







前面已经介绍了如何使用URDF建造机器人小车并显示在Rviz的仿真环境里面,但是小车是静止的。下面介绍如何让它在Rviz里面动起来,并理清URDF,TF 和 odom 的关系。
1. ROS中base_link, odom, fixed_frame, target_frame和虚拟大地图map的关系
一般在urdf文件中都要定义base_link,它代表了机器人的主干,其它所有的frame都是相对于base_link定义并粘在一起的。它们一起相对于大地图map移动,让机器人移动就是向tf发布 geometry_msgs::TransformStamped 消息通知ros base_linke相对于map的tf转换关系。先看一下这几个概念在ros中的定义:
map
map是虚拟世界中的固定frame, 它的Z轴指向正上方,也就是天空。一个时间点上移动机器人的姿态相对于map不应该出现明显的漂移。如果一个map是不连续稳定的那就意味着机器人的位置在任何一个时间点上都会是变化的。
一般激光地位仪等设备会连续的计算map的位置因而造成它的不稳定性,这也使它不能成为一个好的参照体frame.
odom
odom是一个很好的固定世界参照frame.机器人的姿态相对odom而言是随时间是经常可变,所以在长远中它不是一个好的全局参照系。但在某一时间点而言它相对机器人的位置是不变的。
典型的 odom frame 是通过运动源来计算出来的, 例如轮子运动,视觉偏移等.
odom frame 的准确性使它在局部参照系中是很有用的。但是不适合作全局参照frame.
base_link
base_link参照系紧紧粘在移动机器人基座上的任何一个位置和角度。
Frame Authorities
odom到base_link的坐标转换是从运动源计算出来广播的。
map到base_link的坐标转换是被定位模块计算出来的. 但定位模块并不发布map到base_link的转换. 相反它先接受从odom到base_link的转换, 再计算并广播map到odom的位置转换关系。
fixed_frame
RViz中认定的大世界就是fixed_frame
target_frame
Rviz中视觉跟踪的frame是 target_frame
2. RViz如何动态确定各个frame之间的坐标转换
先看一下启动RViz的launch文件,里面定要了服务于RViz的参数和node
"joint_state_publisher"节点获取urdf里面定义的rotate link并发布坐标转换给tf.否则会显示warning. 注意: "joint_state_publisher" 是Python写的,只支持ascii编码,不支持Unicode,如果发现RViz报告下面错误:
"No transform from [front_left] to [base_link]"
那就是因为urdf文件是Unicode编码的。
3. geometry_msgs/TransformStamped 消息的作用和机构
geometry_msgs/TransformStamped 就是通知ROS 两个frame之间的tf转换关系。当两个frame之间关系经常变化,如轮子移动,手臂关节移动等,则需要编写node来实时发布。查看该消息结构:Transform 其中transform就是我们关心的 tf 转换关系,child_frame_id是"base_link", header.frame_id 则是'odom'. 查看geometry_msgs/transform:
这里的x, y, z 就定义了两个frame的tf转换关系。
4. RViz中如何定义 base_link 和 odom 之间的 tf 坐标转换
要移动机器人,就需要向tf发布geometry_msgs/TransformStamped 消息通知ros base_linke相对于map的tf转换关系,也就是说告诉ROS运动的base_link相对于不动的odom位置偏移。这里的odom frame并不能定义在urdf文件里面,它是一个虚拟的。我们只需要RViz知道fixed_frame就是odom就可以了。所以在urdf.rviz文件中这样定义虚拟odom:如果现在启动 RViz来观察机器人:
肯定会得到错误警告,而且RViz中无法显示完整的机器人:
"No transform from [odom] to [base_link]"
这个错误很容易理解,没有任何地方定义odom和base_link之间的tf关系,他们之间是连续变化的,我们当然不能在任何地方写固定偏移量定义tf transform.
但是我们可以写一个node来不断的发送geometry_msgs/TransformStamped消息。被发送对象就是tf。 ROS官方有个实例完整代码如何发布odom到base_link的变换,代码实例直接拷贝并在本地编译。这个例子不断向odom主题发送消息更改odom与base_link之间的位移,位移的轨迹就是一个圆周。这个node名字叫 odom_publisher. 它其实做了两件事情:
1. 向 tf 发送geometry_msgs/TransformStamped 消息, 就是让机器人运动起来。
2. 向odom主题发送nav_msgs/Odometry导航消息,报告角速度,线速度和巡航角度。这部分代码相对本文来讲不是必须的。
同"joint_state_publisher" node一样,“ odom_publisher”需要在RViz启动之前启动,添加它的启动项。修改后的dispaly.launch文件:
再次打开RViz:
这次就看到机器人在地图空间中做规则的圆周运动了! 因为RViz收到了odom_publisher向tf发送的坐标转换内容。
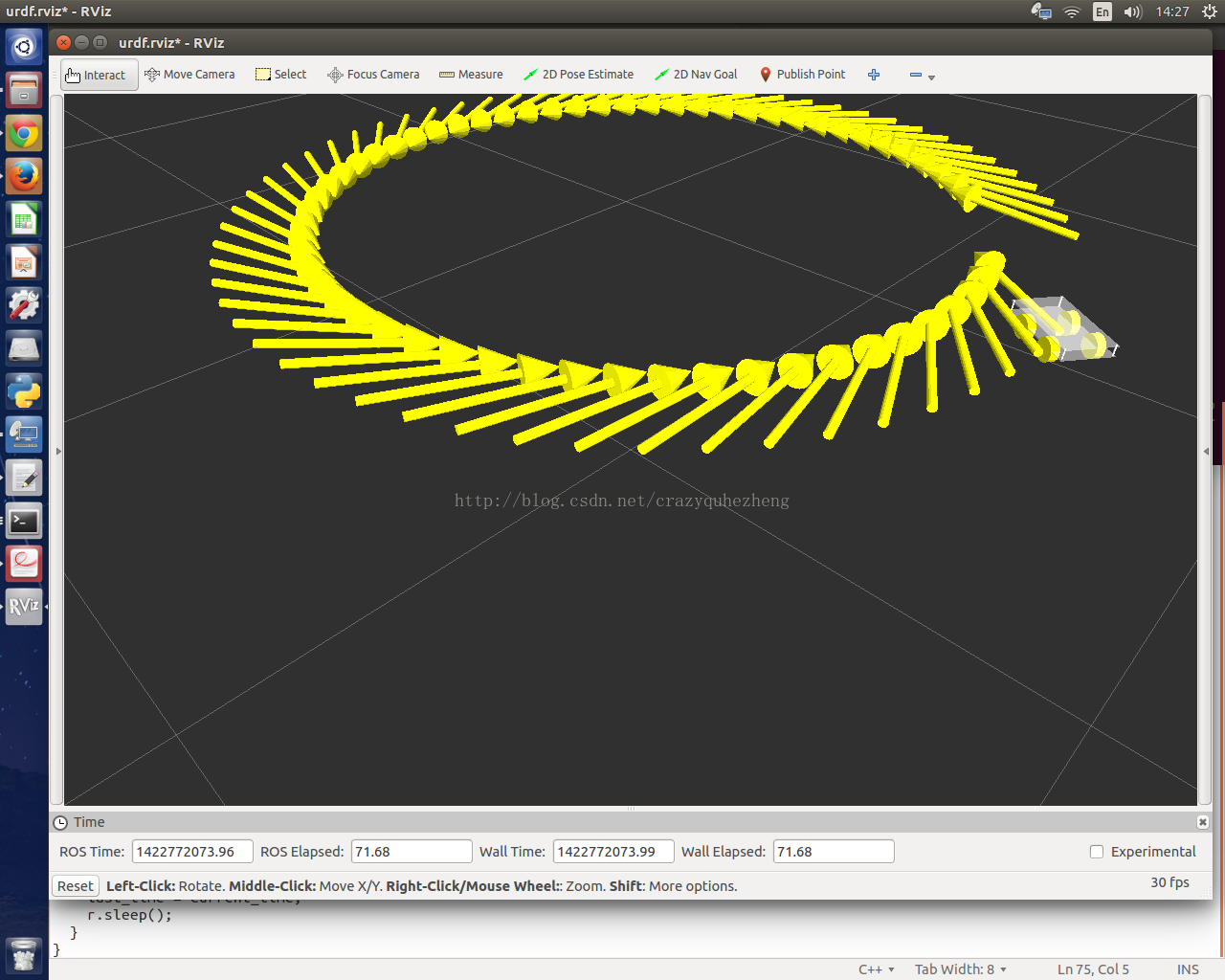
4. RViz中观察移动轨迹
“ odom_publisher”中还向 odom主题发布了nav_msgs/Odometry导航消息,这样就可以在RViz中显示运动轨迹了。在RViz中点击 'add',选中Odometry,配置该dispaly的topic为 "odom" 就可以看到不断变化的运动轨迹了。这是因为nav_msgs/Odometry中包含了线速度,角速度和巡航角度,所以RViz可以显示出来。
5.odom frame和 odom topic
这两个完全是不同的东西,很容易混淆。一个是地图上的一个参照系,一个是topic用来接收导航输入的。名字一样,纯属巧合!















 2447
2447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









