






1. 双目标定的意义
通过双目标定,确定左右相机之间的旋转、平移矩阵,方便后续能够实现从左右相机图像之间的像 素坐标到实际三维空间坐标的转换
2. 双目标定
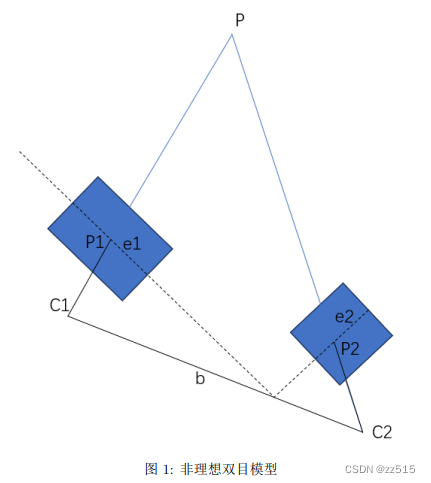
根据图一,对于左、右相机中某点,可得其与世界坐标中的某点映射关系式:
Pl , Pr 为左右相机成像面上某点在世界坐标系下的坐标,Rl , Rr 为左右相机的 旋转矩阵,Pw 为世界坐标系下某点坐标,tl , tr 为左右相机的平移矩阵。
经过变换可得:
Pl 到 Pr 的映射关系式:
联立方程式,可得:
为了能够减小由于噪声、图像质量以及相机标定参数估计等因素引起的误差,建议进行多次实验和重复校正。
3. 立体校正
在之前的笔记中提到过,为了简化模型,需要进行立体校正,使光轴平行。
立体校正有许多办法,比如 Hartley 校正、双线性插值校正和 Bouguet 校正等方法。
Hartley 校正通常通使用基础矩阵和极线约束,对左右图像进行极线矫正,将极线与图像的水平线 对齐,从而简化视差计算。
双线性插值通常是利用附近四个像素的值,按照距离进行加权平均,从而估计出目标位置上的像素 值。
Bouguet 校正方法结合了相机标定和极线校正,通过透视变换将图像投影到共同平面上,使极线对 齐于水平线,从而简化匹配和深度估计过程。
Bouguet 校正具体步骤:
1. 将旋转矩阵分解为左右相机的合成旋转矩阵
2. 使用平移矩阵 T 构造变换矩阵 Rrect 使得基线与成像平面平行, 该矩阵通常为:
2.1 构造与平移向量 t 同方向的极点,并使用变换矩阵将其变换到无穷远处,使极线达到水平。
式中
分别为t在
方向上的平移向量,
为t的欧几里得范数(长度)。
2.2 构造与图像平面同方向的向量,其与e1垂直。
2.3 e3通常垂直于$e1$与$e2$所在平面的向量
则最终左右相机的变换矩阵为:
左右两相机分别乘以这两个矩阵即可完成变换
















 291
291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









