







1.ORB特征简介
ORB是Oriented FAST and Rotated BRIEF(oFAST and rBRIEF)的简称,ORB的名字已经说明了其来源,其实ORB特征是采用FAST方法来检测提取特征,但FAST特征本身是不具有方向性的,所以在ORB特征中添加对特征方向的计算;另外,ORB采用BRIEF方法计算特征描述子,BRIEF的优点在于速度,但是缺点也很明显:不具备旋转不变性,对噪声敏感,不具备尺度不变性。orb-slam重点解决的是旋转不变性和噪声问题。接下来,首先针对orb特征进行详细说明,并在下一章节中针对orb-slam(version1)中的orb代码部分进行解析测试。
[以下为个人学习理解,如果错误,欢迎指正]
2.orb特征之oFAST
如何确定特征点?
FAST特征以其计算速度快被广泛使用,ORB特征除了使用FAST方法定位特征点位置之外,还针对特征点的方向进行了补充添加。
FAST特征的基本原理是对于当前像素点,取邻域离散圆周上若干采样像素点(如下图的p点表示当前像素位置,以3个像素点为半径,标号1-16的16个点表示圆周上采样的16个像素点)
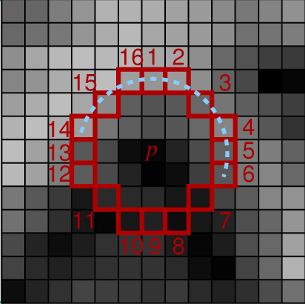
我们认为一个像素如果是“角点”(即特征点),那么这16个采样点中至少有N(N可以等于9,12等,对应于FAST-9,FAST-12等)个连续像素点要么大于当前像素点加上一个阈值,要么小于当前像素点减掉一个阈值,我们设这个阈值为t。但实际上,通常在图像中,“角点”的数量要远小于非“角点”的数量,所以可以采用一种更快速的方法来确定当前像素点是否为“角点”(实际上是快速的排除非特征点的像素),方法是,
1)当前像素点p与标号为1,9的像素点进行比较,如果有 Ip−t<Ii<Ip+t,i= 1 or 9 ,则当前像素点肯定不是“角点”,否则的话进行下一步判断;
2)当前像素点p与标号1,5,9,13的像素点进行比较,如果至少有三个像素点满足 Ii<Ip−t or Ii>Ip+t,i= 1 or 5 or 9 or 13,则认为当前像素点可能为“角点”,进行下一步判断;
3)当前像素点p与所有标号的采样像素点进行比较,如果至少有N (N可以等于9,12等,对应于FAST-9,FAST-12等)个连续像素点满足 Ii<Ip−
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 8745
8745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









