






反步法设计:
1.建立四旋翼无人机非线性模型:

2.位置环虚拟控制律及反步控制器设计:

3. 姿态解算

4.姿态环虚拟控制律及反步控制器设计:

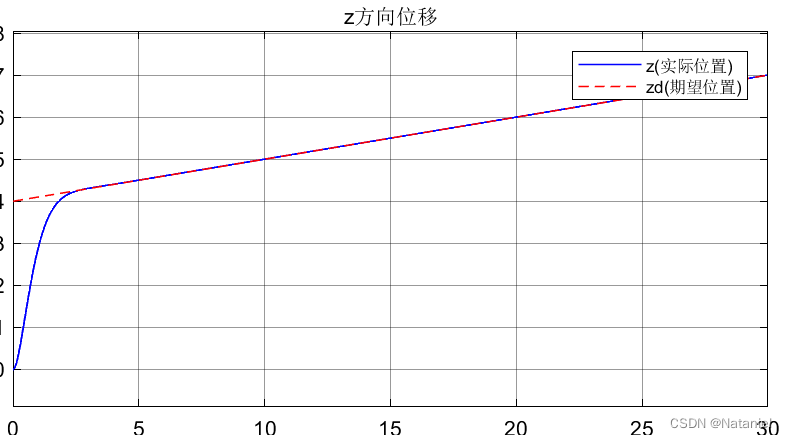
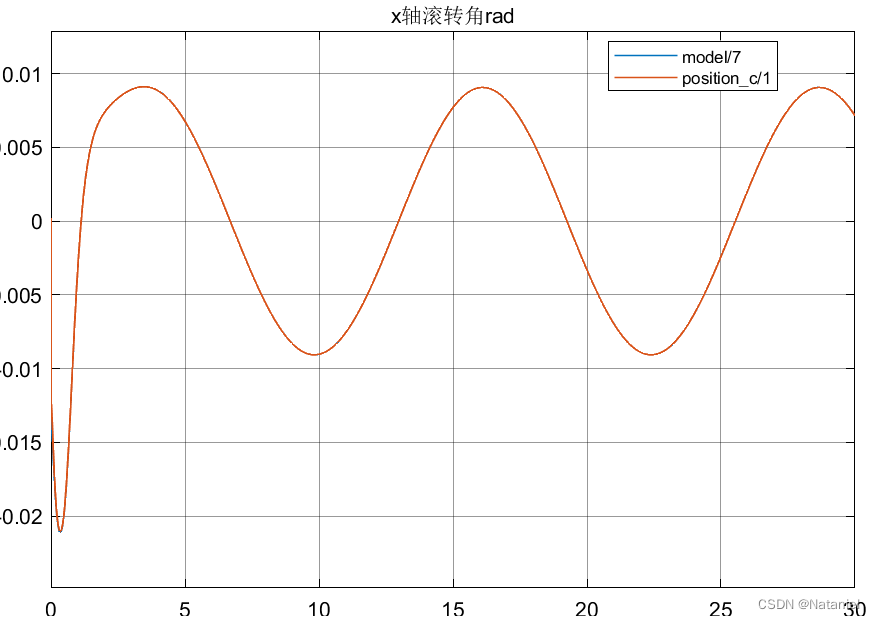
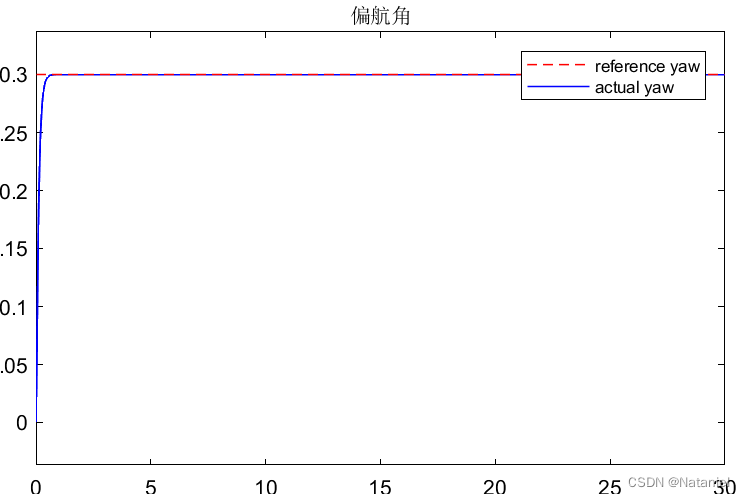
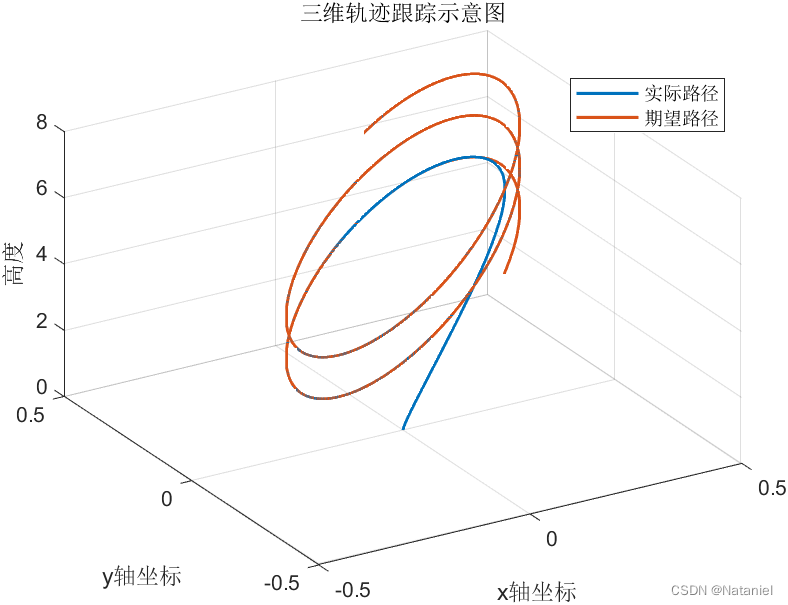
5.搭建simulink,仿真结果如下:




 1056
1101
4750
6581
1056
1101
4750
6581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























