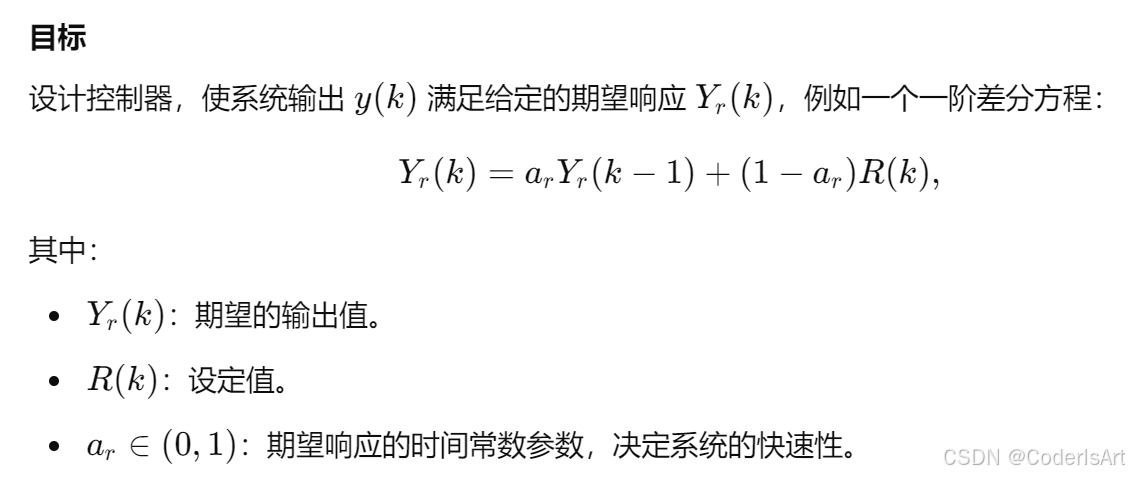
2. Dahlin控制算法原理
控制器实现
控制器实现需要用差分方程计算控制输出:
u(k)=基于误差和模型反演的控制量.u(k) = \text{基于误差和模型反演的控制量}.u(k)=基于误差和模型反演的控制量.
3. Dahlin算法的离散化实现
以下是大林控制算法的实现步骤:
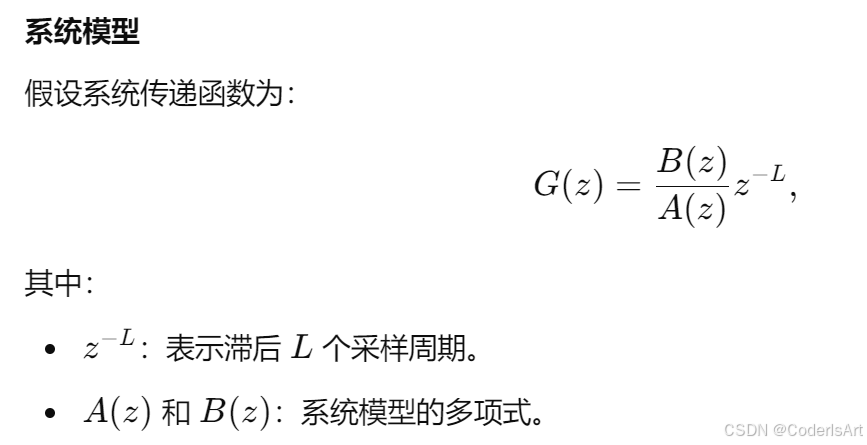
- 离散化系统模型: 使用 Z 变换得到系统的离散模型 G(z)G(z)G(z)。
- 选择期望响应 ara_rar: 确定 ara_rar 来决定系统响应的快慢。
- 计算控制器系数: 根据公式计算 Gc(z)G_c(z)Gc(z) 的系数。
- 在线计算控制信号: 根据离散差分方程实时计算控制信号。
4. C++ 实现代码
下面的代码是一个基于 Dahlin 算法的控制器的实现:
#include <iostream>
#include <vector>
class DahlinController {
private:
double ar; // 期望闭环时间常数
int delay; // 系统滞后步数
std::vector<double> A; // 系统模型分母系数
std::vector<double> B; // 系统模型分子系数
std::vector<double> u; // 控制信号历史值
std::vector<double> y; // 输出信号历史值
std::vector<double> r; // 设定值历史值
public:
// 构造函数
DahlinController(double ar, int delay, std::vector<double> A, std::vector<double> B)
: ar(ar), delay(delay), A(A), B(B) {
u.resize(delay + 1, 0.0); // 初始化控制信号
y.resize(A.size(), 0.0); // 初始化输出信号
r.resize(2, 0.0); // 初始化设定值
}
// 更新控制信号
double compute(double setpoint, double output) {
// 更新设定值和输出值历史
r[1] = r[0];
r[0] = setpoint;
y[1] = y[0];
y[0] = output;
// 计算控制器差分方程
double u_next = (1 - ar) * r[0]
+ ar * r[1]
- (A[1] * y[0])
+ (B[1] * u[1]);
// 更新控制信号历史
u[1] = u[0];
u[0] = u_next;
return u_next;
}
};
int main() {
// 系统模型参数
double ar = 0.8; // 期望响应系数
int delay = 1; // 滞后步数
std::vector<double> A = {1.0, -0.8}; // 系统分母多项式
std::vector<double> B = {0.2, 0.1}; // 系统分子多项式
// 创建 Dahlin 控制器
DahlinController controller(ar, delay, A, B);
// 模拟控制系统
double setpoint = 1.0; // 目标值
double output = 0.0; // 系统初始输出
for (int k = 0; k < 50; ++k) {
double controlSignal = controller.compute(setpoint, output);
// 模拟系统响应
output = 0.8 * output + 0.2 * controlSignal;
// 输出结果
std::cout << "Step: " << k
<< ", Control Signal: " << controlSignal
<< ", Output: " << output << std::endl;
}
return 0;
}
5. 代码说明
-
系统模型参数:
A和B定义了系统模型的分母和分子系数。- 滞后步数
delay用于表示系统的滞后特性。
-
控制器公式: 控制器基于 Dahlin 算法,通过差分方程计算控制信号 u(k)u(k)u(k)。
-
模拟过程: 系统输出由控制信号 u(k)u(k)u(k) 作用产生,输出值依赖于系统动态方程。
6. 优点与局限性
优点
- 快速响应:通过选择合适的 ara_rar,系统可以快速逼近设定值。
- 适应纯滞后系统:有效解决纯滞后引起的控制困难。
- 设计简单:基于模型的反演计算控制信号。
局限性
- 模型依赖性强:需要精确的系统模型 G(z)G(z)G(z),否则性能会下降。
- 对噪声敏感:微分特性使得控制器对高频噪声较为敏感。
- 滞后步数限制:需要足够的采样点以保证响应。
7. 总结
Dahlin 控制算法是一种面向离散纯滞后系统的有效控制方法,通过引入期望响应和系统模型反演实现控制信号的推导。它适合具有明显滞后特性但动态较简单的系统,如加热炉、运输带等。实际应用中,配合适当的滤波和模型校正,可以显著提升系统性能。
Dahlin 控制器是一种适用于 离散时间纯滞后系统 的控制方法,主要应用于以下场合:
1. 过程控制中的应用
许多工业过程具有明显的滞后特性和动态特性。Dahlin 控制器在这些场景中表现优异,常用于以下领域:
(1) 温度控制系统
- 典型场景:
- 电炉、热处理炉的温度控制。
- 需要调节目标温度时,由于热惯性,系统会有明显的响应滞后。
- 优势:
- 快速响应设定值变化。
- 有效补偿滞后特性,避免超调和振荡。
(2) 流量控制系统
- 典型场景:
- 液体或气体的流量控制系统,如化工生产中的流体输送。
- 流体通过长管道传输时,存在显著的滞后现象。
- 优势:
- 滞后补偿可以确保流量稳定。
- 对设定值的快速响应使其适合动态负载调整。
(3) 压力控制系统
- 典型场景:
- 锅炉压力调节。
- 工艺管道的压力维持。
- 优势:
- 对设定压力的稳定跟踪。
- 抑制滞后带来的压力波动。
2. 自动化运输和传输系统
在涉及物流运输或工业物料输送的系统中,滞后特性广泛存在,Dahlin 控制器是理想的解决方案:
(1) 输送带控制
- 典型场景:
- 自动化生产线中的输送带。
- 输送带速度或物料传送距离的精确控制。
- 优势:
- 快速调整输送速度以适应动态生产需求。
- 对输送系统的滞后进行有效补偿。
(2) 液体运输控制
- 典型场景:
- 长距离输水、输油管道的流量和压力控制。
- 优势:
- 补偿流体在管道中传输的时间延迟。
- 稳定流量,避免水锤效应。
3. 化工和能源行业
Dahlin 控制器因其对滞后特性的适应性,在化工和能源行业得到广泛应用:
(1) 化工反应过程
- 典型场景:
- 温度、压力、流量等变量的精确控制。
- 化工反应过程通常具有较大的时间滞后。
- 优势:
- 实现高精度控制,提高反应效率。
- 减少反应条件波动,提升产品质量。
(2) 电厂锅炉控制
- 典型场景:
- 锅炉的蒸汽温度、压力控制。
- 锅炉燃烧过程因热惯性存在显著滞后。
- 优势:
- 及时响应负载变化。
- 保证蒸汽质量和热效率。
4. 通信和信息技术
在数字信号处理和数据传输领域,Dahlin 控制器可以用来优化延迟引起的性能问题:
(1) 网络流量管理
- 典型场景:
- 数据传输中的带宽控制。
- 网络延迟优化。
- 优势:
- 快速适应带宽变化。
- 减少传输延迟和数据包丢失。
(2) 信号采样与控制
- 典型场景:
- 采样率较低的控制系统。
- 数据处理中的滞后补偿。
- 优势:
- 通过离散化算法对采样系统进行滞后补偿。
- 提升采样控制的动态性能。
5. 自动化系统
Dahlin 控制器在自动化设备和机器人控制中表现良好:
(1) 伺服控制系统
- 典型场景:
- 伺服电机的速度或位置控制。
- 机械臂的轨迹跟踪。
- 优势:
- 提高轨迹跟踪精度。
- 减少滞后对运动精度的影响。
(2) 自动化生产线
- 典型场景:
- 需要精确控制的动态生产系统。
- 优势:
- 快速响应生产线动态变化。
- 减少滞后对产品质量的影响。
6. 医疗设备
医疗设备中需要精确调节的过程也常采用 Dahlin 控制器:
(1) 药液输送系统
- 典型场景:
- 输液泵、药液注射设备。
- 优势:
- 减少输送延迟引起的剂量不一致。
- 提高输液流速的精确性。
(2) 温控设备
- 典型场景:
- 手术室、培养箱等设备的温度控制。
- 优势:
- 保证温度快速稳定在目标范围。
7. 适合应用Dahlin控制的系统特性
Dahlin 控制器特别适合以下类型的系统:
- 存在显著滞后:
- 滞后时间显著影响系统动态性能。
- 动态特性简单:
- 一阶或二阶系统更适合,复杂非线性系统需配合建模。
- 需要快速响应:
- 期望快速响应设定值并保持稳定。
- 采样周期固定:
- Dahlin 控制器假设采样周期固定,适用于数字控制系统。
8. 现实应用中的限制
尽管 Dahlin 控制器有较多优势,但在实际应用中也有一些限制:
- 模型精度依赖性:
- 如果系统模型不够精确,控制效果会下降。
- 噪声敏感性:
- Dahlin 控制器对测量噪声较为敏感,需要配合滤波器使用。
- 滞后补偿范围有限:
- 滞后时间太长时,控制器性能可能不佳。
总结
Dahlin 控制器 是一种针对 离散纯滞后系统 的高效控制方法,广泛应用于 工业过程控制、自动化运输、能源化工、信息通信 等领域。适合具有滞后特性、动态简单、采样周期固定的系统。尽管其模型依赖性较强,但通过正确的系统建模与参数整定,可以显著提升系统的动态性能和稳定性。

















 1026
1026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









