









 本文介绍了数字图像处理中边缘检测的基本概念与多种检测方法,包括Roberts算子、Sobel算子、Prewitt算子、Canny算子、LOG算子等。详细对比了这些方法的特点与适用场景。
本文介绍了数字图像处理中边缘检测的基本概念与多种检测方法,包括Roberts算子、Sobel算子、Prewitt算子、Canny算子、LOG算子等。详细对比了这些方法的特点与适用场景。
Y轴方向上的一阶差分定义为:
f(i,j+1)-f(i,j) (2.3.2)
利用图像灰度的一阶导数算子在灰度值变化显著的地方得到的极值来检测边缘点。它在某一个点的值就代表了该点的边缘强度值,可通过设置阈值来进一步得到边缘图像。但用差分的方法进行边缘检测必须使差分的方向和边缘的方向相垂直,这就需要对图像的不同方向分别进行差分运算,增加了运算量。一般可将边缘分为水平边缘、垂直边缘和对角线边缘:

2)Reborts算子
Reboerts算子是一种利用局部差分来寻找边缘的算子,Roberts 梯度算子所采用的是对角方向相邻两像素值之差,算子形式如下:
Roberts梯度算子对应的卷积模版为:

适当的阈值τ ,若 G ( x,y)>τ,则 (i ,j)为边缘点,否则,判断 (i ,j)为非边缘点。由此得到一个二值图像 { g (i,j)},即边缘图像。Roberts 算子采用的是用对角线方向上相邻两像素的差近似梯度幅值来检测边缘,它的定位精度高,对于水平和垂直方向的边缘,检测效果较好,而对于有一定倾角的斜边缘,检测效果则不理想,存在着许多的漏检。另外,在含噪声的情况下,Roberts 算子不能有效的抑制噪声,容易产生一些伪边缘。因此,该算子适合于对低噪声且具有陡峭边缘的图像提取边缘。
Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感
3)Sobel算子
Sobel算子在边缘检测算子扩大了其模版,在边缘检测的同时尽量削弱了噪声。其模版大小为3×3,其将方向差分运算与局部加权平均相结合来提取边缘。在求取图像梯度之前,先进行加权平均,然后进行未分,加强了对噪声的一致。Sobel算子所对应的卷积模版为:

梯度幅值 G ( x,y),然后选取适当的阈值τ ,若 G ( x,y)>τ,则 (i ,j)为边缘点,否则,判断 (i ,j)为非边缘点。由此得到一个二值图像 { g (i,j)},即边缘图像。Sobel 算子在空间上比较容易实现,不但产生较好的边缘检测效果,同时,由于其引入了局部平均,使其受噪声的影响也较小。若使用较大的邻域,抗噪性会更好,但也增加了计算量,并且得到的边缘比较粗。在对精度要求不是很高的场合下,Sobel 算子是一种较为常用的边缘检测算法。
——————————————————————————————————
转载请注明出处: http://blog.csdn.net/tianhai110
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
Sobel卷积因子为:
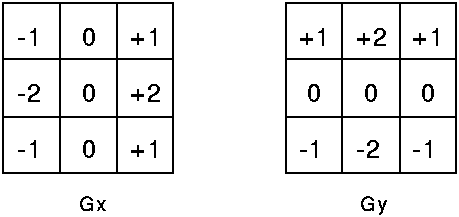
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
4)Prewitt 算子
同 Sobel 算子相似,Prewitt 算子也是一种将方向的差分运算和局部平均相结合的方法,也是取水平和垂直两个卷积核来分别对图像中各个像素点做卷积运算,所不同的是,Sobel 算子是先做加权平均然后再微分,Prewitt 算子是先平均后求微分,其对应的卷积模版为:


附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

——————————————————————







数字图像处理
几种边缘检测算子的比较
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化。这些包括:深度上的不连续、表面方向不连续、物质属性变化和场景照明变化。边缘检测是图像处理和计算机视觉中,尤其是特征提取中的一个研究领域。图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。有许多方法用于边缘检测,它们的绝大部分可以划分为两类:基于查找一类和基于零穿越的一类。基于查找的方法通过寻找图像一阶导数中的最大和最小值来检测边界,通常是将边界定位在梯度最大的方向。基于零穿越的方法通过寻找图像二阶导数零穿越来寻找边界,通常是Laplacian过零点或者非线性差分表示的过零点。
人类视觉系统认识目标的过程分为两步:首先,把图像边缘与背景分离出来;然后,才能知觉到图像的细节,辨认出图像的轮廓。计算机视觉正是模仿人类视觉的这个过程。因此在检测物体边缘时,先对其轮廓点进行粗略检测,然后通过链接规则把原来检测到的轮廓点连接起来,同时也检测和连接遗漏的边界点及去除虚假的边界点。图像的边缘是图像的重要特征,是计算机视觉、模式识别等的基础,因此边缘检测是图象处理中一个重要的环节。然而,边缘检测又是图象处理中的一个难题,由于实际景物图像的边缘往往是各种类型的边缘及它们模糊化后结果的组合,且实际图像信号存在着噪声。噪声和边缘都属于高频信号,很难用频带做取舍。
这就需要边缘检测来进行解决的问题了。边缘检测的基本方法有很多,一阶的有Roberts Cross算子,Prewitt算子,Sobel算子,Canny算子, Krisch算子,罗盘算子;而二阶的还有Marr-Hildreth,在梯度方向的二阶导数过零点。现在就来简单介绍一下各种算子的算法
1.1 Roberts算子
Roberts算子是一种利用局部差分算子寻找边缘的算子,它有下式给出:
x,y)=
其中、、 分别为4领域的坐标,且是具有整数像素坐标的输人图像;其中的平方根运算使得该处理类似于人类视觉系统中发生的过程。
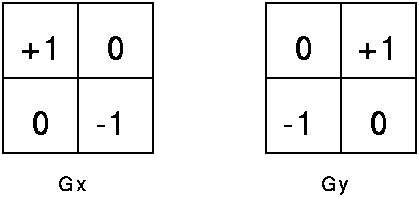
Roberts算子是2X2算子模板。图1所示的2个卷积核形成了Roberts算子。图象中的每一个点都用这2个核做卷积。
| 1 | 0 |
| 0 | -1 |
| 0 | 1 |
| -1 | 0 |
图1 Roberts算子
1.2 Sobel算子
Sobel算子是一种一阶微分算子,它利用像素邻近区域的梯度值来计算1个像素的梯度,然后根据一定的绝对值来取舍。它由下式给出:
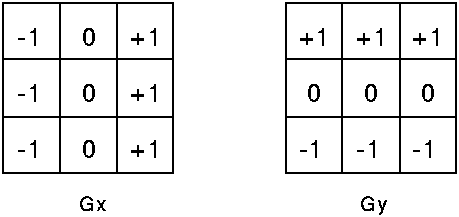
Sobel算子是3*3算子模板。图2所示的2个卷积核dx 、 dy形成Sobel算子。一个核对通常的垂直边缘响应最大,而另一个核对水平边缘响应最大。2个卷积的最大值作为该点的输出值。运算结果是一幅边缘幅度图像。
| -1 | 0 | 1 |
| -2 | 0 | 2 |
| -1 | 0 | 1 |
| 1 | 2 | 1 |
| 0 | 0 | 0 |
| -1 | -2 | -1 |
图2 Sobel算子
Prewitt算子
Prewitt算子由下式给出:
Prewitt算子是3*3算子模板。图3所示的2个卷积核dx ,dy.形成了Prewitt算子。与Sobel算子的方法一样,图像中的每个点都用这2个核进行卷积,取最大值作为输出值。Prewitt算子也产生一幅边缘幅度图像。
| -1 | 0 | 1 |
| -1 | 0 | 1 |
| -1 | 0 | 1 |
| 1 | 1 | 1 |
| 0 | 0 | 0 |
| -1 | -1 | -1 |
1.3 Canny算子
Canny算子是是一阶算子。其方法的实质是用1个准高斯函数作平滑运算fs=f(x,y)*G(x,y),然后以带方向的一阶微分算子定位导数最大值。
平滑后fs(x,y)的梯度可以使用2*2的一阶有限差分近似式:
P[i,j]≈(fs[i,j+1]-fs[i,j]+fs[i+1,j+1]-fs[i+1,j])/2
Q[i,j] ≈(fs[i,j]-fs[i+1,j]+fs[i,j+1]-fs[i+1,j+1])/2
在这个2x2正方形内求有限差分的均值,便于在图像中的同一点计算二和y的偏导数梯度。幅值和方向角可用直角坐标到极坐标的坐标转化来计算:
M[i,j]=
M[i,j]反映了图象的边缘强度;反映了边缘的方向。使得M}i,j}取得局部最大值的方向角,就反映了边缘的方向。
Canny算子也可用高斯函数的梯度来近似,在理论上很接近4个指数函数的线性组合形成的最佳边缘算子。在实际工作应用中编程较为复杂且运算较慢。
2.1 LOG滤波器
LOG滤波器又称Marr-Hildreth模板或算子
=
式中:G(x,y)是对图像进行处理时选用的平滑函数(Gaussian函数);x,y为整数坐标; σ为高斯分布的均方差。对平滑后的图像fs(fs=f(x,y)*G(x,y))做拉普拉斯变换,得:
h(x,y)=G(x,y)
即先对图象平滑,后拉氏变换求二阶微分,等效于把拉氏变化作用于平滑函数,得到1个兼有平滑和二阶微分作用的模板,再与原来的图像进行卷积。用Marr-Hildreth模板与图像进行卷积的优点在于,模板可以预先算出,实际计算可以只进行卷积。
LOG滤波器有以下特点:
(1)通过图象平滑,消除了一切尺度小于σ的图像强度变化;
(2)若用其它微分法,需要计算不同方向的微分,而它无方向性,因此可以节省计算量;
(3)它定位精度高,边缘连续性好,可以提取对比度较弱的边缘点。
LOG滤波器也有它的缺点:当边缘的宽度小于算子宽度时,由于过零点的斜坡融合将会丢失细节。
LOG滤波器有无限长的拖尾,若取得很大尺寸,将使得计算不堪重负。但随着:r=的增加,LOG滤波器幅值迅速下降,当r大于一定程度时,可以忽略模板的作用,这就为节省计算量创造了条件。实际计算时,常常取n* n大小的LOG滤波器,近似n=3σ。另外,LOG滤波器可以近似为两个指数函数之差,即DOG ( Difference Of two Gaussians functions):
DOG(σ1,σ2)=-
当σ1/σ2=1.6时,DOG代替LOG减少了计算量。
几种算子的比较
Robert算子定位比较精确,但由于不包括平滑,所以对于噪声比较敏感。
Prewitt算子和Sobel算子都是一阶的微分算子,而前者是平均滤波,后者是加权平均滤波且检测的图像边缘可能大于2个像素。这两者对灰度渐变低噪声的图像有较好的检测效果,但是对于混合多复杂噪声的图像,处理效果就不理想了。
LOG滤波器方法通过检测二阶导数过零点来判断边缘点。LOG滤波器中的a正比于低通滤波器的宽度,a越大,平滑作用越显著,去除噪声越好,但图像的细节也损失越大,边缘精度也就越低。所以在边缘定位精度和消除噪声级间存在着矛盾,应该根据具体问题对噪声水平和边缘点定位精度要求适当选取。
讨论和比较了几种常用的边缘检测算子。梯度算子计算简单,但精度不高,只能检测出图像大致的轮廓,而对于比较细的边缘可能会忽略。Prewitt 和Sobel 算子比Roberts 效果要好一些。LOG 滤波器和Canny 算子的检测效果优于梯度算子,能够检测出图像较细的边缘部分。不同的系统,针对不同的环境条件和要求,选择合适的算子来对图像进行边缘检测。

















 853
853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









