







坐标系
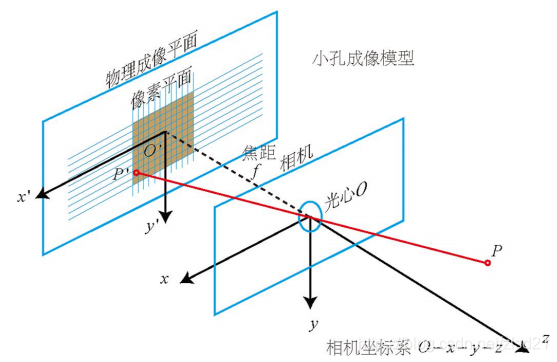
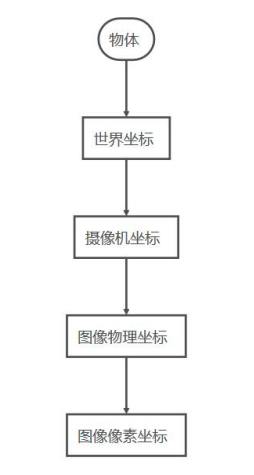
针孔相机模型存在四个坐标系:世界坐标系、摄像机坐标系、图像物理坐标系和图像像素坐 标系。
假设:
• 世界坐标系的坐标为Pw(Xw,Yw,Zw),
• 对应的摄像机坐标系坐标为Po(x,y,z),
• 对应的图像物理坐标系的坐标为P’(x’,y’),
• 对应的图像像素坐标系的坐标为p(u,v)。
| 名称 | 定义 |
|---|---|
| 世界坐标系 | 是客观三维世界的绝对坐标系,也称客观坐标系。就是物体在真实世界中的坐标。 世界坐标系是随着物体的大小和位置变化的,单位是长度单位。 |
| 相机坐标系 | 以相机的光心为坐标系的原点,以平行于图像的x和y方向为x轴和y轴,z轴和光轴平行,x, y,z互相垂直,单位是长度单位。 |
| 图像物理坐标系 | 以主光轴和图像平面交点为坐标原点,x’和y’方向如图所示,单位是长度单位。 |
| 图像像素坐标系 | 以图像的顶点为坐标原点,u和v方向平行于x’和y’方向,单位是以像素计。 |
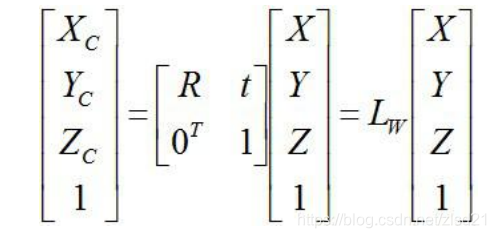
世界坐标系到摄像机坐标系
这两个坐标系之间除了旋转矩阵R,还存在平移矩阵t。其关系可表示为:
欧式变换
欧氏变换由两部分组成:
• 旋转
• 平移
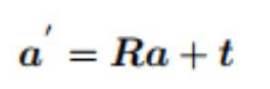
引入欧式变换的概念的目的是说明从世界坐标系到摄像机坐标系使用了欧式变换
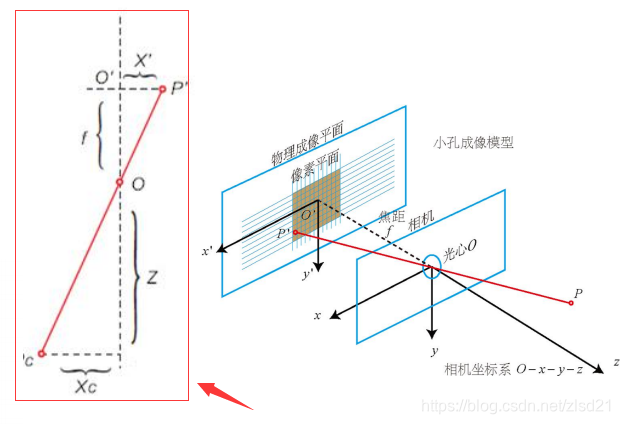
摄像机坐标系到图像物理坐标系
如下图所示我们从摄像机坐标系到图像物理坐标系使用的相似三角形的原理

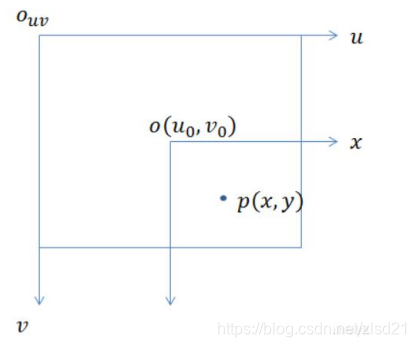
图像物理坐标系到图像像素坐标系
在下图中uov平面为物理坐标系,xoy为像素坐标系,我们已知像素坐标系的原点为(u0,v0),在像素坐标系中的p点(x,y),求在物理坐标系中p点坐标?
原理如下
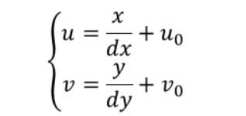
1/dx和1/dy表示:x方向和y方向的一个像素分别占多少个(可能是小 数)长度单位。
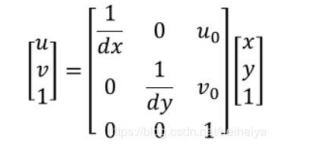
齐次坐标下:
摄像机坐标系直接到图像像素坐标系

世界坐标系到图像像素坐标系
较上一步多了一个世界坐标系到摄像机坐标系做欧式变化的过程

相机成像原理

镜头畸变
- 透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真。
- 镜头的畸变分为径向畸变和切向畸变两类。
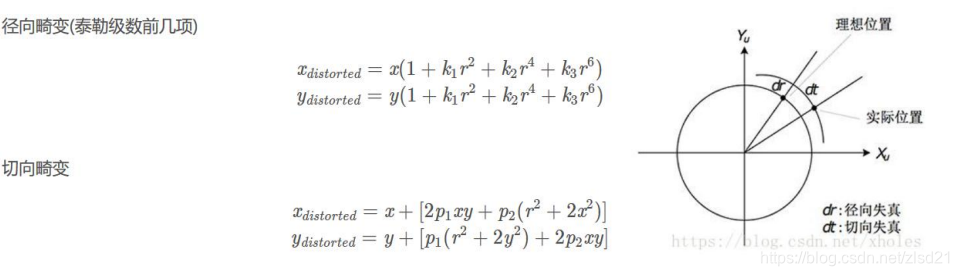
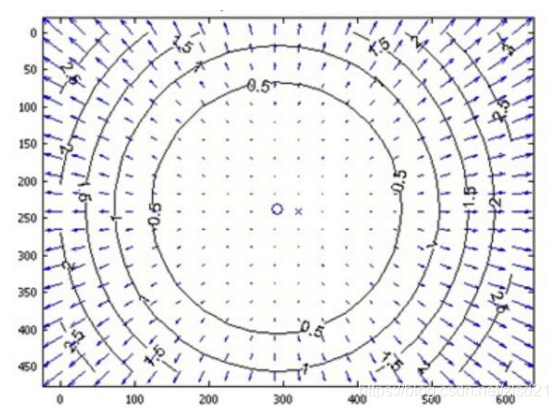
径向畸变
由透镜的形状引起的畸变称为径向畸变,透镜径向畸变后点位的偏移示意图
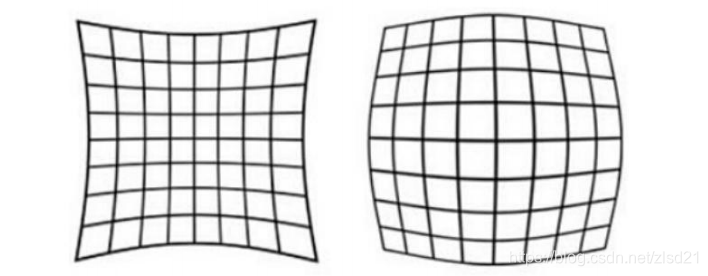
径向畸变主要分为枕形畸变和桶形畸变两种:
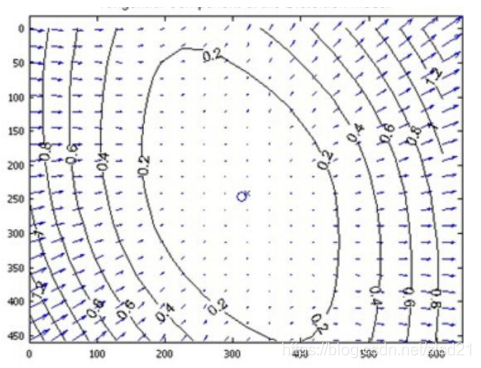
切向畸变
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的。 这种情况多是由于透镜被粘贴到镜头模组上的安装偏差导致。
畸变矫正

要想完成畸变矫正我们要引入一个透视变换的概念
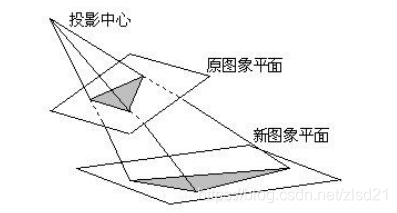
透视变换
透视变换是将图片投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。 我们常说的仿射变换是透视变换的一个特例。 透视变换的目的就是把现实中为直线的物体,在图片上可能呈现为斜线,通过透视变换转换成直线 的变换。
仿射变换(Affine Transformation或 Affine Map),又称为仿射映射,是指在几何中,图像进行从 一个向量空间进行一次线性变换和一次平移,变换为到另一个向量空间的过程。














 6780
6780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









