







转http://blog.csdn.net/bcj296050240/article/details/52778741
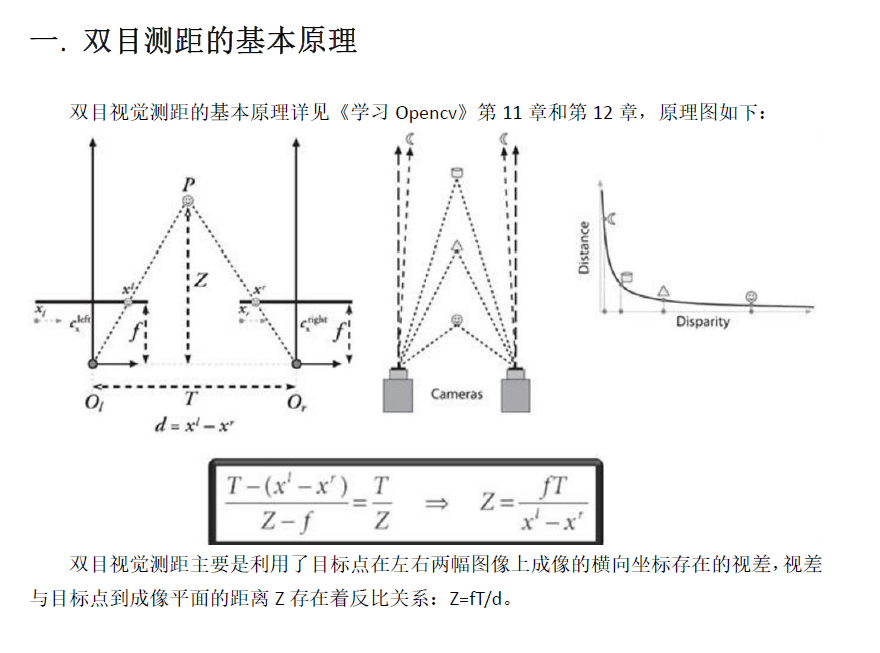
双目视觉原理方面参照《学习Opencv》和大牛博客 http://blog.csdn.net/chenyusiyuan/article/details/5970799中16-19系列博客。本文主要记录我自己在双目视觉标定,立体匹配,测量中遇到的问题和解决方法,并附有代码,文末有代码下载的地址,欢迎交流。
博主使用的相机是USB双目免驱相机,相机驱动见另外一篇博客:





**
有关该项目的代码和标定以及测量中使用的图片资源见以下链接:http://download.csdn.net/download/bcj296050240/9649827
**















 930
930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









