






1.标定意义
标定:确定相机内参、外参以及校正误差
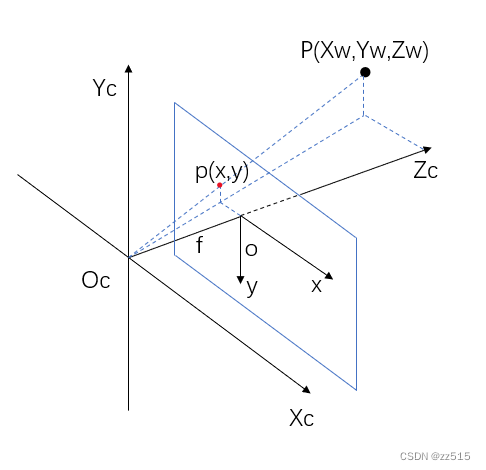
2.成像模型

世界坐标系Ow-XwYwZw:以外界某个参考点建立的坐标系
相机坐标系Oc-XcYcZc:以光心建立相机坐标系,Z轴指向相机正前方
图像坐标系xoy:光心在成像平面的投影
像素坐标系uOv:用于表示图像中的像素位置,原点通常位于图像左上角
2.1 世界坐标系->相机坐标系

世界坐标经过刚体变换(旋转与平移)与相机坐标对应起来,则世界坐标系下某点P(Xw,Yw,Zw)转换到相机坐标系下坐标P(Xc,Yc,Zc)的变换公式如下:

式中R为3X3的旋转矩阵,T为3X1的平移矩阵(相机外参)
2.2 相机坐标系->图像坐标系
由相似三角形关系:
![]()
则:
![]()
![]()
写为齐次形式:

2.3 图像坐标系->像素坐标系

根据上图,可得
![]()
![]()
dx,dy为每个像素在x轴、y轴所代表的物理尺寸,将公式转换为齐次形式:

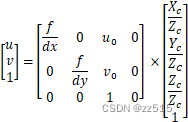
2.4 四大坐标系间关系

根据式(8)与式(5),可得:

式(1)代入式(9)可得:

整理可得世界坐标到像素坐标的映射关系式:

3.畸变校正
要注意的是,式(11)是在相机完全理想的情况下推导出来的,在实际中,由于镜头的设计和制造等原因,图像中的物体形状和位置会发生失真,即图像中的物体形状和尺寸与实际场景不符,影响图像的处理和分析,因此需要进行畸变校正。
通常而言,在进行畸变校正之前,为了简化模型、减少计算复杂度和保持精度,通常需要将图像中的像素点从二维坐标转换为三维世界坐标,并对其进行归一化处理:将三维空间点的坐标都除以Z
由式(9),可得

式(12)便为像素平面坐标到归一化平面坐标的映射关系式。
3.1 径向畸变

径向畸变通常与球面透镜、光学折射有关,对于径向畸变中的坐标变换,可由下列公式描述:
![]()
式中(x,y)为无畸变归一化平面下像素点的坐标,(x’,y’)为发生畸变后归一化平面下像素点的位置,r为曲率半径,有 ,
,
,
为径向畸变系数。
3.2 切向畸变

切向畸变产生的原因主要与成像平面与透镜平面不平行有关,坐标变换关系式可由以下数学公式来描述:
![]()
与
为切向畸变系数。














 2126
2126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









