







二质量伺服系统是一种常见的复杂伺服系统,通常由电机驱动器和负载组成,电机和负载之间通过柔性联轴器或弹性联接连接。由于弹性联接的存在,系统中会出现弹性振荡和相位延迟问题,这给控制带来了挑战。PID控制是实现其稳定控制的基本方法之一,通常需要改进或结合其他策略来应对振荡特性。
1. 二质量伺服系统的基本模型
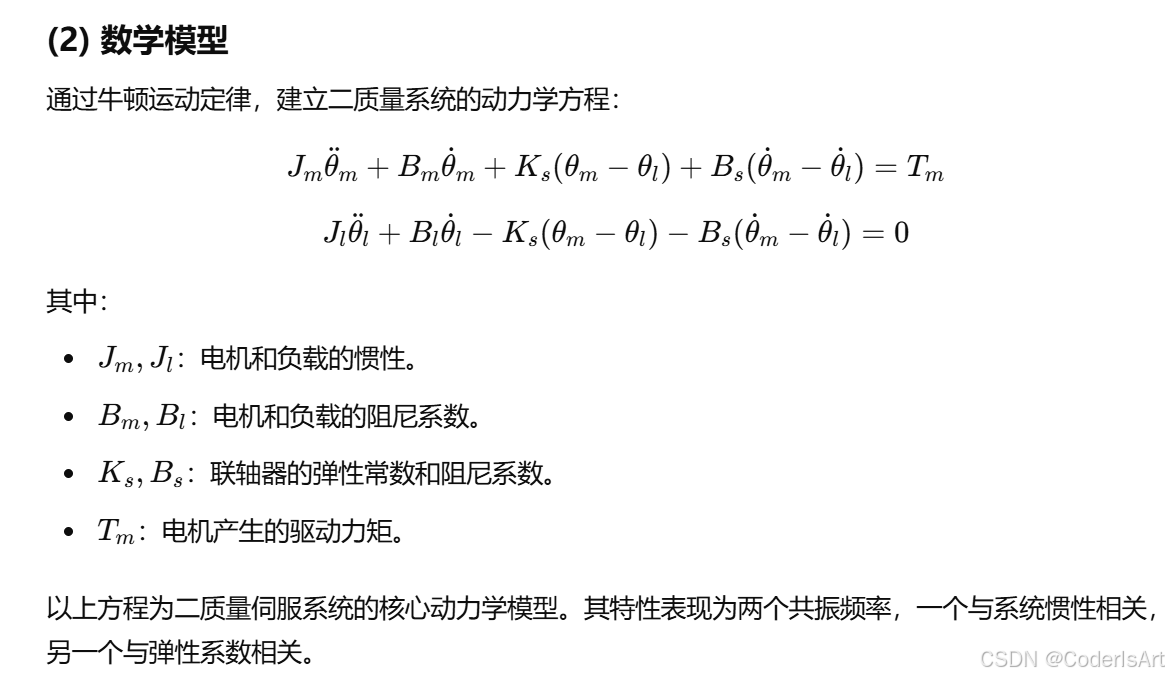
(1) 系统结构
- 电机部分:由电机转子和驱动器组成,惯性为 JmJ_mJm,由控制输入驱动。
- 负载部分:由外部负载组成,惯性为 JlJ_lJl。
- 弹性联接:连接电机和负载,具有弹性常数 KsK_sKs 和阻尼系数 BsB_sBs。
- 主要变量:
- θm\theta_mθm:电机转子角度。
- θl\theta_lθl:负载角度。
- TmT_mTm:电机输出转矩。
- TsT_sTs:弹性联轴器的弹性力矩。
2. 二质量伺服系统的控制目标
- 消除弹性振荡:由于弹性联接的存在,系统容易在共振频率处出现振荡,控制器需有效抑制这些振荡。
- 精确跟踪目标:实现负载位置 θl\theta_lθl 的高精度跟踪。
- 快速动态响应:保证系统的快速响应,减少超调和响应时间。

缺点
- 无法完全抑制二质量系统的弹性振荡。
- 动态性能可能较差,特别是在高增益下容易引发共振。
(2) 双闭环PID控制
原理
双闭环控制结构在传统位置环的基础上增加速度环,分别控制电机速度和负载位置。

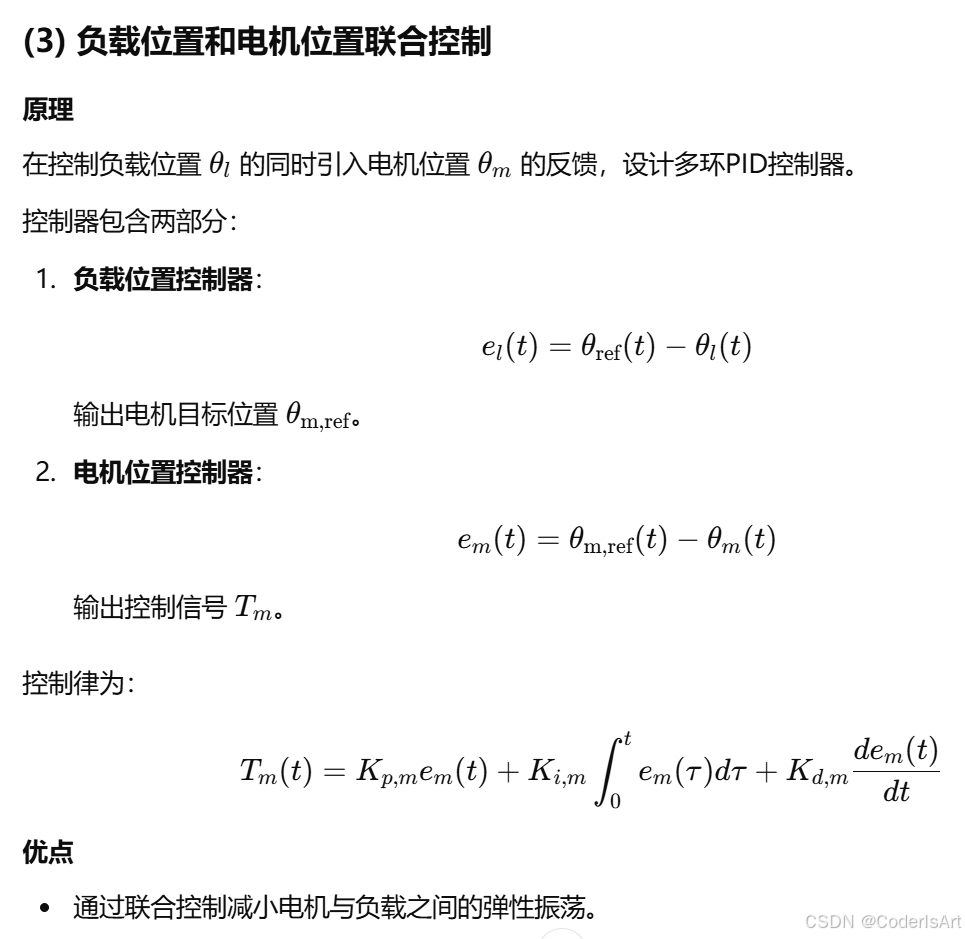
- 改善动态响应,同时保证负载位置精度。
缺点
- 参数整定较难,要求对系统的动力学特性有深入理解。
4. 改进PID控制方法
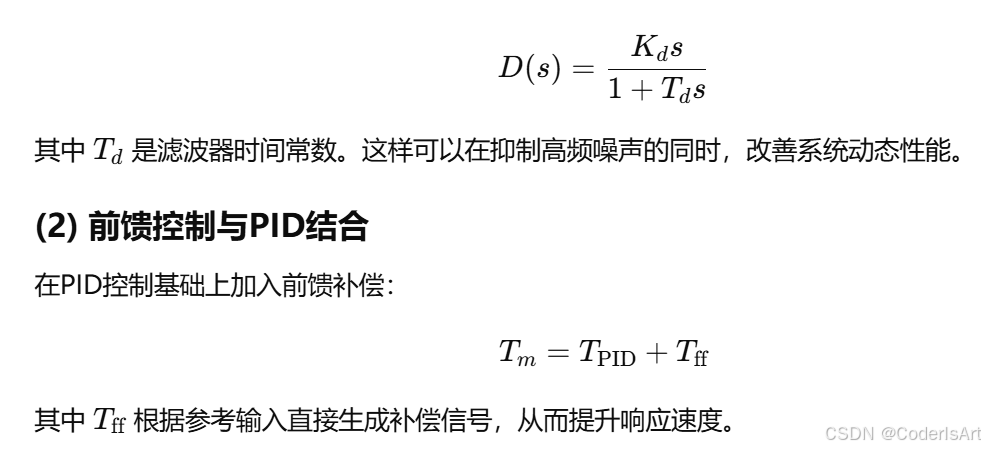
(1) 带滤波器的PID控制
为避免高频共振,在PID控制中对微分项进行滤波:
(3) 振荡抑制控制
引入滤波器或振荡模式抑制器,专门针对二质量系统的共振频率进行抑制,例如在控制器中设计补偿器来吸收振动。
5. 总结
在二质量伺服系统中,经典PID控制方法虽然简单易用,但受限于系统的弹性特性,可能引发振荡或动态性能不足。通过引入双闭环控制、联合控制或改进型PID控制,可以在一定程度上改善动态性能并抑制振荡。然而,要实现高性能控制,往往需要结合现代控制方法(如鲁棒控制、自适应控制或模型预测控制)来进一步优化性能。

















 4048
4048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









